


Система вертикального взлета или многофункциональная система подъема и транспортировки различных грузов.
Некоторое время назад мы задумались над решением взлета наших больших моделей без помощи катапульты, и следующая мысль, вообще любые грузы. У нас в наличие есть уже отработавший свое проект дрона большой грузоподъемности. Некоторые детали и агрегаты мы заберем из этого изделия.
В первую очередь мощные моторы, регуляторы.
По идее данную платформу можно быстро установить на любой нужный объект. При помощи моторов, полетного контроллера и пульта управления можно перемещать объекты и грузы в пределах прямой видимости на небольшие расстояния и высоту. В нашем случае это примерно в 300 метровом диапазоне.
Но есть сомнения. Во многих вопросах. Поэтому делаем пилотный проект. После испытаний будем повторять в более надежном и красивом виде. Карбон, келавр, нано технологии, какие там сегодня слова в фаворе.

Начинаю изготовление сменных модулей.
В качестве основы крепления моторов выбираю достаточно толстые трубки от удилищ. Которые некоторое время назад нам презентовал наш товарищ по борьбе. Активный рыбак с товарищами принесли в моделку большую связку поломанных удилищ.
В торцы трубочек нужно изготовить цилиндрические вставки. Из буковых заготовок вытачиваем нужного диаметра вставки.


Примеряю. Точность необходима, поэтому в качестве измерителя у нас цифровой штангельциркуль. Поскольку трубочки от удилищ имеют некоторую конусность от одного конца к другому. Точеные детали примеряю по месту.
 Места зажима в патрон токарного станка нужно отпилить.
Места зажима в патрон токарного станка нужно отпилить.
 Хорошо и плотно вошел цилиндрик в трубку. И так четыре раза. Не зря все вымерял с такой точностью.
Хорошо и плотно вошел цилиндрик в трубку. И так четыре раза. Не зря все вымерял с такой точностью.


Начинаю подгонять мотораму к трубке. Отмечаю ненужное место, все убрать.
 При помощи вставышей подгоняю закрепление моторамы в конце трубки без биения. После всю эту конструкцию заклею на эпоксидной смоле с наполнителем из стеклосферы.
При помощи вставышей подгоняю закрепление моторамы в конце трубки без биения. После всю эту конструкцию заклею на эпоксидной смоле с наполнителем из стеклосферы.
 Для продолжения работы приготовил столик, лобзик, пилки и шкурку. Нужно изготовить элементы крепления этой конструкции к различным предметам. Которые мы решили транспортировать в пространстве.
Для продолжения работы приготовил столик, лобзик, пилки и шкурку. Нужно изготовить элементы крепления этой конструкции к различным предметам. Которые мы решили транспортировать в пространстве.



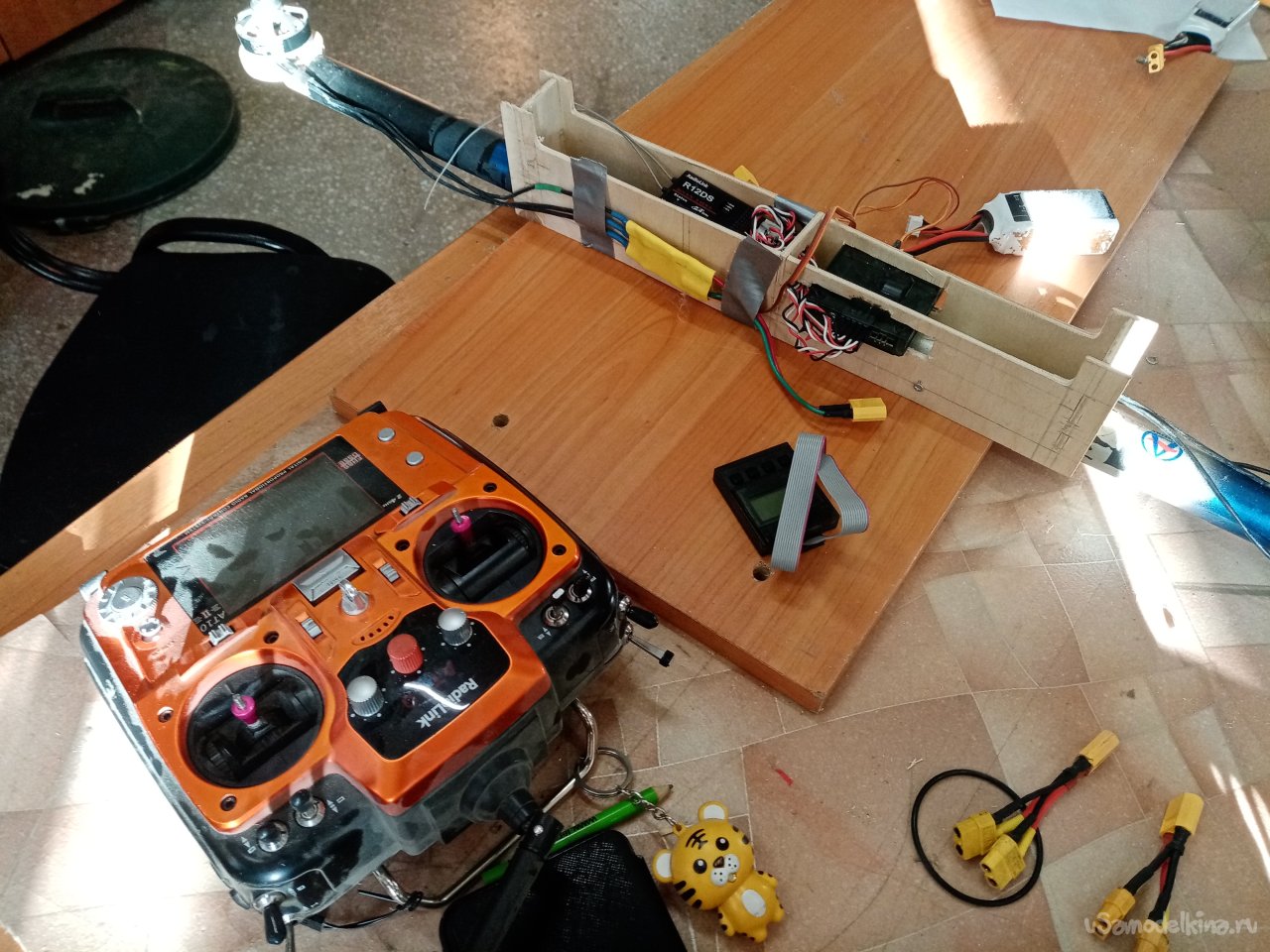
Вычерчиваю нужные детали на 4 мм шлифованной фанере. Для точности нужно элементы размечать вместе и разом. В моем понимании, так достигается нужная точность. Должны получиться длинные фанерные коробочки, в которых будут помещаться аккумуляторы. Регуляторы. Полетный контроллер и приемник. Между собой две платформы будут связаны проводами управления для синхронизации работы двигателей.


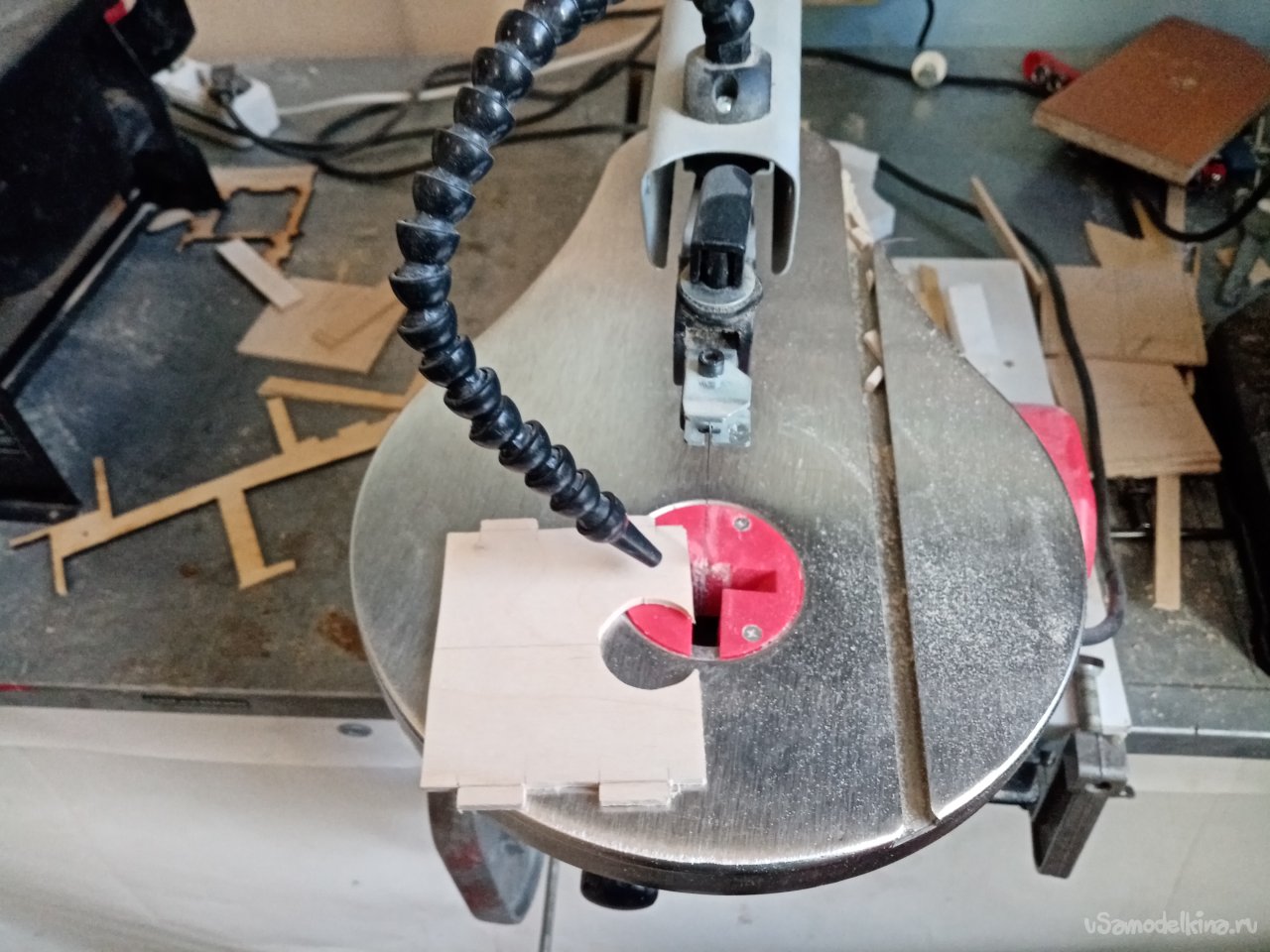
Разметка закончена и начинается пилеж. Не только ручным лобзиком но и механическим. Его некоторое время назад мы смогли купить по гранту. И долго я к нему приспосабливался. Он упорно не хотел ровно резать. Победил железяку. Теперь можно даже радиусы пилить.

После выпиливания нужных деталей и подгонки. Склеиваю все в кучу при помощи клея ПВА. При работе с деревом применяю только его. Кто не в курсе это «поливинилацетатная эмульсия» полное название. Из больших банок переливаю её в маленькие, так удобнее пользоваться. После склейки еще раз проливаю все стыки для большей прочности соединения.


Нужно немного перепаять и поработать с регуляторами. После проверок затягиваю в термоусадку. Стараюсь работать при небольшой температуре и после нагрева сразу охлаждаю влажной тряпочкой. Во избежание.

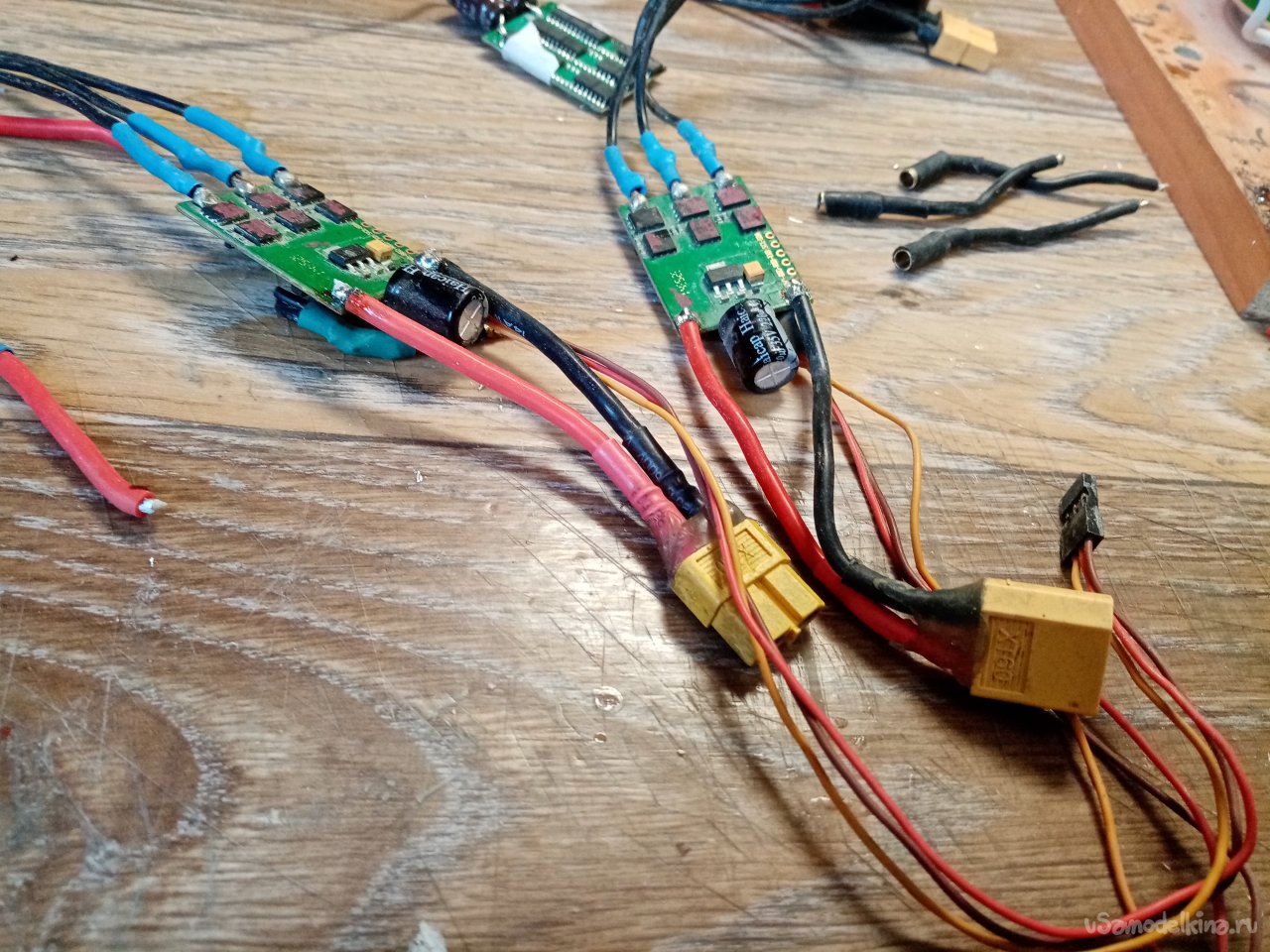



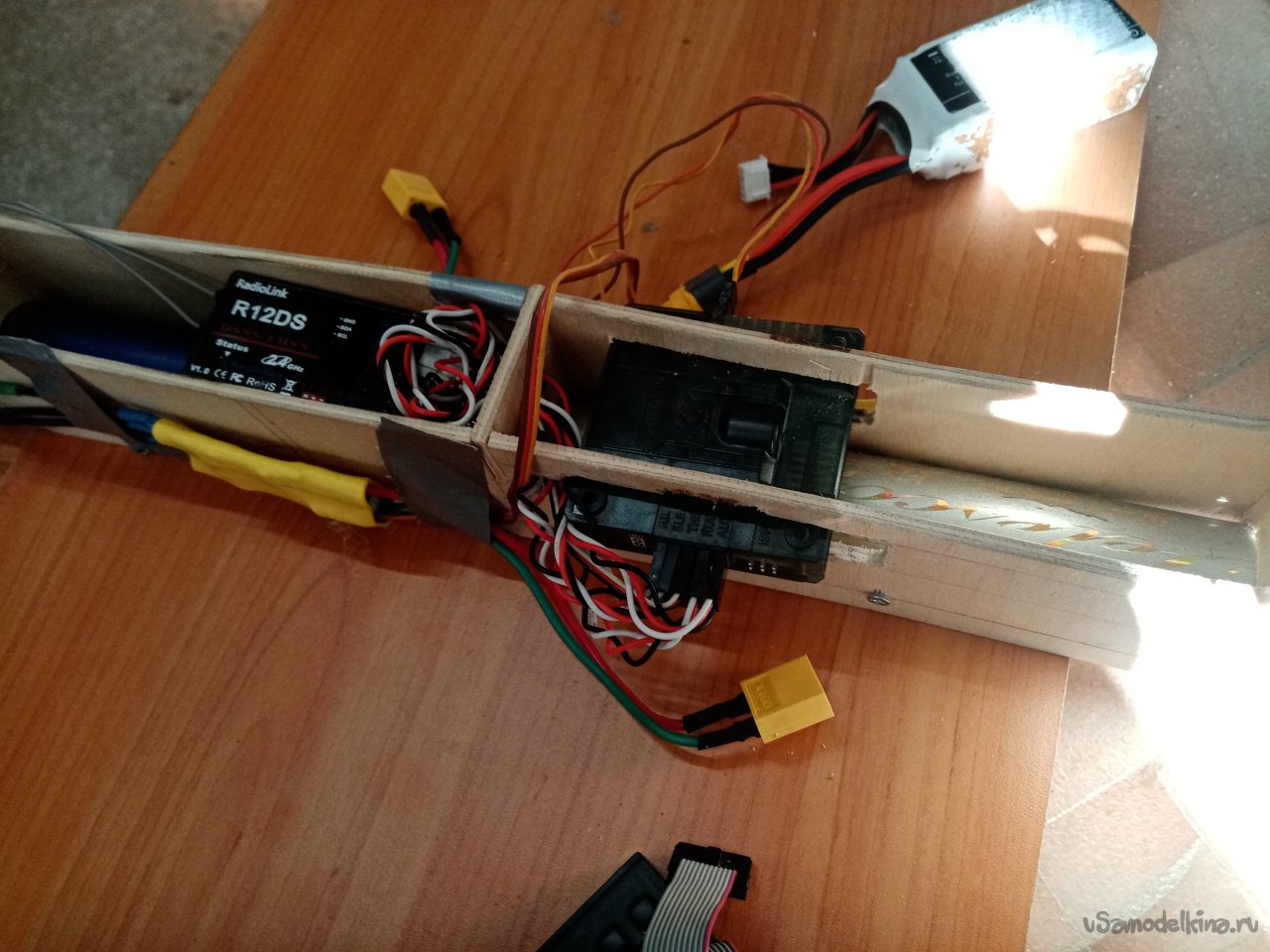
Изготовил переходники для аккумуляторов и регуляторов. В бой вступает моя отличная паяльная станция. Которою я притащил из Германии в страшно лохматом году 1997. Работает, только жала меняю. Отличный агрегат. В каждом подвесном блоке подъемника будет один аккумулятор, два регулятора и два мотора. Все это великолепие нужно запихнуть в вырезанные коробочки. Снимаю с полки коробочку с разъемами, сейчас начнется паялово жестокое. Поскольку амперов будет достаточно много, тщательно пропаиваю все и затягиваю в термоусадку.




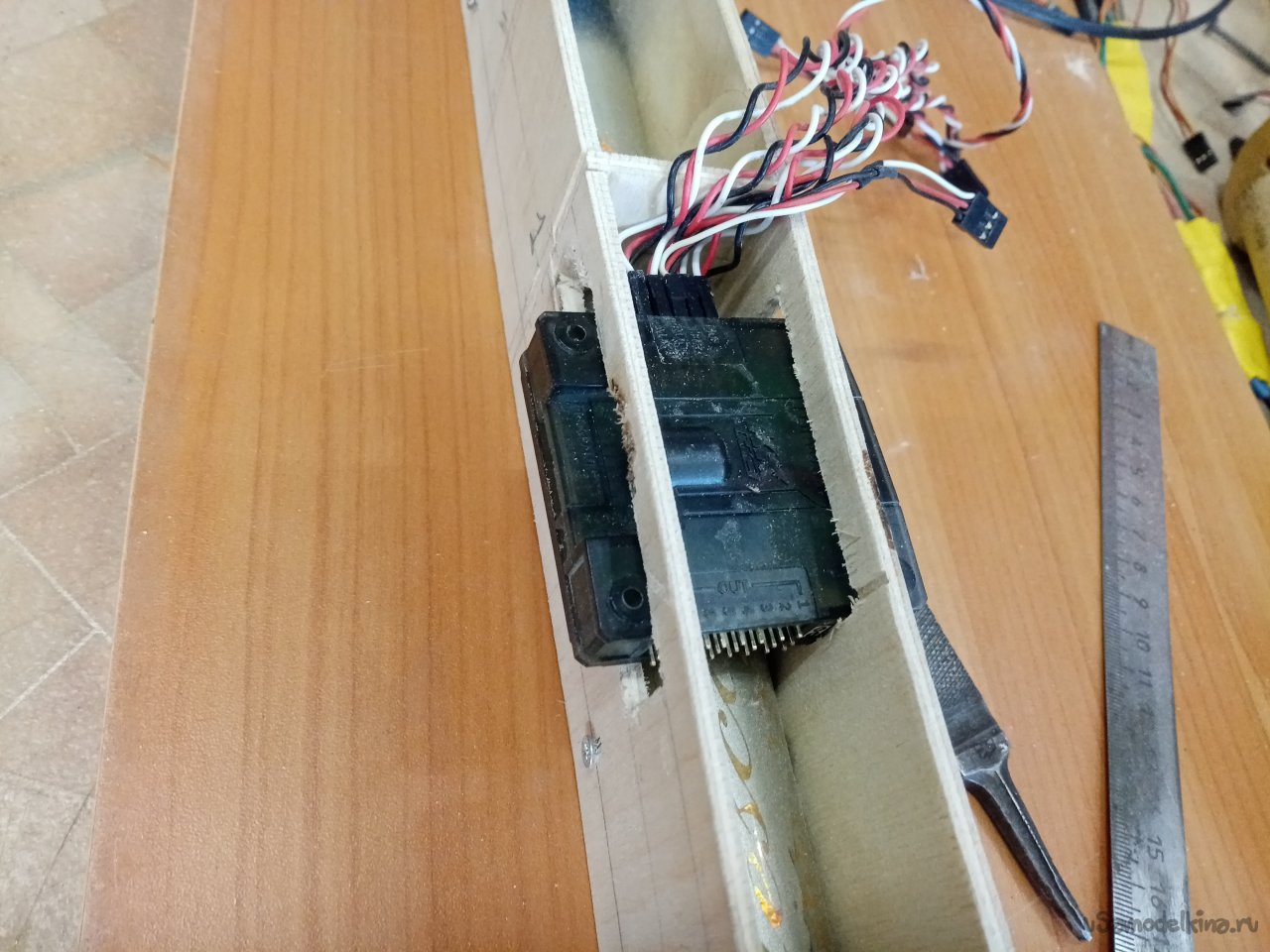
Настал черед установки полетного контроллера и приемника от передатчика. На корпусе полетного контроллера изображена стрелочка. Этим местом он должен быть повернут по полету.


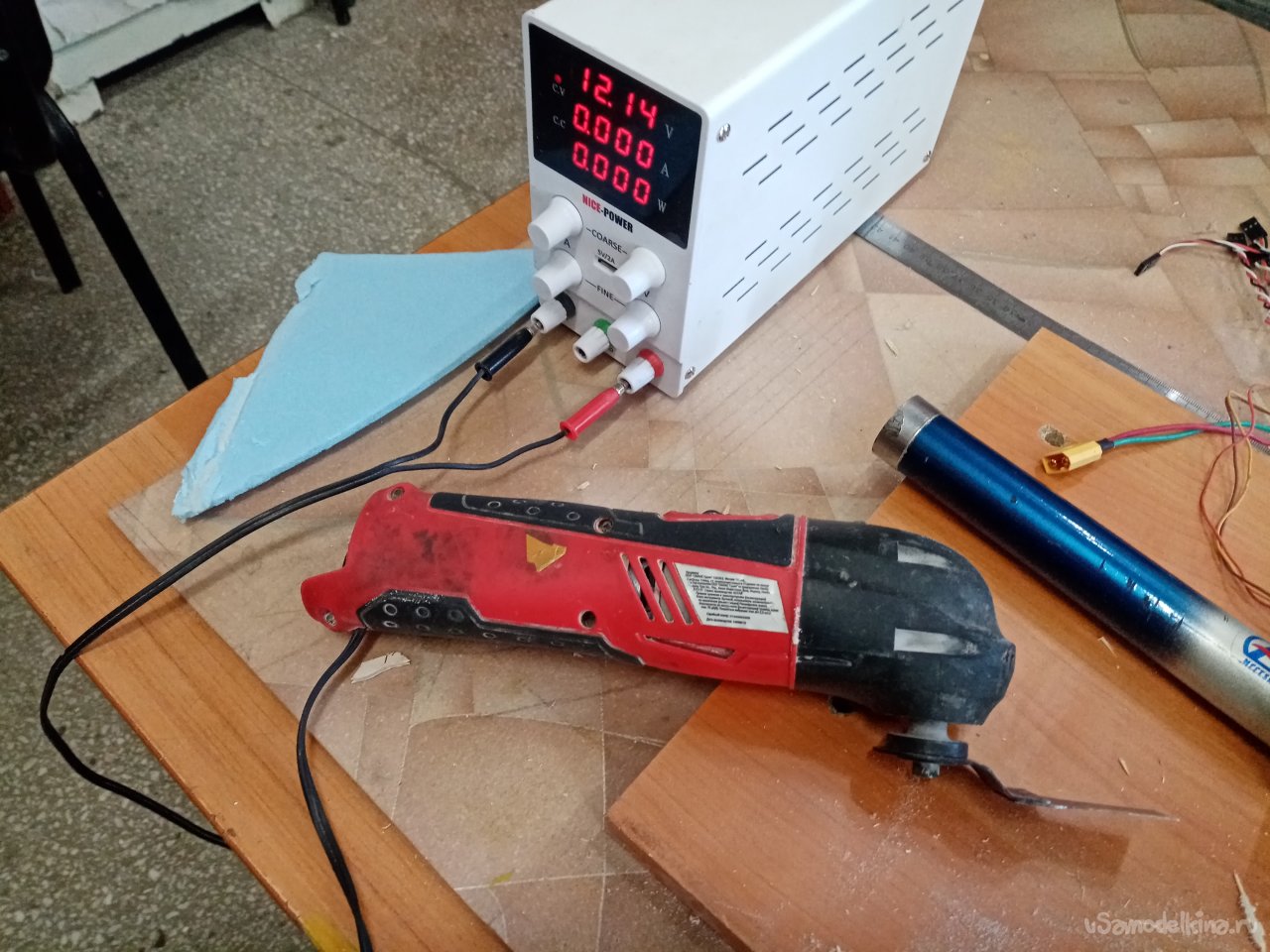
В впопыхах упустил этот момент. Сейчас буду исправлять. Размечаю габариты отверстия в стенках коробочки, можно пилить. При помощи реноватора. Отличная штука у нас , хоть и старая. Аккумуляторы уже давно приказали долго жить. Запитываю от блока питания. Режет отлично, хотя звук работы очень скверный. Через несколько секунд отверстие готово можно примерять прибор.


Подошло как нельзя лучше.
 При помощи вертикального рейсмуса размечаю положение для сверления болтов крепления трубы к коробочке с оборудованием. И сверлю отверстия.
При помощи вертикального рейсмуса размечаю положение для сверления болтов крепления трубы к коробочке с оборудованием. И сверлю отверстия.
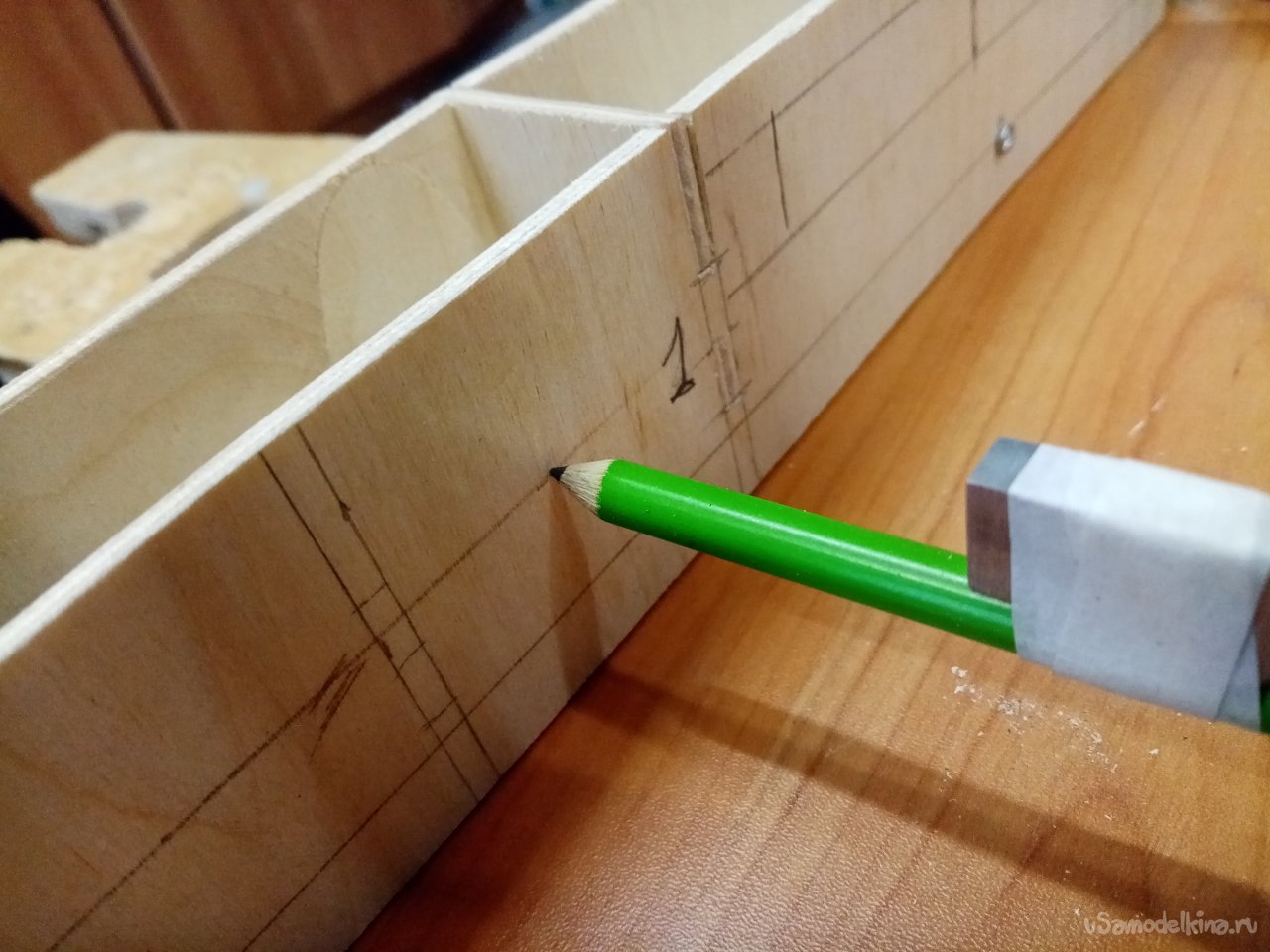


Болтики прошли насквозь, закрепили трубы.
 Впереди установка всего оборудования и настройка управления и прошивка полетного контроллера.
Впереди установка всего оборудования и настройка управления и прошивка полетного контроллера.

На верхние края коробочки наклеиваю полоски их плотного упаковочного поролона. Чтобы не повредить груз, который будем поднимать. Приклеиваю на водостойкий обувной клей. Строго по инструкции, наношу на обе поверхности. Выжидаю и приклеиваю. Думаю, получилось прочно.
Последним этапом. Приклейка моторам в трубку. Прошел успешно, на грани фола. Чего-то не так развел. После установки моторов, остатки смолы закипели.




К поднимаемой конструкции наша платформа будет прижиматься резиновыми лентами. Быстро и практично.


Для первых испытаний установили на достаточно тяжелую модель. Расположив в центре тяжести ось конструкции.




Первые полеты проводили …. Конечно, не скажу где. После продолжительных танцев в бубном, настроек, подстроек. Аппарат бодро поднял модель на 10 метров примерно, можно было комфортно маневрировать. Не смотря на достаточно тяжелый груз, испытания прошли удачно. Двигатели нашего подъемного механизма могут поднять по 4,5 кг каждый. Так что мощности было с избытком.
Следующим вариантом у нас были подъемы летающего крыла. Сложно. Поскольку закрепить механизм точно в центре тяжести не позволяла конструкция крыла. Мешали элевоны во весь размах. Крепление осуществили на концах крыльев, несколько позади центра тяжести. Но контроллер полета не подвел, хорошо компенсировал это небольшое отклонение.



Подъем третьей модели не вызвал проблем. Конструкция крыла позволяла хорошо расположить пропеллеры, все полетело с первого раза.



В статье описываю процесс, кажется, хорошо и быстро. На самом деле на настройки и испытательные полеты ушли две недели. Помимо данного проект еще работа есть и каждый день.
В последний день подняли в воздух контейнер с планером. Отлично полетело большое полено. Удобно переносить, еще и ручка есть.





Главная задача проекта была достигнута. Впереди еще куча работы. По идее комбинация подъемника выглядит следующим образом. Два пилота действуют одновременно. Один поднимает модель воздух и разгоняет её до необходимой горизонтальной скорости. После в действие вступает пилот, включает двигатель модели и осуществляет полет. При заходе на посадку все происходит в обратном порядке. Пилот подводит модель в зону посадки на скорости, второй включает моторы подвеса, пилот выключает тяговый двигатель. Модель зависает и садится вертикально. Можно конечно объединить управление коптера и модели, но тогда пропадает универсальность устройства. Которое как мы задумали, можно навесить на любой объект, например на контейнер с планером.
Испытания на полет еще впереди. Вот только зима встанет, слякоть уйдет, полетим.


