


Приветствую всех читателей. Сегодня я поделюсь инструкцией по модернизации или «апгрейду» ранее изготовленной модели квадрапода (четырехногого робота шагохода). Немного о том зачем нужен этот «апгрейд». В предыдущей версии стоял контролер ESP8266-12F, и его выводов еле хватило на 8 сервоприводов. Хотелось что-нибудь добавить, но свободных выводов не осталось. Кроме этого, я не люблю (считаю неудобным) управление роботом или моделью через сенсорный телефон. Нет ощущения нажатия кнопки управления. И третья причина, у ESP, стоявшей на квадроподе, сгорел GPIO10 (возможно из-за того, что этот вывод используется для связи с памятью), а без одного сервопривода – двигательная способность утеряна. Итак, суть «апгрейда» - замена платы управления на Arduino Pro Mini. Управление будет по средствам Bluetooth канала.
Видео:
Необходимо:
- Arduino Pro Mini Atmega 328 5V
- Bluetooth модуль HC-05 или подобный.
- Старый аккумулятор от ноутбука (необязательно, если есть Li-ion 18650)
- Сервопривод SG-90 8 шт.
- Кнопка с фиксацией положения
- Соединительные провода
- Dupont 2,54 мм 1х4 и 1х2
- Гнездо зарядки 6 мм
- USB-TTL
- Болтики 3х12
- Метчик резьбы на 3 мм
- Шайбы пластиковый 4мм и 6 мм
- Гайки 3мм
- Сверла по металлу 3 мм, 4мм, 6мм
- Чупа-чупс 3 шт
- Дрель
- Набор инструментов
- Канцелярский нож
Шаг 1 Изготовление корпуса.
Если вы уже делали этот квадропод, вам нужно будет его полностью разобрать. Все провода от ESP надо отпаять.
В своей предыдущей статье об этом квадроподе я подробно описал процесс изготовления и сборки корпуса, нет смысла повторяться. Архив с деталями, инструкция и фотографии берем из шага 1 следующей статьи.
Детали печатаем, красим, если хотите, но воедино все не собирайте.
Шаг 2 Модернизация ног.
Предыдущая модель имела большие люфты в местах соединения подвижных деталей. Получилось так из-за небольших неточностей при расчете деталей, а также небольших сдвигов при печати этих деталей. В результате ноги робота достаточно сильно болтались, а при ходьбе создавалось впечатление, что идет что-то везом пару тонн, а не маленький квадропод. В решении этой проблемы нам поможет Чупа-чупс! А точнее трубочки от него. Чупа-чупс надо покупать стандартного размера, то есть маленький:

Для начала внутри трубки Чупа-чупс надо нарезать резьбу. Брем метчик резьбы на 3мм:

И нарезаем резьбу. Удобнее это делать пока Чупа-чупс не съеден. Удобно держаться за сам леденец, пока нарезаешь резьбу на трубке с другого конца. При нарезании не стоит прилагать много усилий, так как пластиковые трубочки достаточно легко скручиваются. Поэтому действуем так: вкручиваем на миллиметра 3 - 4 метчик, затем выкручиваем, очищаем метчик, снова вкручиваем уже на 6 – 7 и так далее. Нарезав резьбу примерно на 10 мм останавливаем и берем детали квадрапода. В местах соединения деталей, наружные отверстия деталей (красные детали ног у меня), в которые до этого вкручивались болтики, просверливаем используя сверло на 3 мм. Это нужно чтобы болтики свободно проходили, но при этом не болтались. Отверстия, которые находиться внутри соединений, у меня на фото это синие детали ног, рассверливаем 4 мм сверлом. Внутрь этих отверстий мы будем вставлять втулки из трубочек Чупа-чупс. Вставляем трубочку с нарезанной резьбой в подготовленное отверстие и отрезаем втулку нужной нам длины:
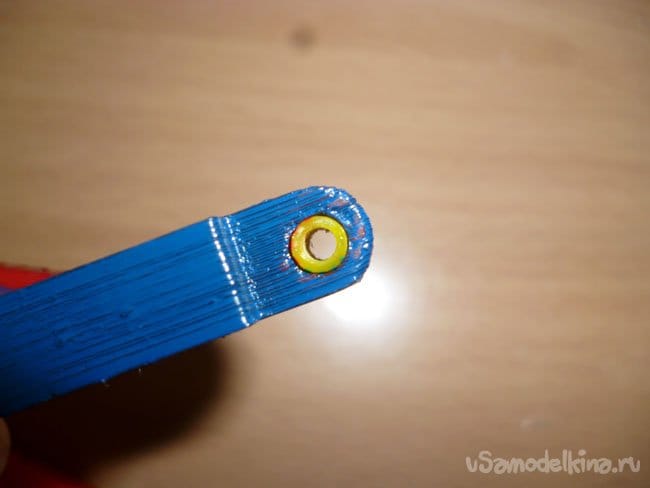
У меня они желтого цвета, но у вас могут и быть и белого, разницы не какой, их все равно не видно:

В оставшейся трубочке снова нарезаем резьбу на глубину примерно 10 мм. Затем проделываем такое со всеми внутренними отверстиями на ногах, на одной ноге их 3, всего 12 втулок понадобиться:


При сборке в эти втулки будут вкручиваться болтики 3х12.
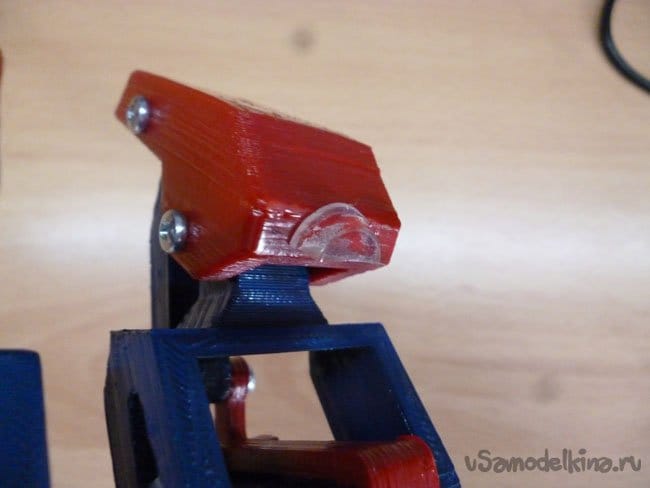
На конце ног стоит приклеить силиконовые, мебельные накладки:
Шаг 3 Подготовка аккумуляторов.
Стоявшие у меня аккумуляторы свое отработали. Если у вас аккумуляторы целы, можете пропустить этот шаг.
Ждать доставки Li-ion 18650 очень не хотелось. И поэтому мы пойдем другим путем. У меня завалялся старый Li-ion аккумулятор от ноутбука. Думаю у многих самодельщиков такой найдется в закромах. Внутри них есть все те же элементы 18650. И даже если для ноута их не хватало, для такой небольшой игрушки сойдет. Разбираем аккумулятор ноутбука и видим элементы 18650 спаянные воедино и плату управления:

Вначале снимает плату, чтобы она не мешала:

Взяв кусачки разделяем аккумулятор на пары, спаянные параллельно:

Вот именно их мы и будет ставить внутрь корпуса.
Шаг 4 Модернизация корпуса.
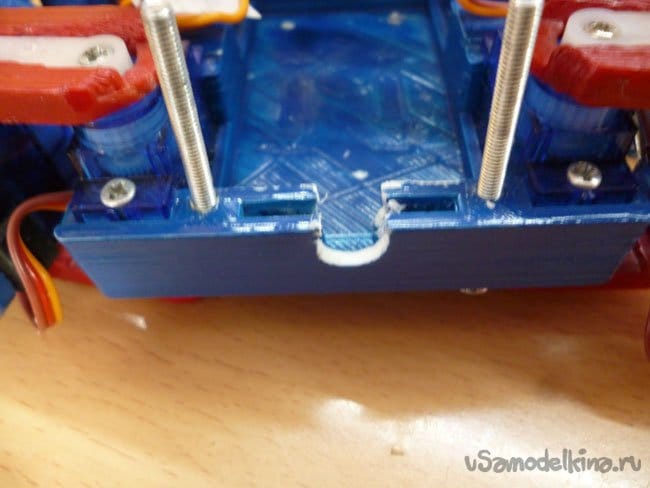
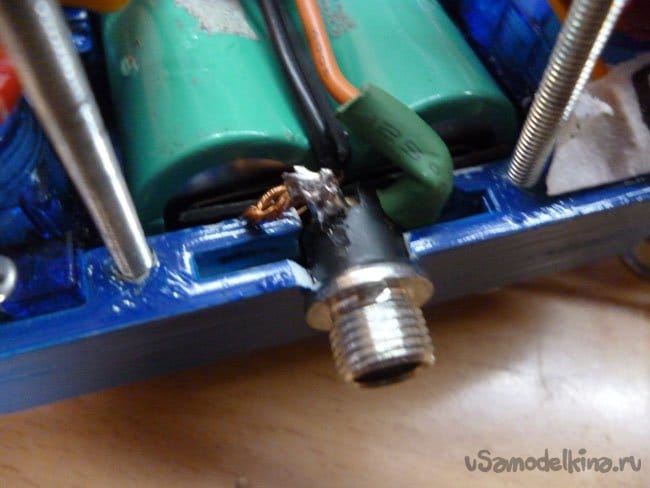
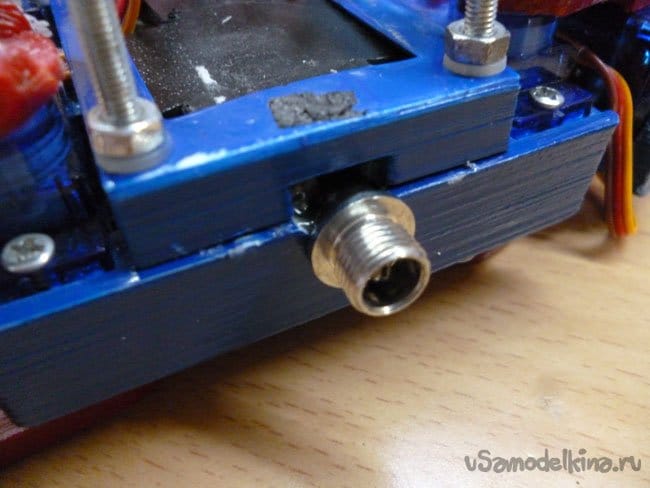
С корпусом тоже были неудобства. Прошлый раз для зарядки аккумуляторов я вывел наружу провод с коннектором. Это не очень удобно, провод все время болтался и цеплялся за все подряд. Поэтому делаем прорезь для нормального гнезда зарядки:
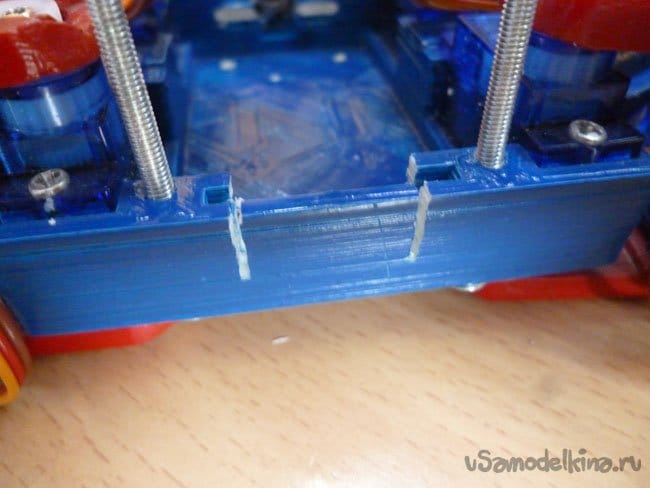
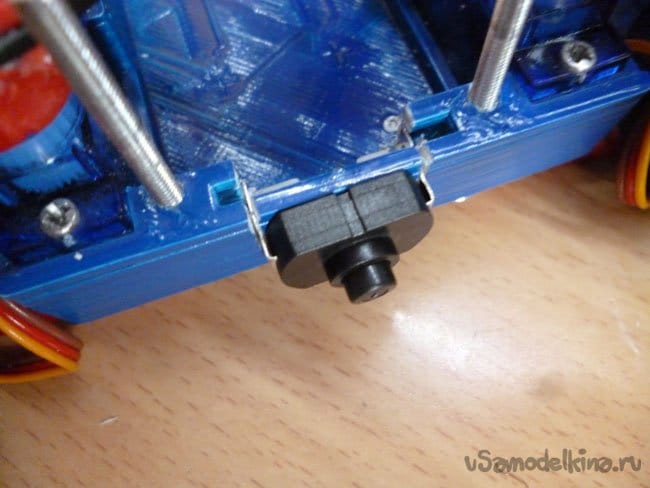
С другой стороны корпуса делаем прорезь для кнопки включения. Кнопок великое множество, поэтому ориентируйтесь на то что есть у вас, главное, чтобы кнопка была с фиксацией положения:
Используем гнездо для зарядки на 6 мм. Оно отлично сюда подходит. Вставляем аккумуляторы, вставляем гнездо. Припаиваем плюс от аккумуляторов к центральному контакту гнезда, и еще один провод выводим просто наверх пока, минус припаиваем к внешнему контакту гнезда, и также, как и с плюсом, выводим минусовой провод наверх:
Устанавливаем кнопку в специально подготовленное место для нее:
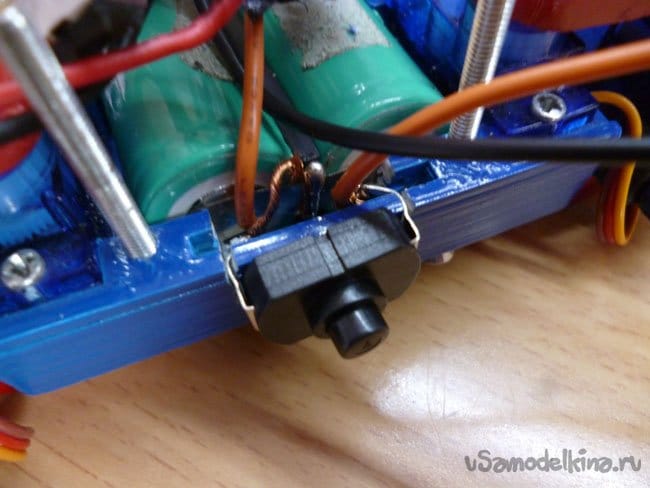
Припаиваем кнопку в разрыв плюсового провода, который мы вывили наверх:
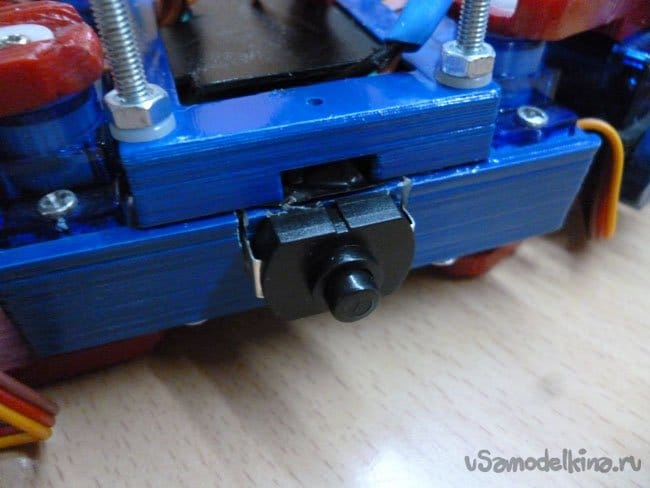
Сверху закрываем корпус крышкой, вывев наверх два провода:
Шаг 5 Модернизация управляющей электрики.
Плату управления мы меняем на Arduino Pro Mini. Нам нужно версия с Atmega 328 и работающую от 5 вольт. Дам небольшой совет. Arduino лучше прошить до установки на квадропод. Чтобы не было случайных действий от сервоприводов при включении. У платы нужно распаять коннекторы – штырьки только со стороны выводов TX, RX, VCC, GND. Подключать, то есть припаивать, провода от сервоприводов будем сразу к плате, без коннекторов. Клеим плату на двусторонний скотч рядом с гнездом зарядки и начинаем припаивать. Сервоприводы пронумерованы по часов стрелке, вначале привод на корпусе, потом привод для подъема этой ноги, затем привод на корпусе, следующий по часов стрелке и так далее.
Раскладка сервоприводов такая:
Servo 0 – A3 (17) (смотреть сверху, гнездо зарядки к вам, левая нога ближе к гнезду, привод на корпусе)
Servo 1 – A2 (16) (левая нога ближе к гнезду, привод подъема)
Servo 2 – A1 (15) (левая нога ближе к кнопке, привод на корпусе)
Servo 3 – A1 (14) (левая нога ближе к кнопке, привод подъема)
Servo 4 – PIN 5 (правая нога ближе к кнопке, привод на корпусе)
Servo 5 – PIN 4 (правая нога ближе к кнопке, привод подъема)
Servo 6 – PIN 3 (правая нога ближе к гнезду, привод на корпусе)
Servo 7 – PIN 2 (правая нога ближе к гнезду, привод подъема)
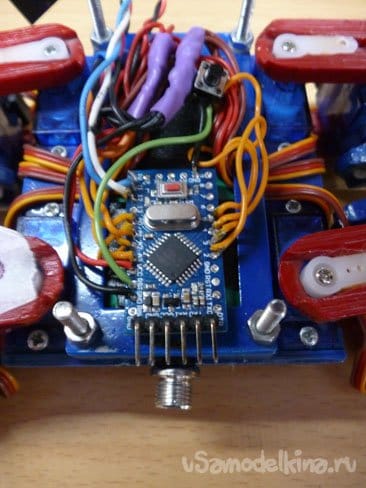
Припаиваем сигнальные провода от приводов согласно схеме выше. Провода питания от сервоприводов спаиваем вместе и подпаяйте еще два проводка. Один для питания Arduino. Плюс от аккумуляторов припаиваем в контакту 5V ардуино. Второй для питания Bluetooth модуля. Также необходимо вывести кнопку Reset от Arduino, для осуществления заливки скетча. И припаять провода к Pin 11 и Pin12, нужны для соединения с Bluetooth модулем. После всех манипуляций получается примерно так:
И чутка поближе:
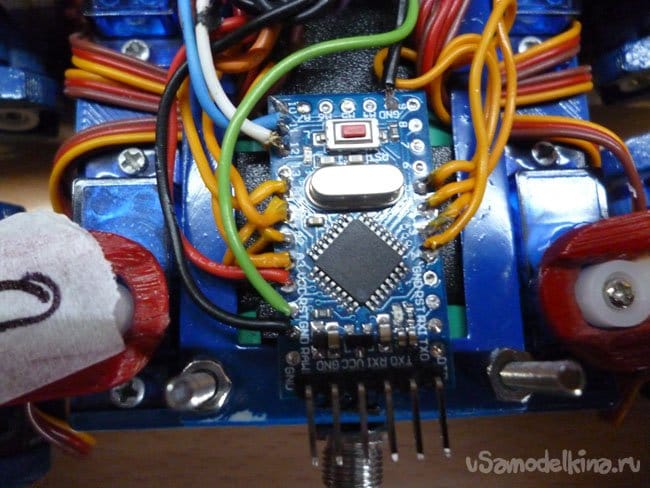
Для подключения Bluetooth модуля нужно вывести коннектор Dunopt 1х4. В нем должны быть плюс от аккумулятора, GND, провода TX, RX. На ардуино Pin 11 –RX, Pin 12 – TX. Подключать надо TX на Bluetooth к пину RX на ардуино, RX на Bluetooth к пину TX на ардуино. Собираем четыре провода в один коннектор и выводим наверх. Bluetooth модули есть разные, распиновка у всех разная, поэтому внимательно смотрите на подписи выводов. Bluetooth модуль клеем на двусторонний скотч:

Шаг 6 Заливка скетча.
Для заливки скетча нужно скачать Arduino IDE с официального сайта.
Нам нужны две библиотеки Servo и SoftwareSerial. Скачиваем и устанавливаем их в среде:
ibre_softwareserial.rar
libre_servo.rar
После этого скачиваем и заливаем скетч:
ard_quadrapinky_bt_ser.rar
Шаг 7 Соединение с пультом управления.
В качестве пульта управления будем использовать изготовленный мною пульт с Bluetooth:

Его можно изготовить по инструкции.
Добавить Bluetooth модуль по следующей инструкции. Так же там подробно описан процесс настройки и соединение модулей на соединение друг с другом.


Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.

