


Здравствуйте, всем хорошего дня. Недавно ко мне в руки попала интересная игрушка. Это интерактивный робот Тобби. Игрушка интересная, робот продается в разобранном виде. Его надо вначале собрать по инструкции, затем уже можно играть. Я помогал собирать этого робота. Процесс сборки интересный, детали сделаны хорошо, а сборка продуманная. Конечно нужна осторожность при работе с ножом, которым необходимо отрезать лишние выступы. На самом роботе стоит 7+, но думаю, что для семилетнего ребенка сборка будет сложной. Ближе к делу. Робота собрали, запустили. У него есть два режима «Преследование» и «Изучение». В режиме «Преследования» Тобби движется за объектом, например, рукой, движущимся перед ним. Во втором режиме «Изучение» робот идет вперед и обходит препятствия. На первый взгляд интересно, но через 30 минут игры надоедает. Сам робот – гексапод, то есть шестиногий, а также в нем есть два белых светодиода, два фотодиода, два инфракрасных светодиода, зуммер, кнопка и два моторчика для движения. «Начинка» хорошая, но крайне скудный функционал. Вот я и решил поместить в Тобби полноценный программируемый контролер. Робот небольшой, поэтому нам понадобиться Arduino Pro Mini 5V. На основе Тобби можно сделать много разных самоделок, но сегодня я остановлюсь на управление Тобби Bluetooth пультом или телефоном на Android. Начнем, список необходимого:
- Робот Тобби от Bondibon
- Arduino Pro Mini 5V 16MHz
- Паяльник, припой, канифоль, провода
- Bluetooth модуль, HC-05 или HC-06
- Кнопка
- Разъемы PLS
- Bluetooth пульт или телефон на Android
- Термоклей
- Двусторонний скотч
- Небольшой Li-ion аккумулятор
- USB-TTL
Шаг 1 Сборка робота.
Прежде всего нам понадобиться робот Тобби. Его можно приобрести в магазинах детских игрушек:

Вырезаем все детали робота. Все выступы, оставшееся от упаковки, необходимо срезать. Если этого не сделать, выступы будут мешать движению робота. Собираем все, кроме пункта «Сборка головы» (страницы с 10 по 16), по инструкции, идущей вместе с Тобби:

Если у вас уже есть собранный робот Тобби, то достаточно раскрутить два самореза, чтобы открыть голову, а затем еще два, для отсоединения платы. Разобравшись с корпусом берем в руки плату контролера Тобби и переходим к следующему шагу.
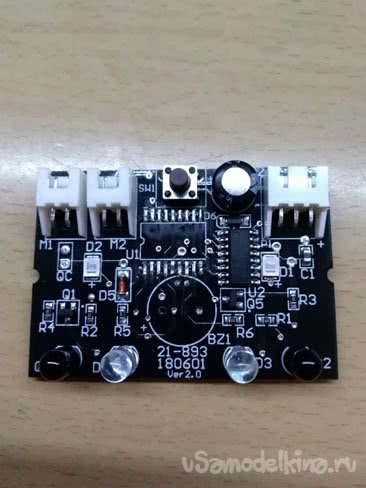
Шаг 2 Модифицируем плату Тобби.
У нашего робота на плате стоит центральный микроконтроллер EM78P259N. У этого чипа стоит OTP ROM (One-Time-Programmable Memory), а это значит, что он прошивается лишь единожды. Поэтому вариант с заменой прошивки отпал сразу.
em78p259n.pdf
В качестве драйвера двигателей используется микросхема MX1208. Ее мы оставим, к ней будет подключать Arduino.
mx1208.pdf
Берем плату и отпаиваем с нее центральный микроконтроллер (микросхема EM78P259N, она посередине). Также рекомендую отпаять на время зуммер. Он мешает добраться паяльником к ножкам микросхемы, и будет мешать потом, при припаивании проводов:

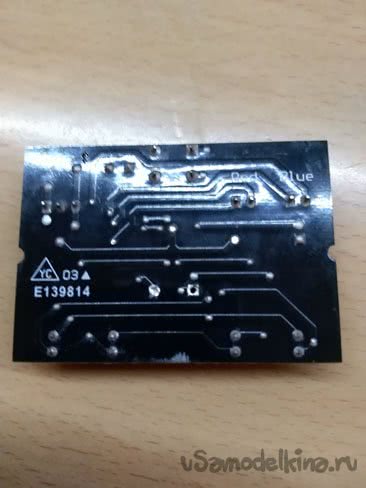
С этой микросхемой уже ничего не сделаешь, поэтому главное выпаять аккуратно, так чтобы не повредить дорожки на плате. Если отломаете ножки микросхеме (EM78P259N) ничего страшного, главное – целые дорожки. С обратной стороны плата тоже должна быть цела:
Теперь берем тонкие провода и припаиваемся к посадочным контактам микросхемы. Нам нужны не все контакты. Провода припаиваем к следующим контактам, чтобы не перепутать номера контактов, смотрите Datashit к микросхеме (у Тобби стоит EM78P259ND18/SO18, то есть 18 контактов) . Или просто запомните, нумерация начинается от нижнего левого контакта, и идет против часовой стрелки. Также будет хорошо, если будете использовать цветные провода, чтобы знать какой к чему ведет или, просто приклейте к проводу кусок малярного скотча с надписью.
1 – левый фотодиод
2 – правый фотодиод
3 – инфракрасная подсветка (два светодиода включаются одновременно)
4 – это RESET микросхемы, к нему припаивать провод не нужно
5 – это Vss микросхемы, к нему припаивать провод не нужно
6 – светодиод левого глаза
7 - светодиод правого глаза
8 – зуммер
9 - припаивать провод не нужно
10 – к драйверу двигателей
11 – к драйверу двигателей
12 – к драйверу двигателей
13 – к драйверу двигателей
14 - это Vdd микросхемы, припаивать провод не нужно
15 - припаивать провод не нужно
16 - припаивать провод не нужно
17 – кнопка
18 - припаивать провод не нужно
Припаиваем все необходимые провода. После пайки проводов, не забудьте припаять на место зуммер. И фиксируем провода термоклеем:

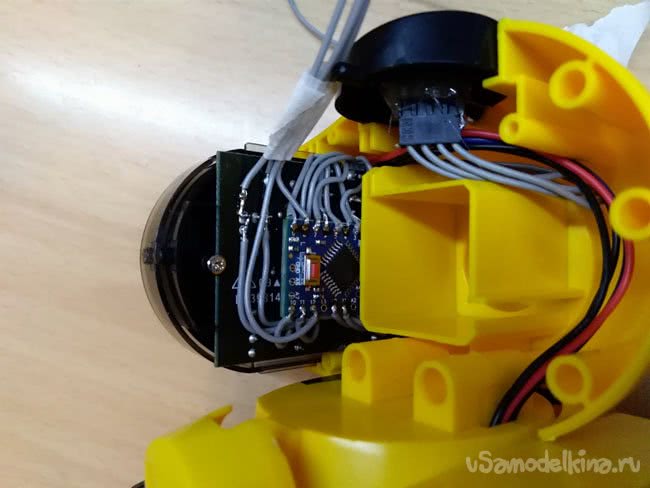
Припаянные провода загибаем и выводим на заднюю сторону платы. Используя двусторонний скотч крепим Arduino на обратную сторону платы Тобби, посередине платы. Теперь необходимо припаять провода к Arduino. GND Arudino припаиваем к минусу от батарейного отсека. А Vin пока не трогаем. Провод для подключения кнопки удобнее брать с обратной стороны платы, также, как и припаять GND к минусу батарейного отсека. Также сразу же стоит припаять к Arduino провода для подключения Bluetooth модуля, а также провод GND (также, как и для Arduino от минуса батарейного отсека) для этого модуля. В общем паяем следующим образом:
Плата Тобби – Arduino
1 – A0 (14)
2 – A1 (15)
3 - D4
6 – D10
7 – D11
8 – D7
10 – D3
11 – D5
12 – D6
13 – D9
17 – D2
«-» - GND
Кнопку, как я уже говорил берем с обратной стороны платы. «-» - это минус от батарейного отсека, также удобно взять с обратной стороны платы. Выводи провода для Bluetooth модуля, их лучше сразу обжать в одну колодку:
Arduino – Bluetooth
D12 – Tx
D8 – Rx
GND – GND
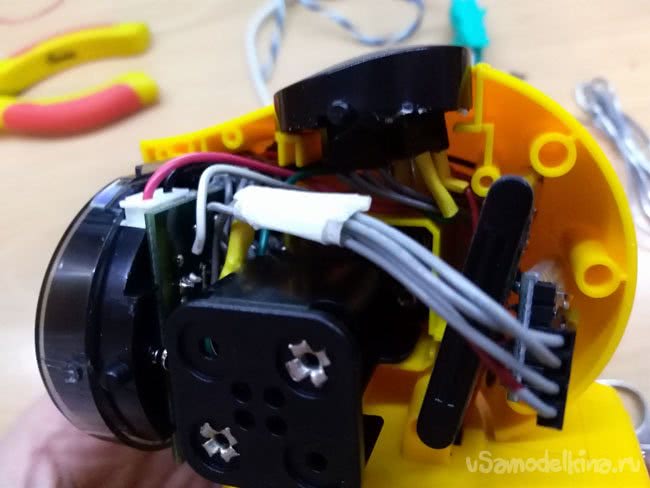
В конечном итоге все должно выглядеть примерно так:

Перейдем к питания нашей электроники. Arduino и Bluetooth модуль скорее всего (мною проверено на практике) будут перегружаться при включении моторчиков из-за просадки напряжения. Поэтому, для решения этой проблемы, мы разделим питание. Питание для Arduino и Bluetooth модуля будем брать от маленького Li-ion аккумулятора. Подойдет аккумулятор от старого телефона. Припаиваем к нему провода и обжимаем концы чтобы получить удобные разъемные соединения:

Минус от аккумулятора припаиваем к минусу батарейного отсека, а плюсовой провод через кнопку, к Vin Arduino и Vcc Bluetooth. Вставляем плату Тобби вместе с Arduino в голову робота:
У нашего Тобби в верхней части головы есть черный кружок со впадиной посередине. В этом месте удобно разместить кнопку включения и колодку для подключения USB-TTL, для заливки скетча. В этой впадине делаем прорезь. В прорезь вставляем выключатель и колодку для заливки скетча. В колодке должны быть следующие провода: GND, Rx, Tx и DTR (или Reset для ручной перезагрузки при заливке скетча). Я специально разместил все это во впадине, практически не заметно, и не портит внешний вид Тобби:

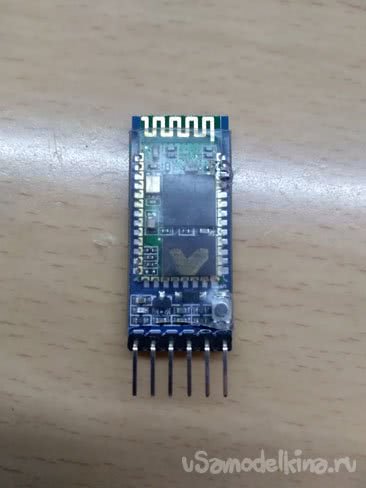
Шаг 3 Подготовка и настройка Bluetooth модуля.
Для управления роботом можно использовать разные способы. Инфракрасный пульт, пульт на 433 MHZ, nRF24L01, Bluetooth или написать автономную программу поведения. Сегодня я остановлюсь на способе управление через Bluetooth канал связи. Для этого нам понадобиться HC-05 или HC-06. Если вы будете использовать пульт с Bluetooth, то у вас должно быть два HC-05 или HC-05 и HC-06. Все потому, что HC-06 может быть только ведомым и не может создавать пары для связи. У меня в пульте стоит HC-06. Вы можете изготовить такой же воспользовавшись инструкцией по изготовлению пульта на основе джойстика от Sega.
И добавить в него Bluetooth модуль, следуя указаниям инструкции.
Я буду использовать свой пульт:

При выборе модуля также обратите внимание что они продаются в двух вариантах. Сам модуль и модуль уже впаянный в специальную плату. Лучше брать второй вариант. Так как на плате уже есть стабилизатор напряжения на 3.3 вольта и удобно выведенные контакты.
Для нашего модуля необходимо провести первоначальную настройку. У меня в пульте стоит HC-06. Поэтому я буду ставить в робота Тобби HC-05 и настраивать его на связь с HC-06, который находиться в пульте. Поэтому я буду писать все команды для HC-05, если у вас другой модуль настройки будут другие. Подключаем Bluetooth модуль к USB-TTL для настройки по следующей схеме:
USB-TTL - Bluetooth
TX – RX
RX – TX
5V – VCC
GND –GND
Теперь нам нужно открыть окно терминала. Можно использовать Arduino IDE. Для начал необходимо выбрать правильный Com-порт во вкладке «Инструменты», «Порт». А затем выбрав пункт меню «Инструменты», открываем «Монитор пота». Для начала проверим, правильно ли мы все сделали. Для этого ставим скорость 38400 (если вы ранее ее не меняли) и ставим параметр отправки NL и CR. Вводим команду:
AT
Должен прийти ответ «ок». Если ответ получен переходим к дальнейшей настройке. Чтобы не путать модуль среди большого количества Bluetooth устройств зададим ему уникальное имя командой:
AT+NAME<имя>
Затем укажем модулю что он будет ведущим:
AT+ROLE=1
И что он должен подключиться только к тому Bluetooth устройству, адрес которого указан командой "AT+BIND":
AT+CMODE=0
И указываем ему адрес устройства, к которому нужно подключиться командой:
AT+BIND:xxxx,xx,xxxxxx
Осталось установить скорость связи в 57600 командой:
AT+UART=57600,0,0
В случае ошибки или если что-то поло не так, введите команду, чтобы сбросить настройки на заводские:
AT+ORGL
Шаг 4 Окончательная сборка.
Собираем все вместе и размещаем в голове робота Тобби. Провода прокладываем через специально предусмотренные для этого пазы:

В самом начале кажется, что нереально впихнуть все это в Тобби. Но если правильно проложить провода все помещается:
Шаг 5 Редактирование и заливка скетча.
Если вы еще не скачали, то скачиваем Arduino IDE с официального сайта:
Скачиваем скетч для робота Тобби, для управления через Bluetooth:
tobby_m_bluetooth.rar
Если вы будете использовать не Bluetooth пульт, а, например, телефон на андроиде, то надо скачать приложение с Google Play. Таких приложение много, на мой взгляд самое удобное Arduino Bluetooth Control.
Настраиваем приложение на следующие команды:
W – Вперед
S – Назад
A – Поворот налево
D – Поворот направо
F – Стоп движение
G – Стоп движение
K – включить «глаза»
L – выключить «глаза»

Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.
