Всем привет! Я вдохновился на создание своего BEAM-робота, насмотревшись на подобные одномоторные и двухмоторные чудеса робототехники в интернете. Идея была создать шагающего робота, ступающего так же, как и 1- или 2-моторные BEAM-ходуны. После нескольких неудачных экспериментов я все-таки сделал, что хотел!
[media=http://www.youtube.com/watch?v=Gih4p6f6pdA]
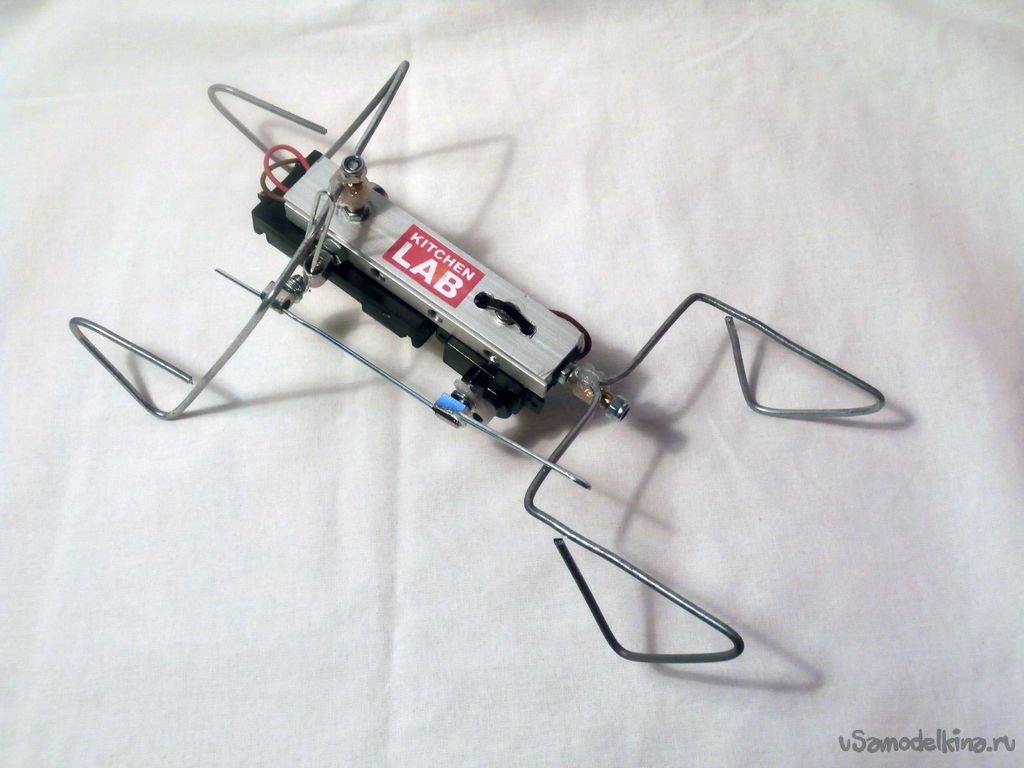
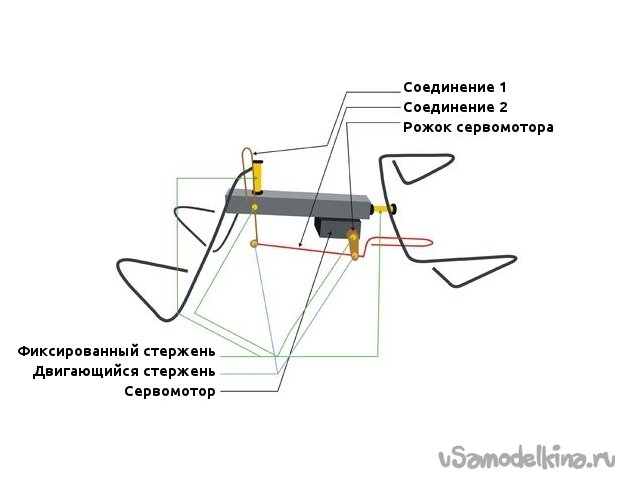
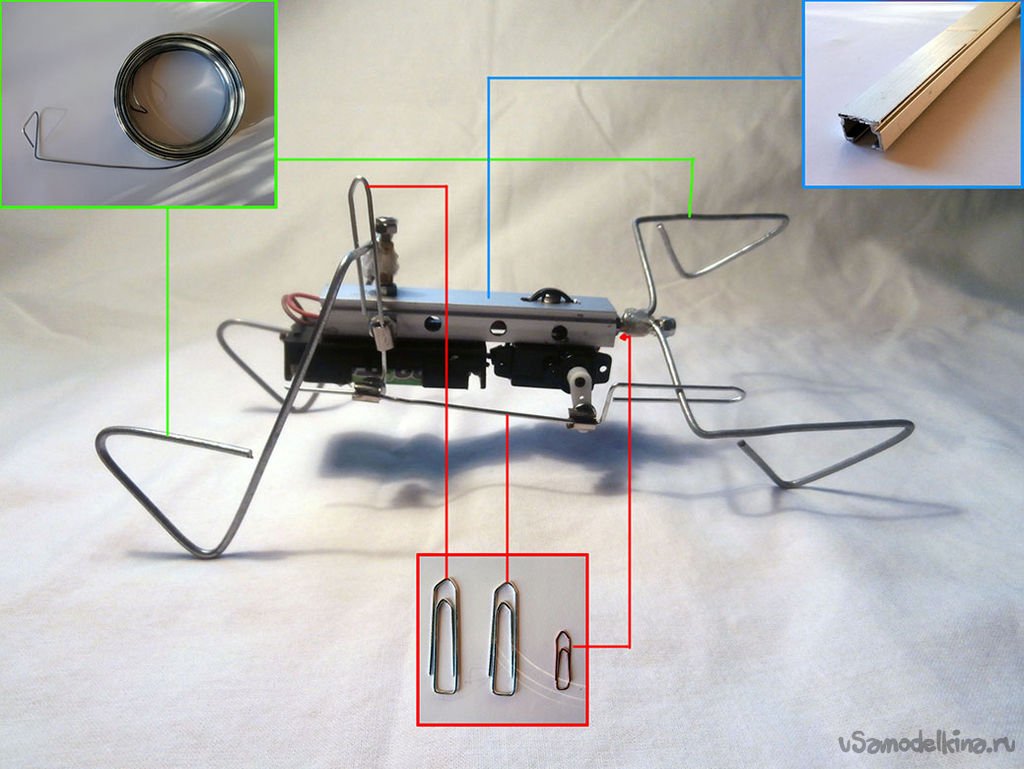
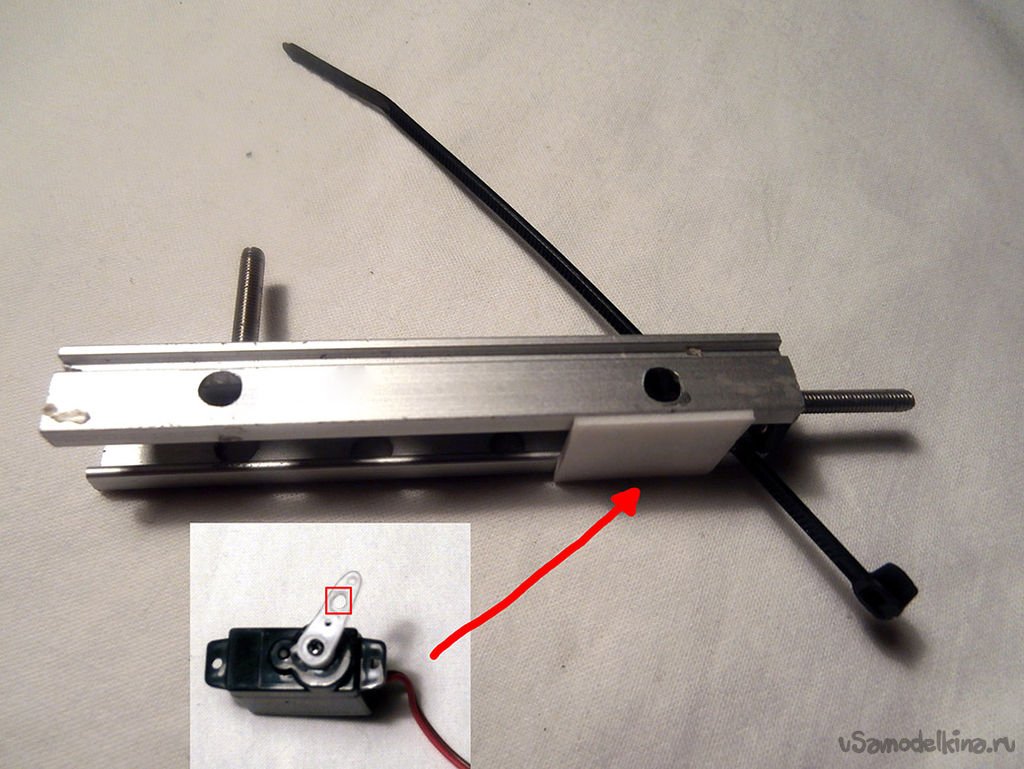
Шаг 1: Механизм
Шаг 2: Необходимые запчасти





(1x) сервопривод непрерывного вращения
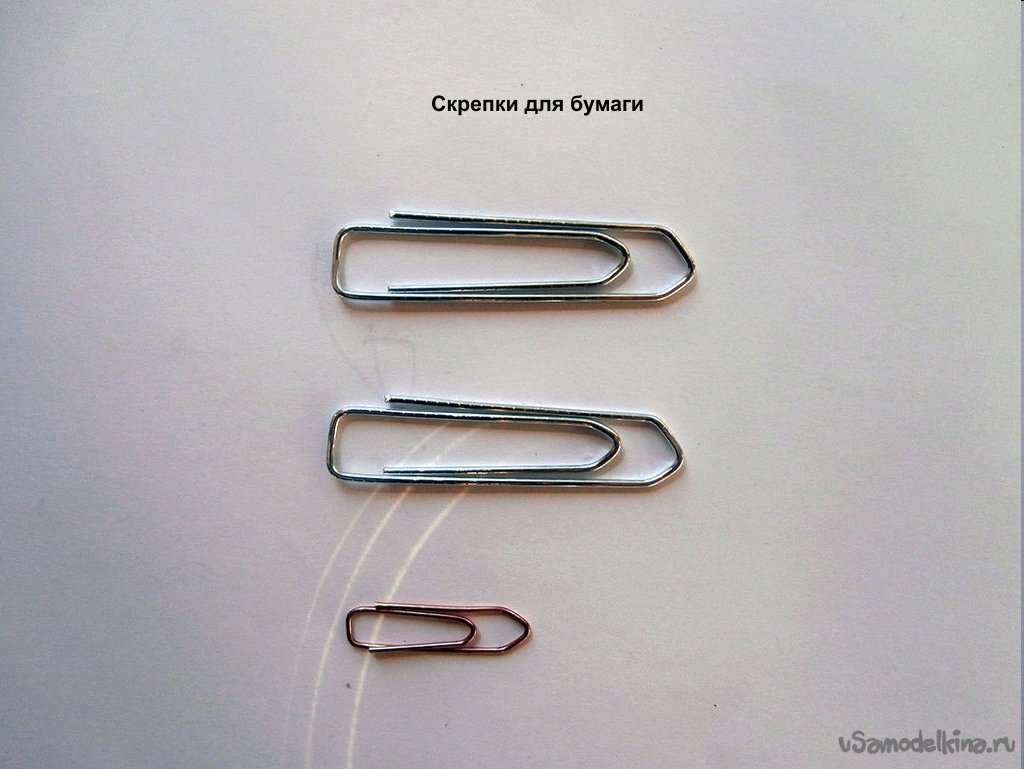
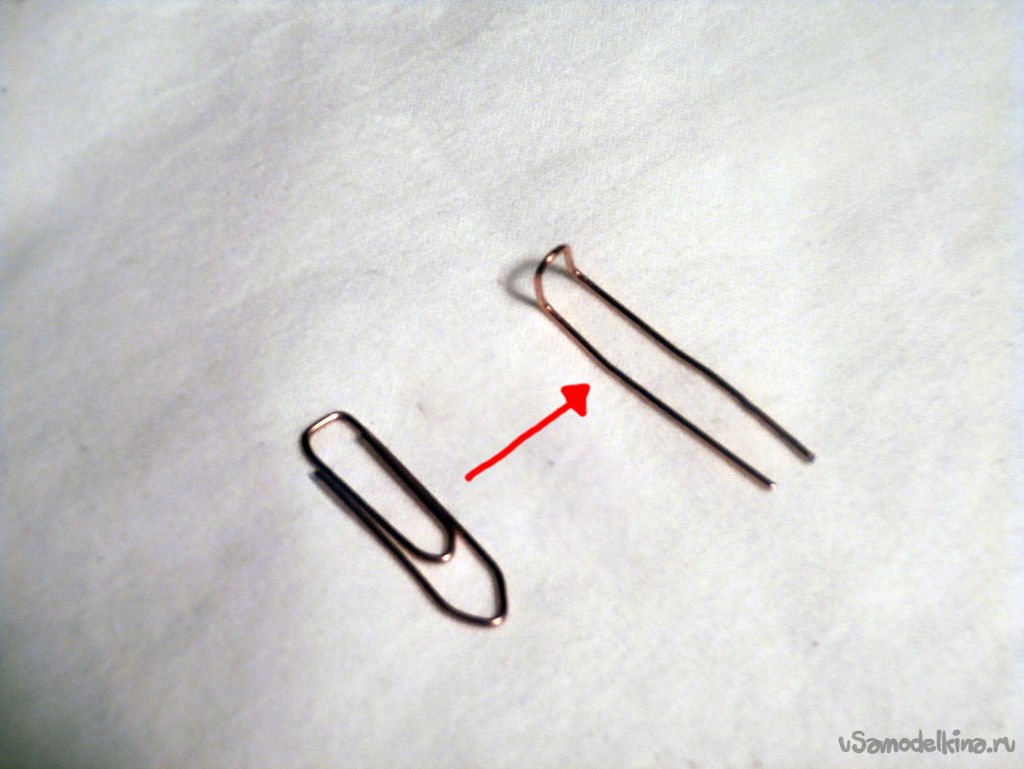
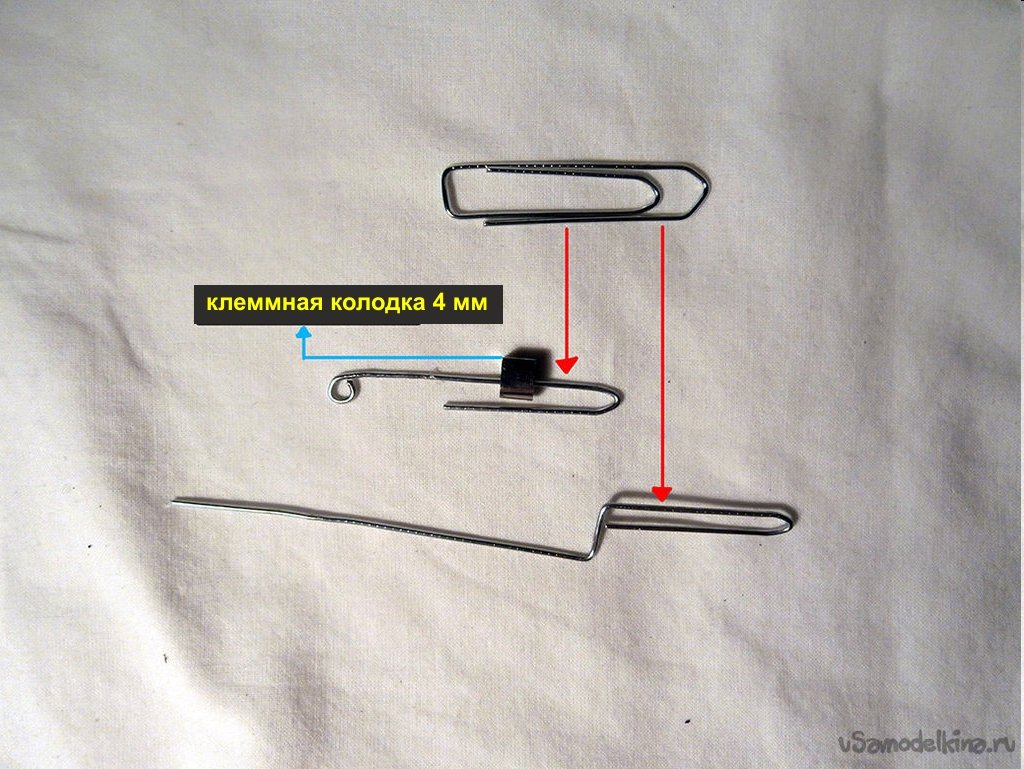
(2x) крупные бумажные скрепки
(1x) маленькая бумажная скрепка
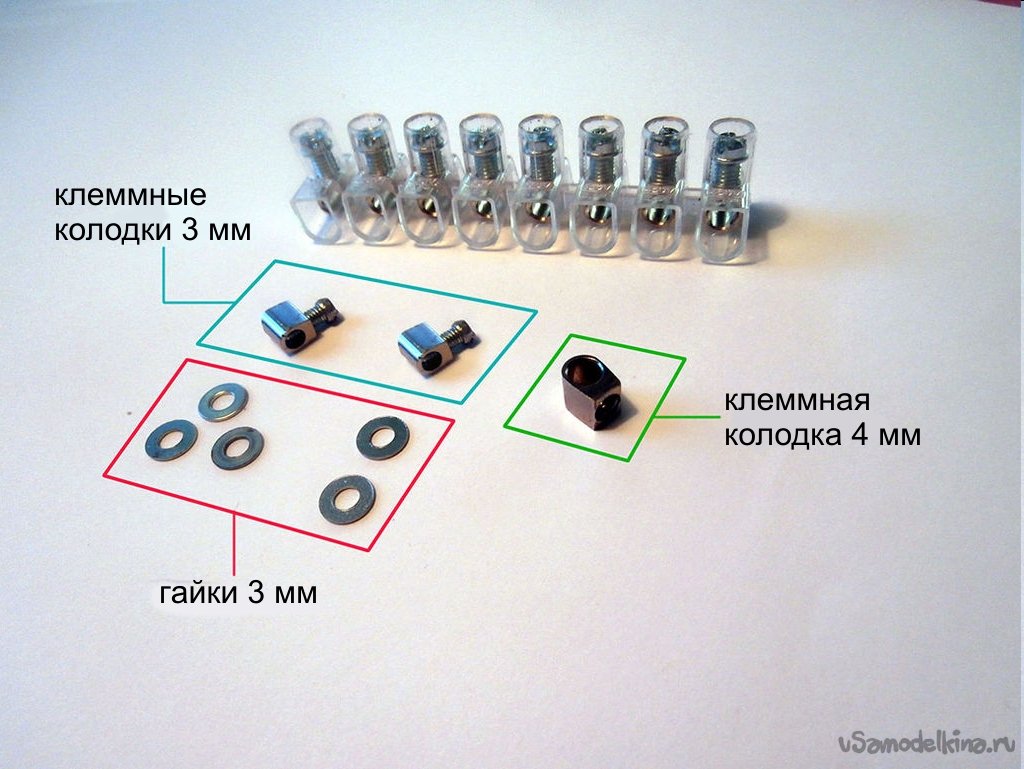
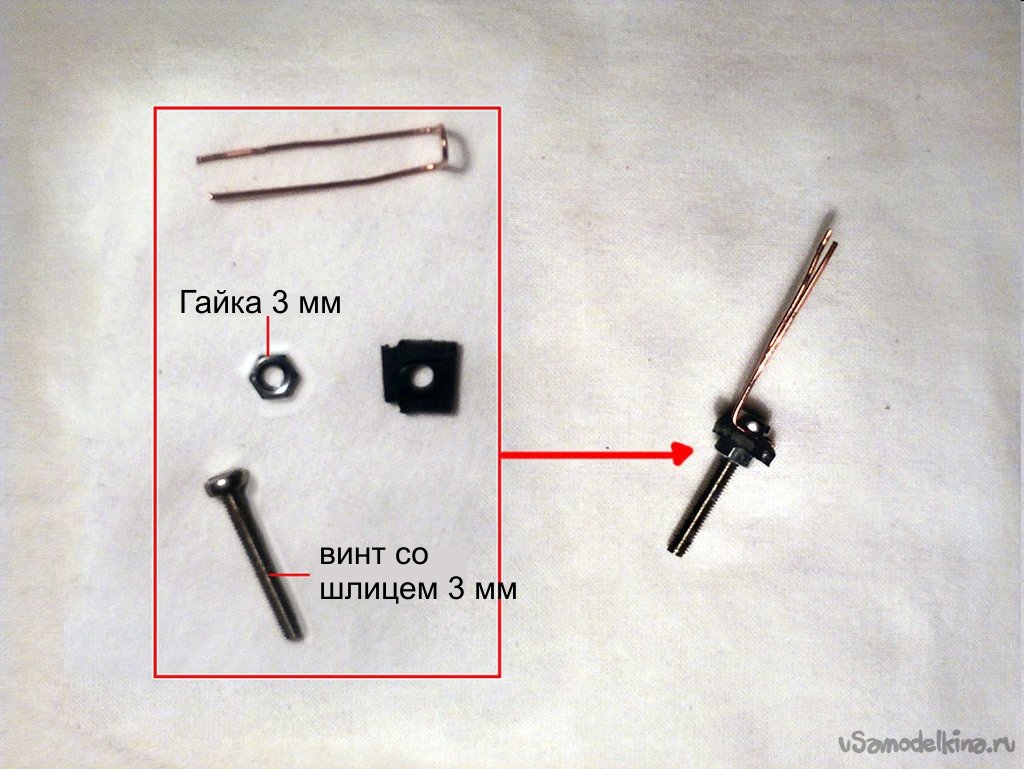
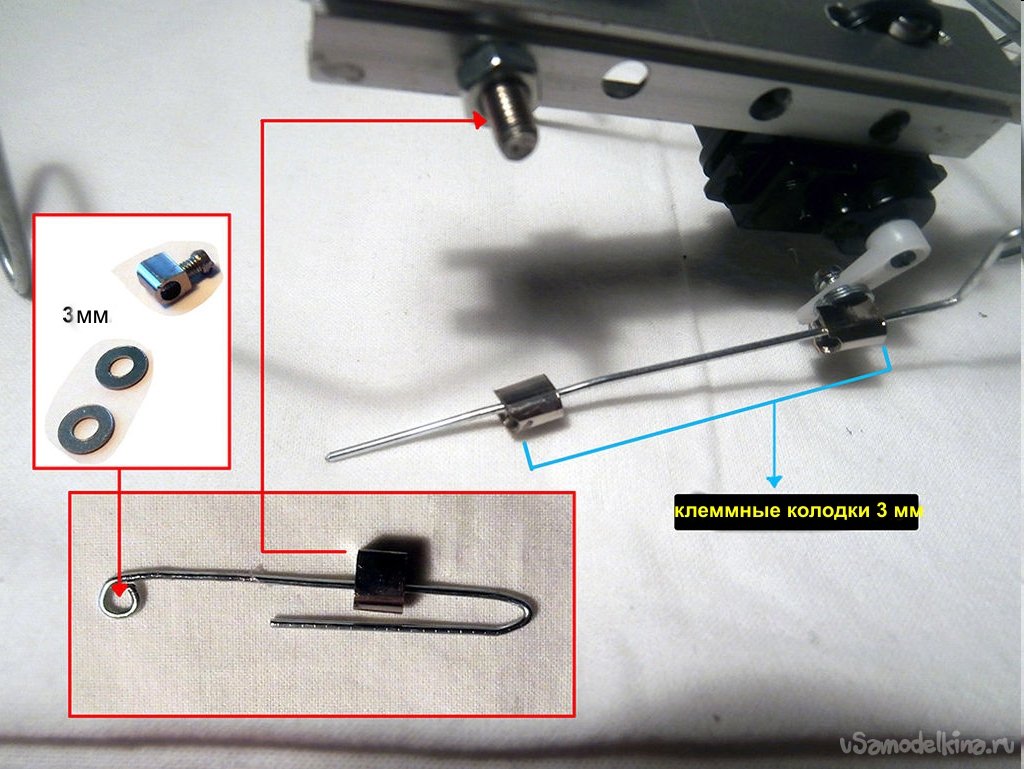
(2x) клеммные колодки (3мм)
(1x) клеммные колодки (4мм)
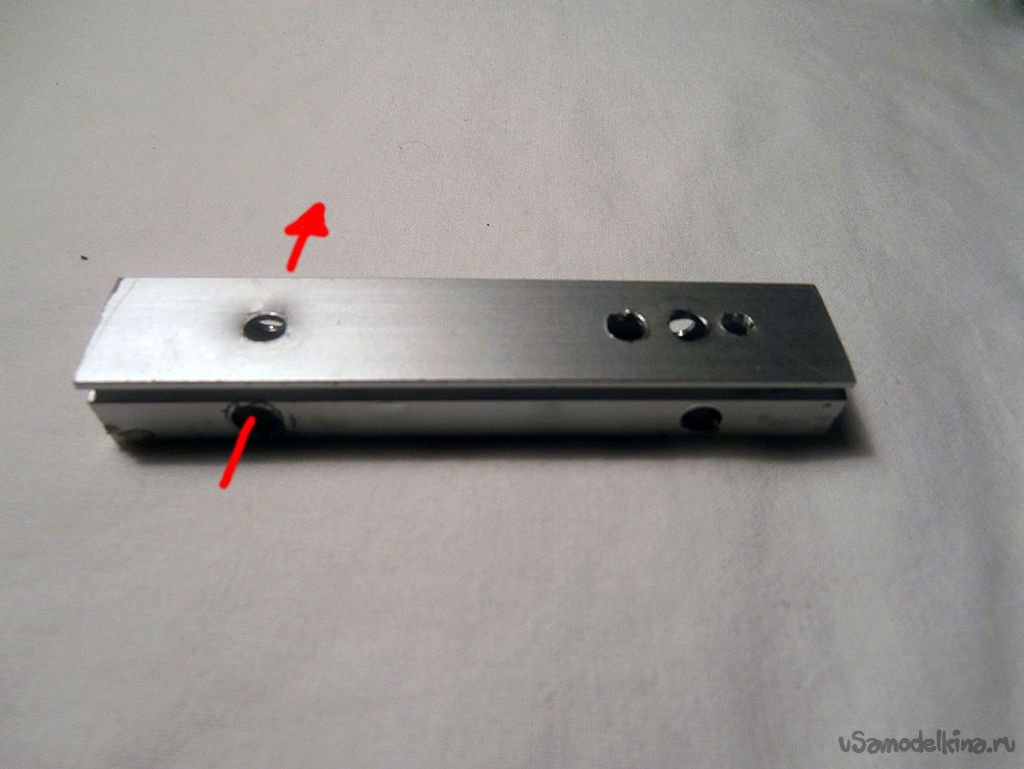
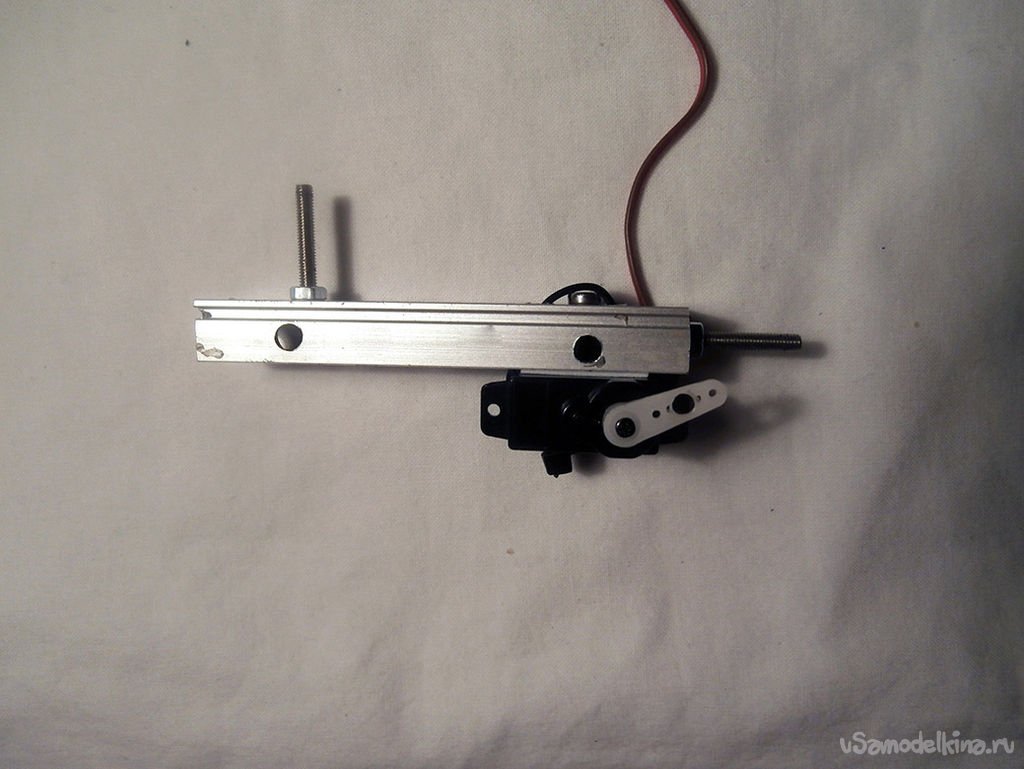
(1X) БУ-шный алюминиевый профильный брусок
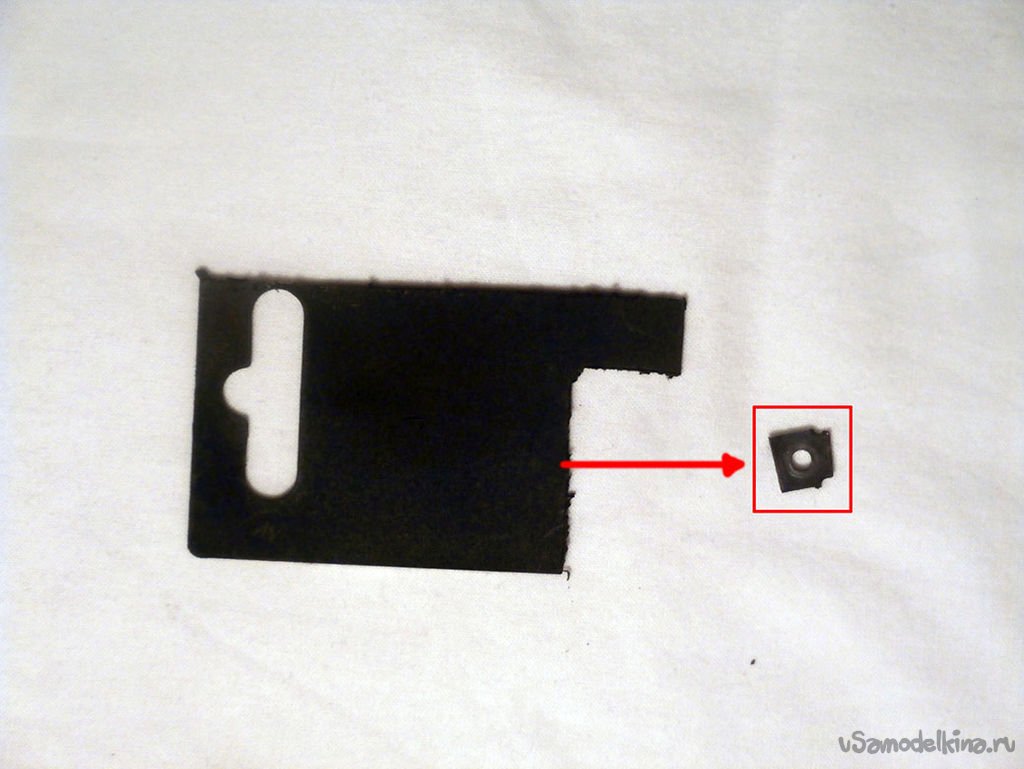
(1X) кусок пластика
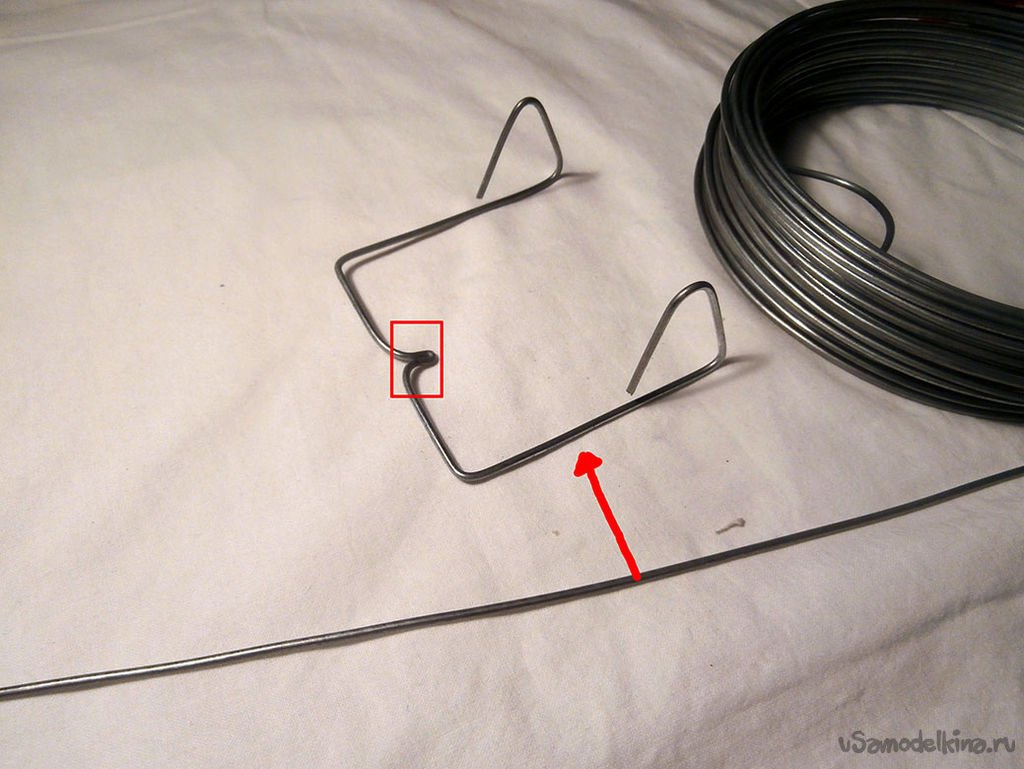
Стальная проволока (2 мм)
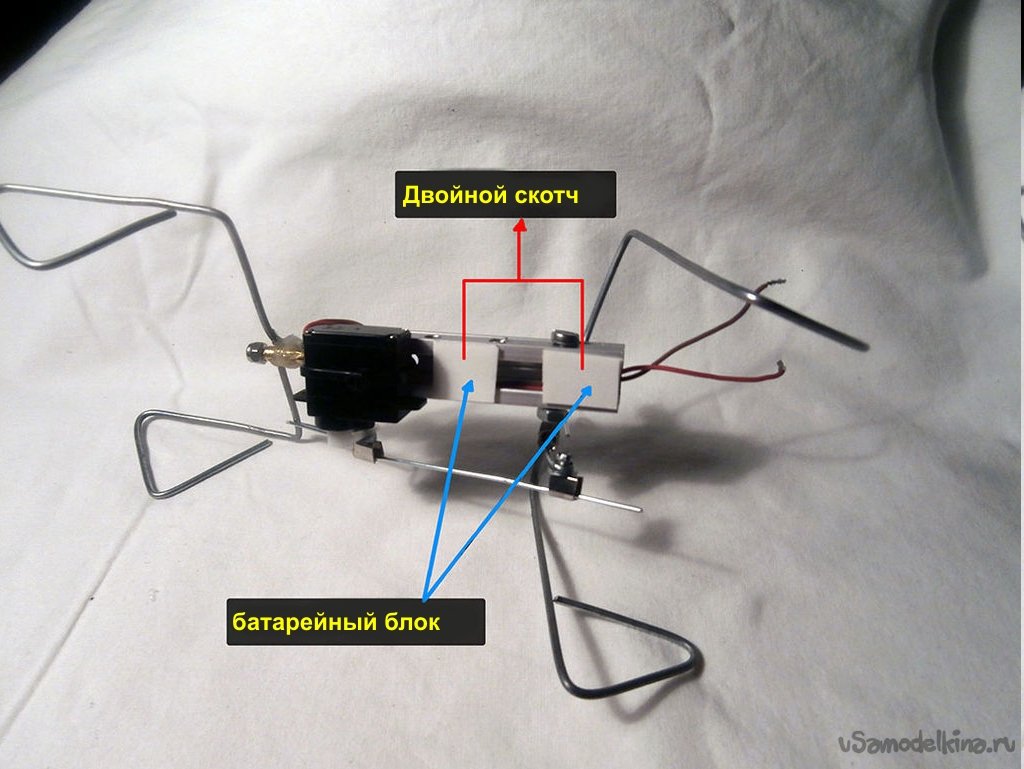
Двойной скотч
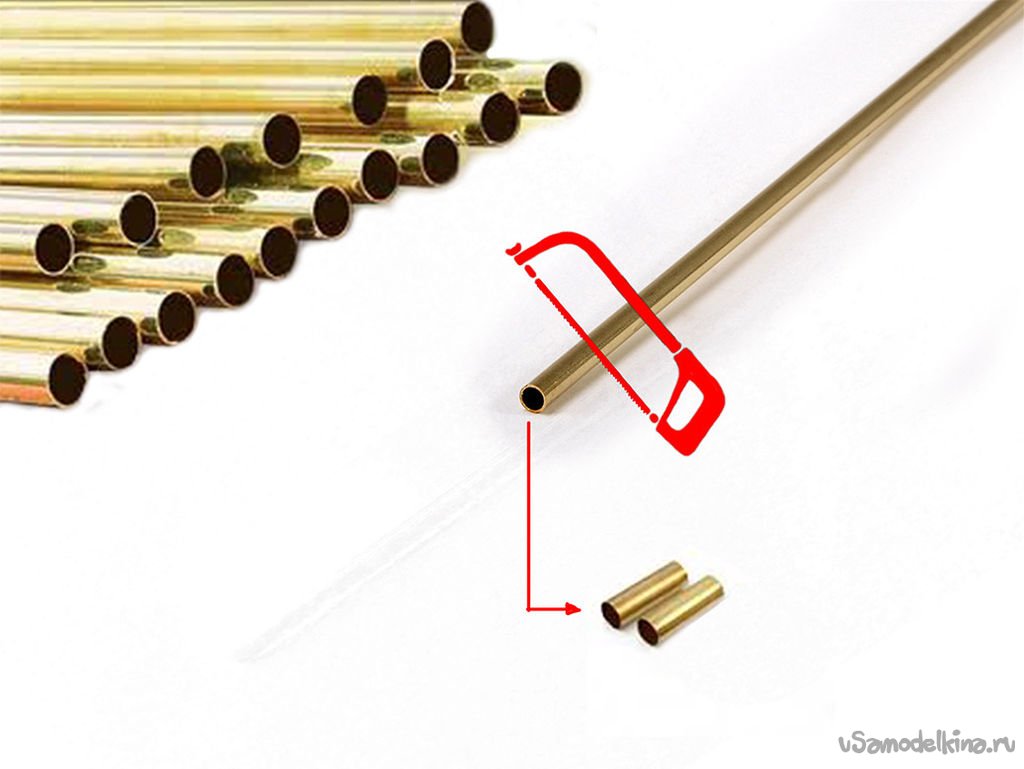
Латунная трубка
(1X) маленький хомут
(1X) батарейный блок (2 x AAA)
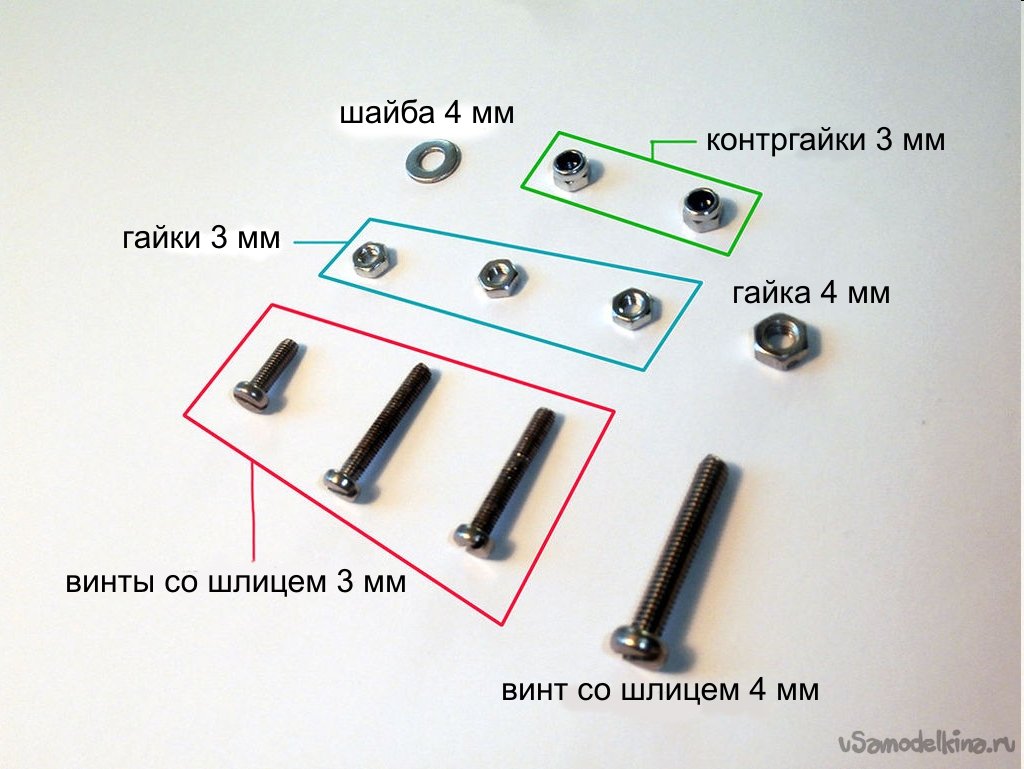
(2X) контргайки (3 мм)
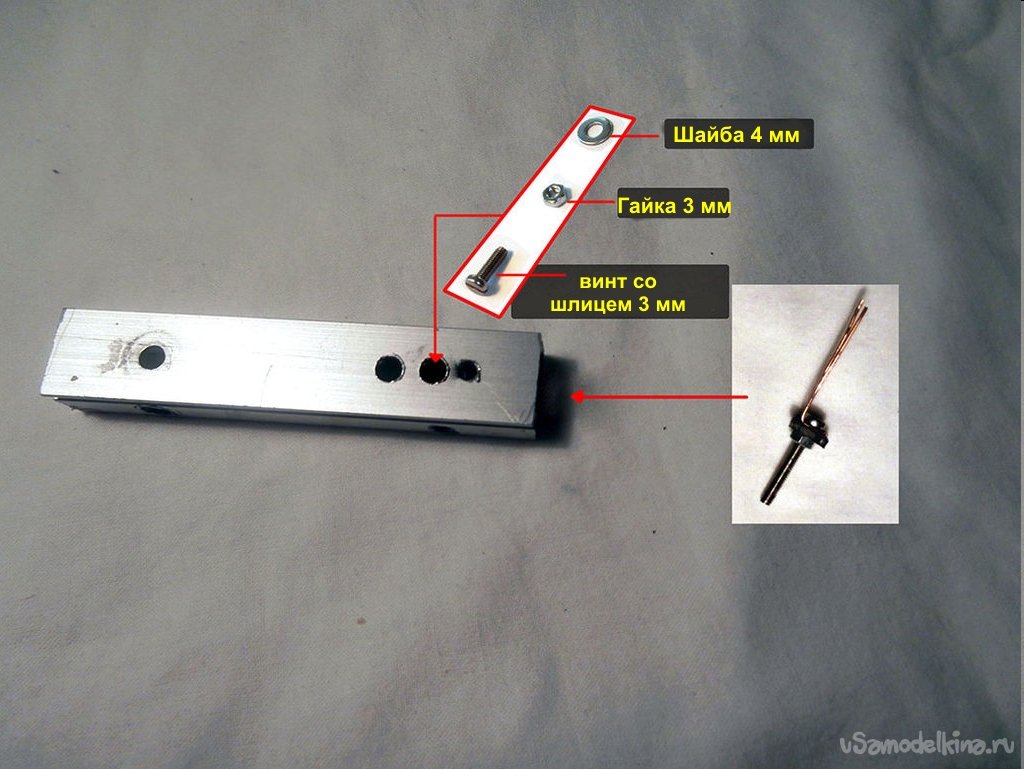
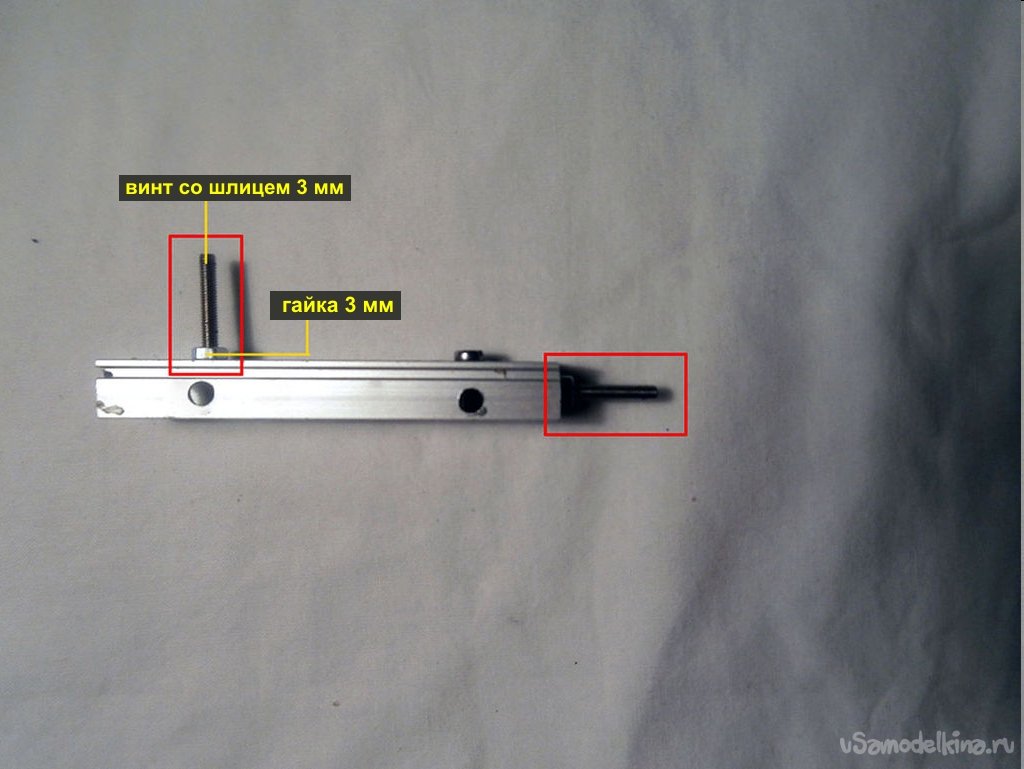
(3X) гайки и шурупы (3 мм)
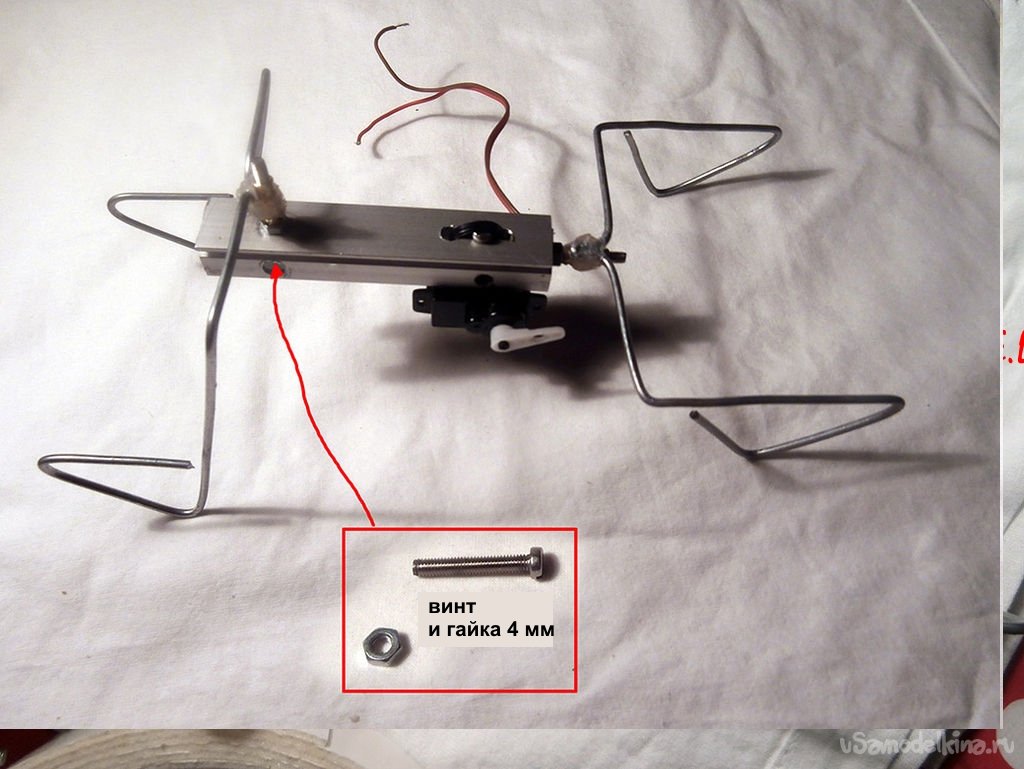
(1x) гайки и шурупы (4 мм)
(5x) шайба (3мм)
(1X) шайба (4мм)
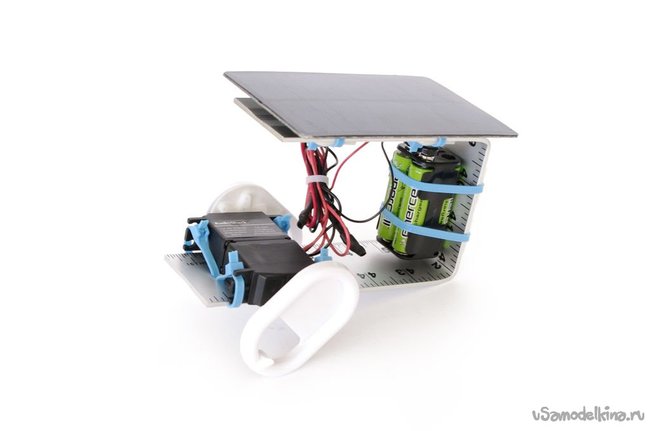
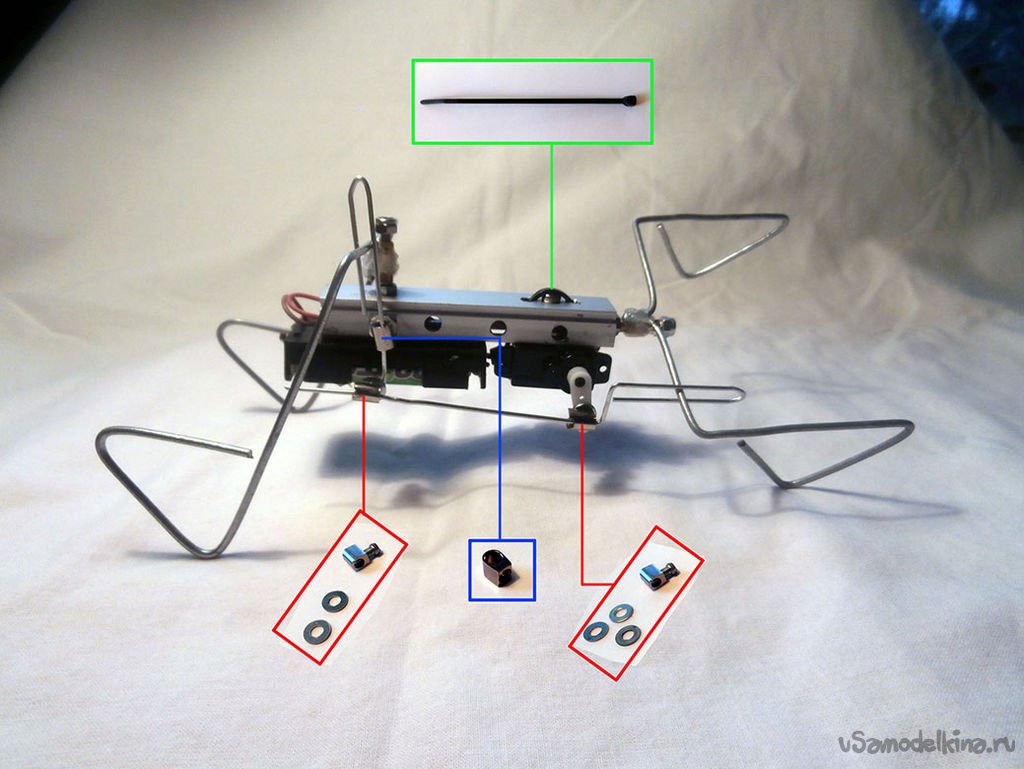
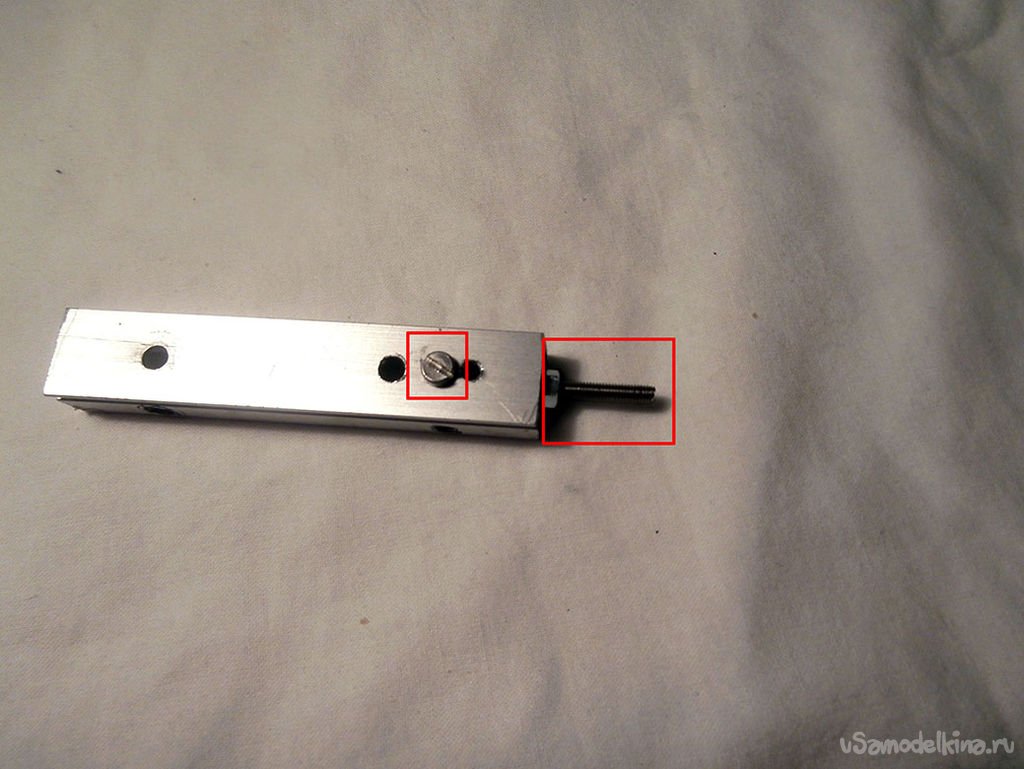
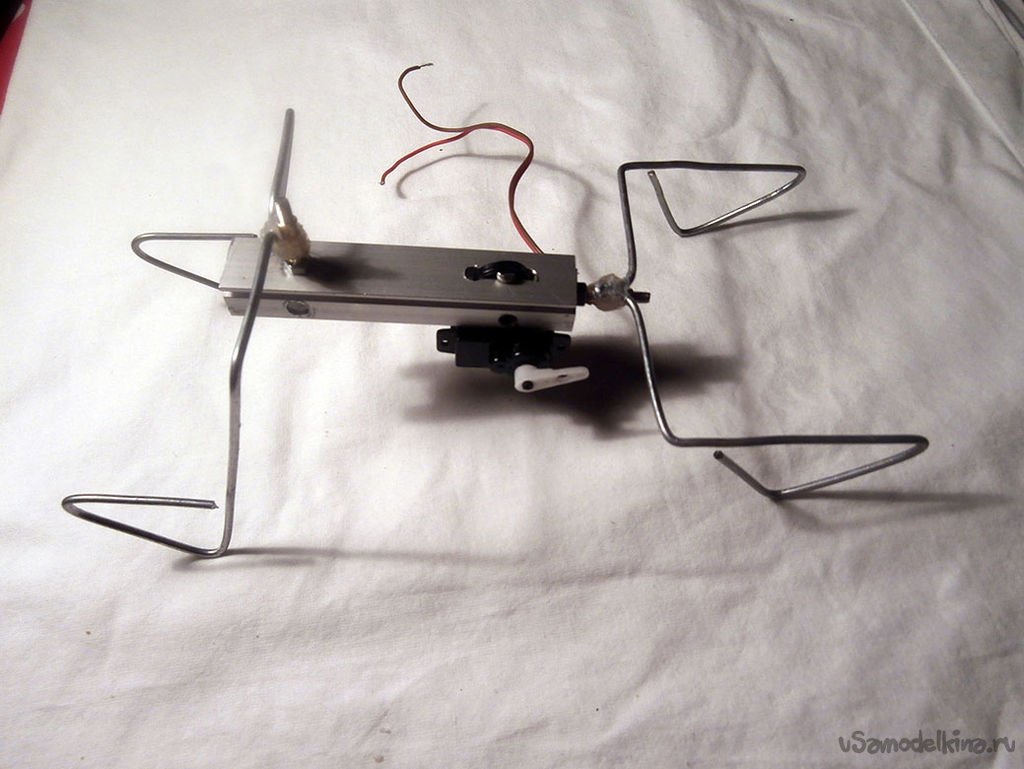
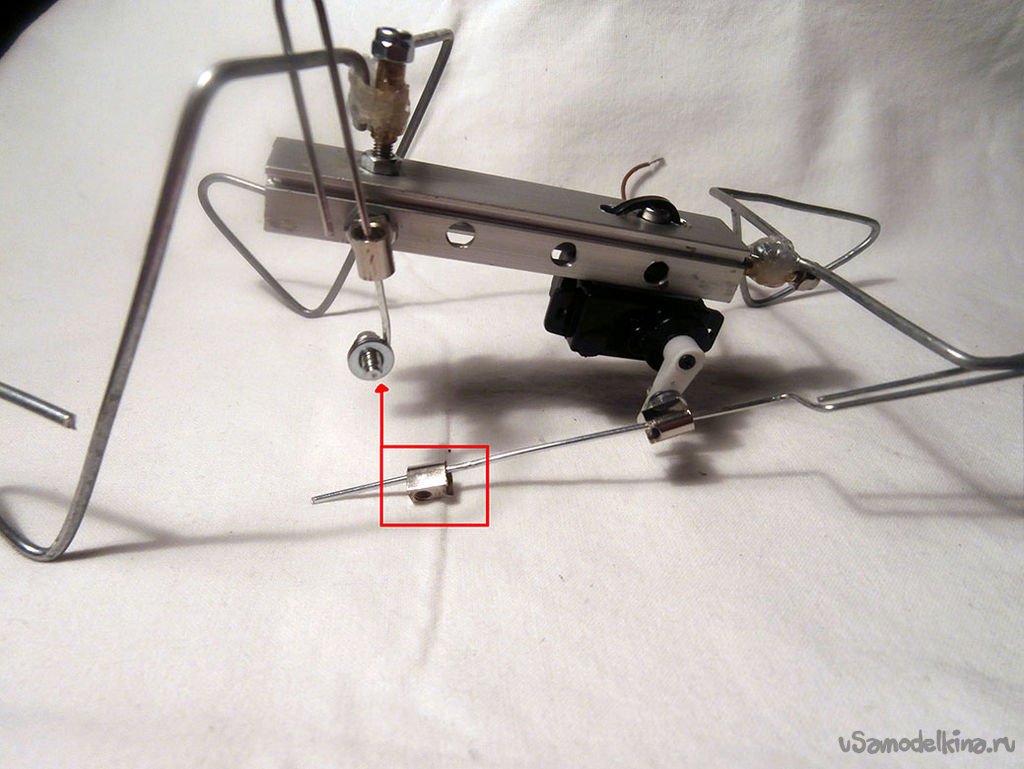
Шаг 3: Сборка запчастей

Шаг 4: Инструменты
Шаг 5: Корпус



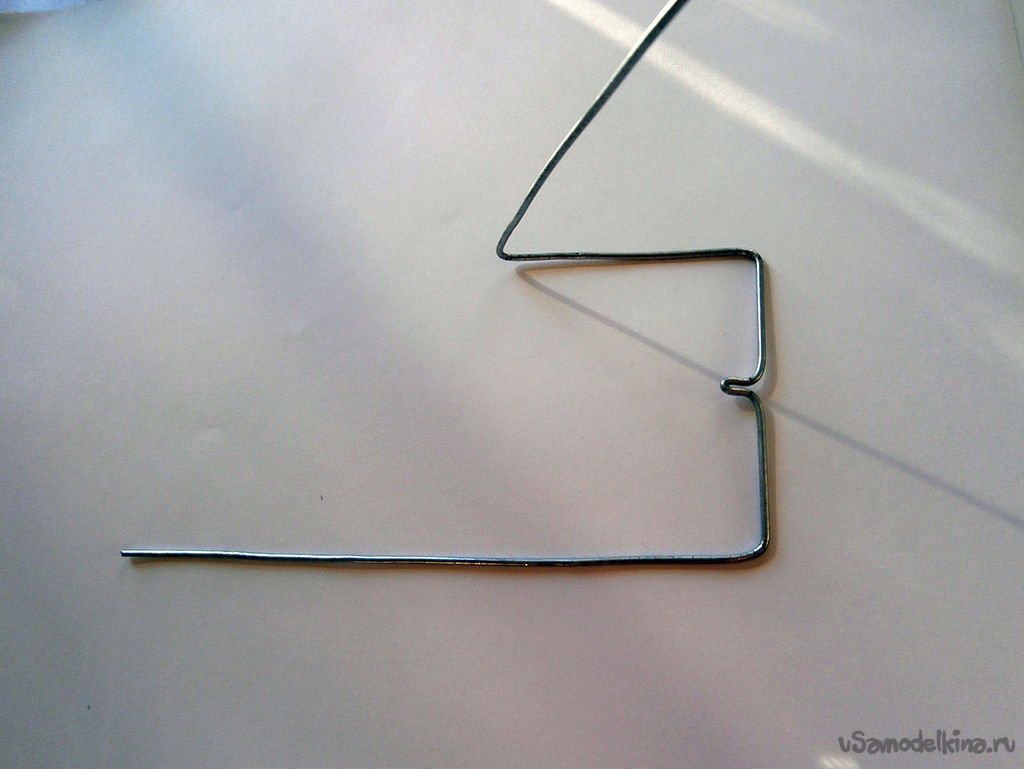
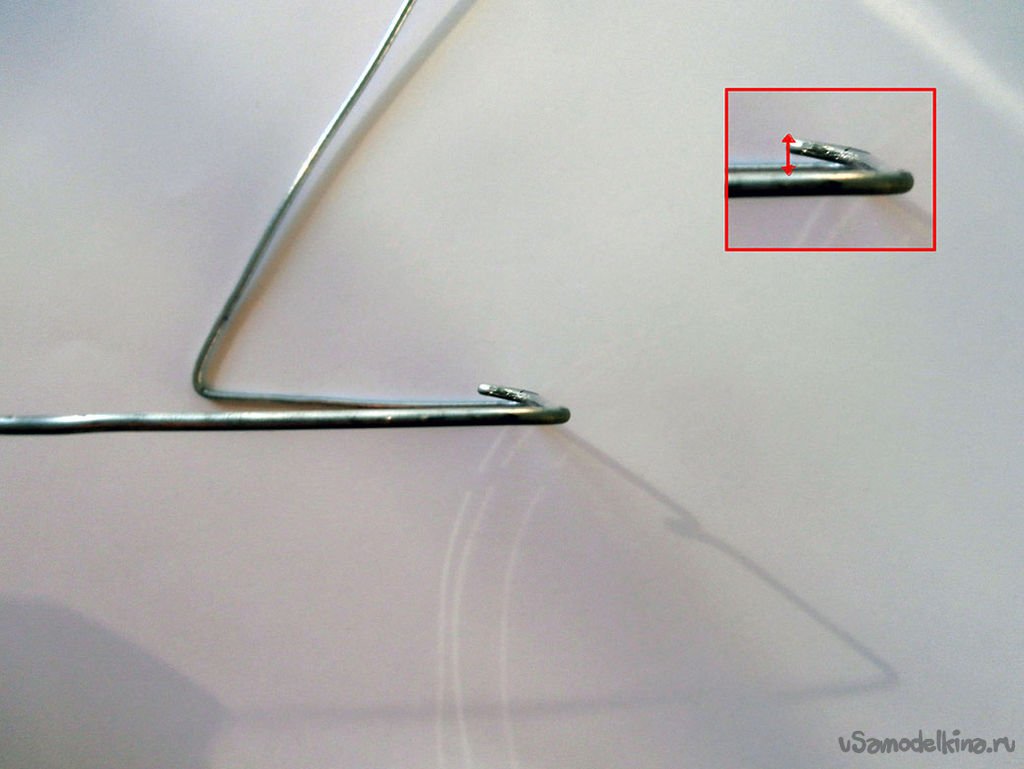
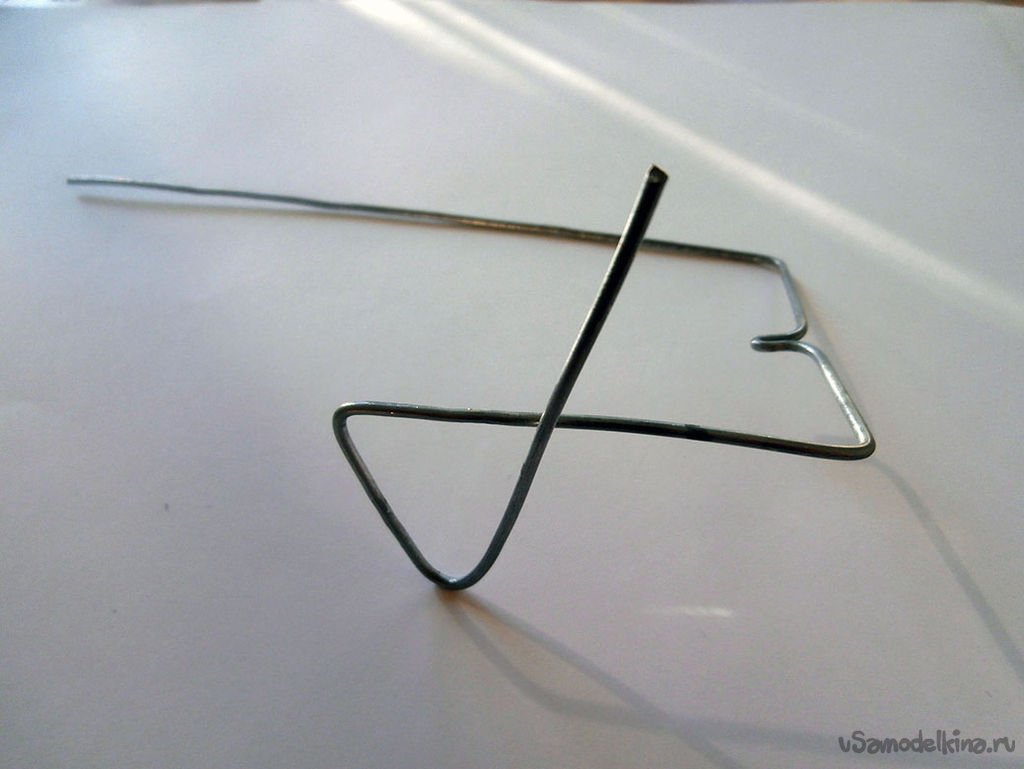
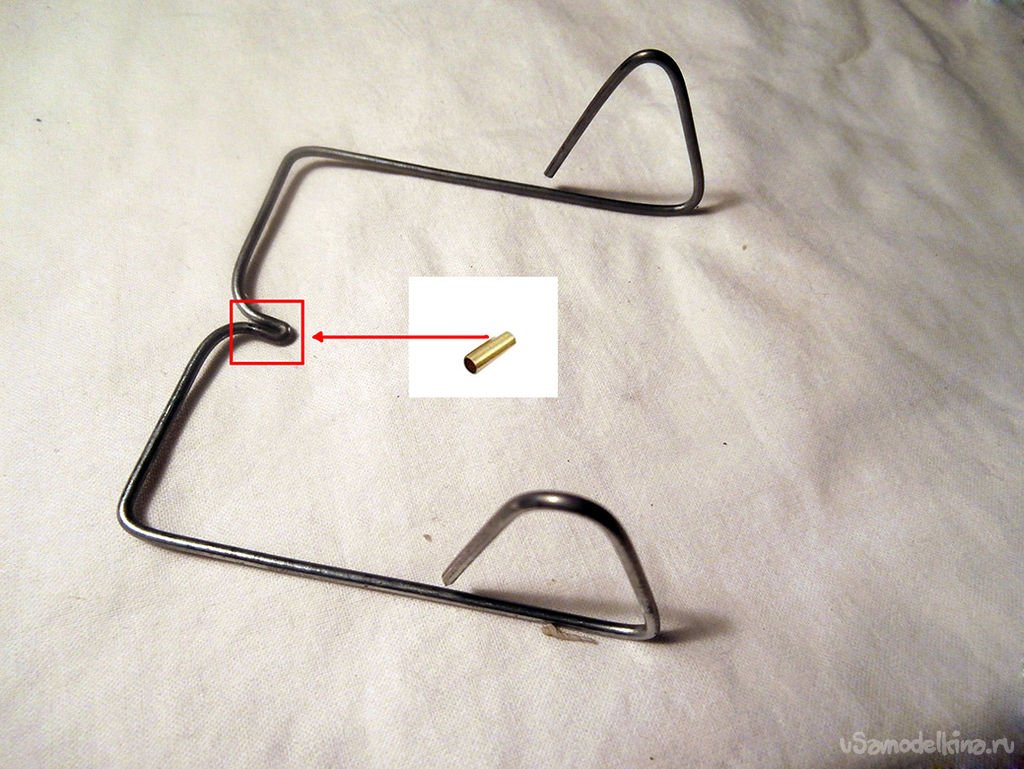
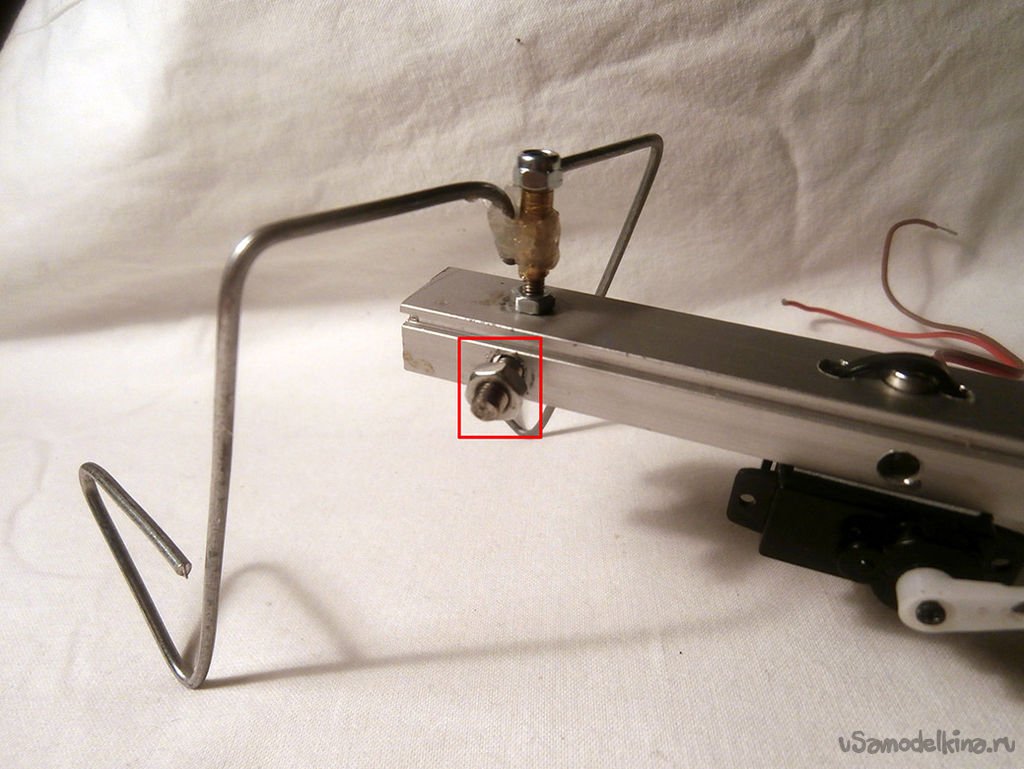
Шаг 6: Передние ноги
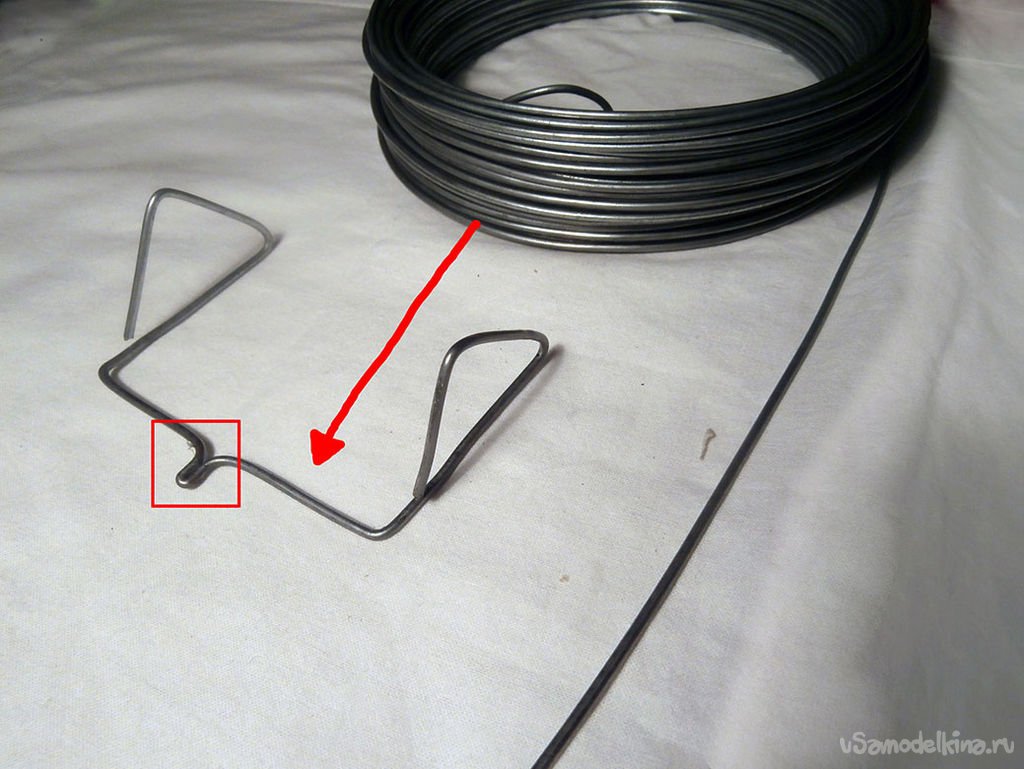



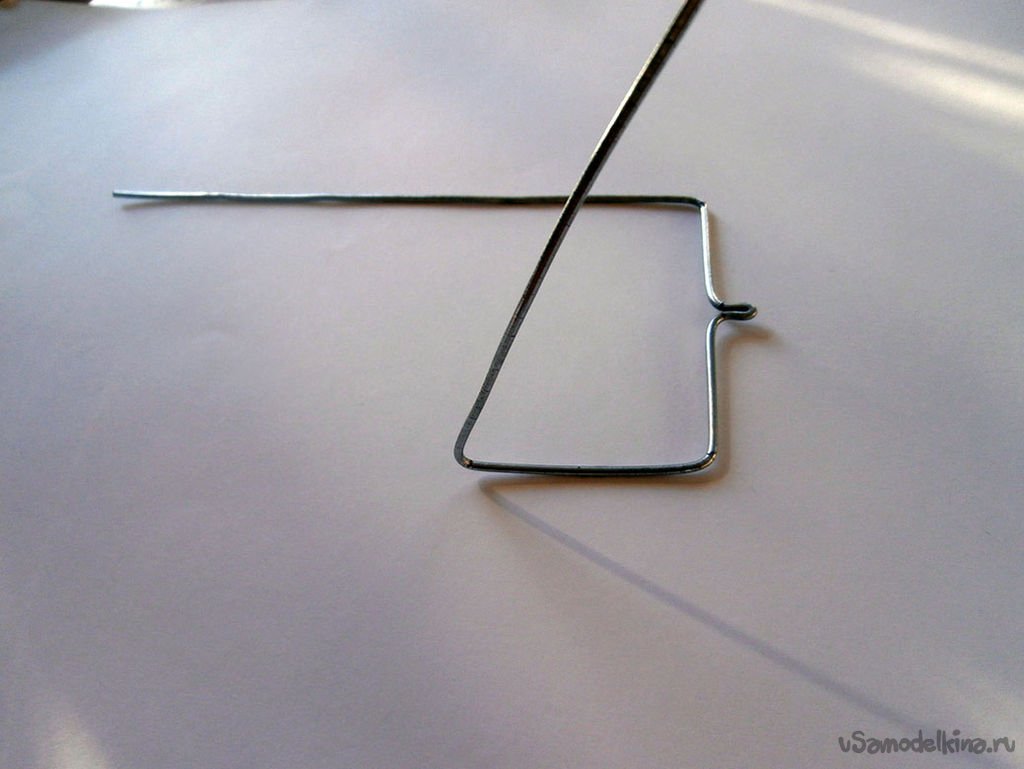
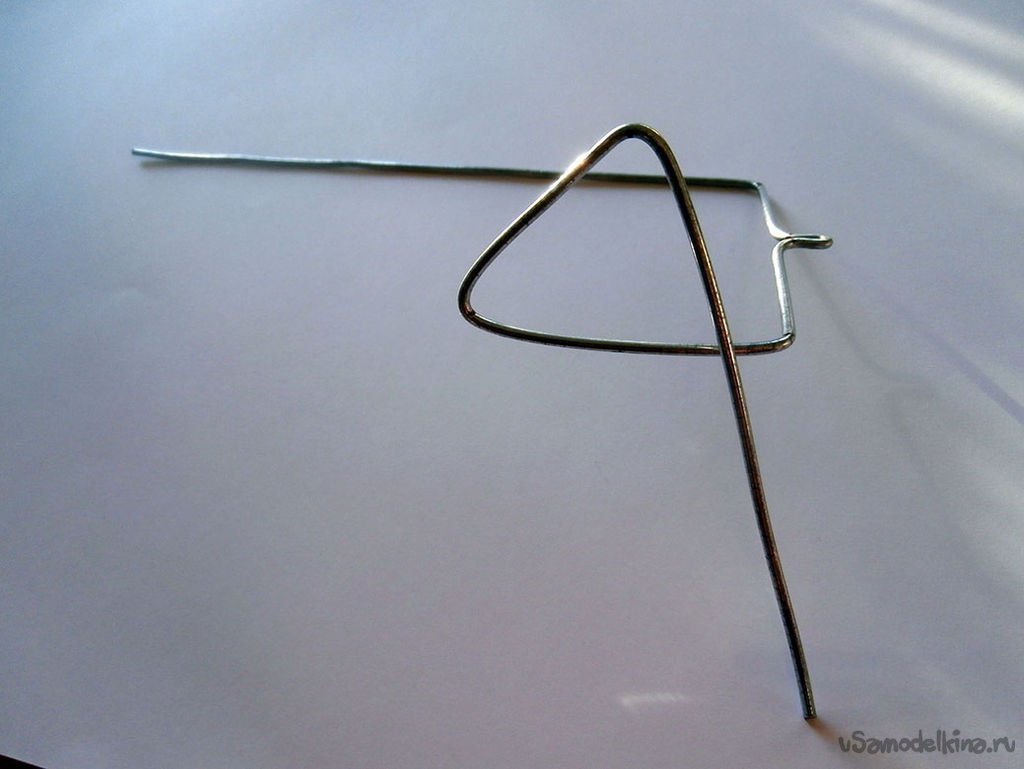
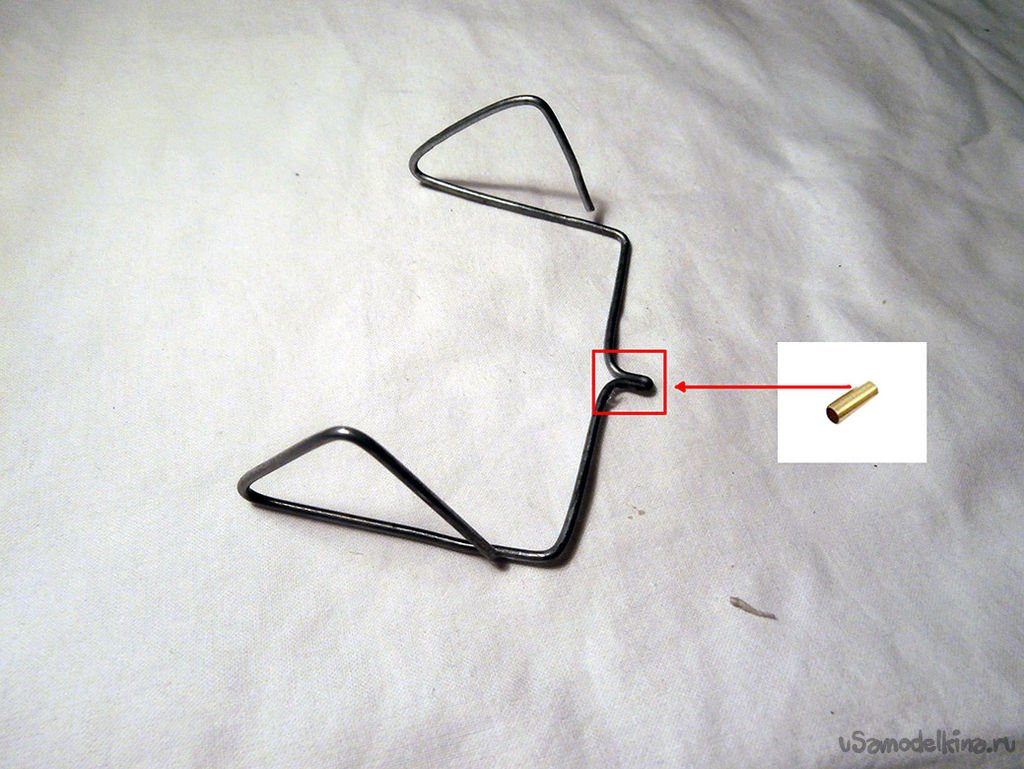
Шаг 7: Задние ноги



Шаг 8: Крепление ножек
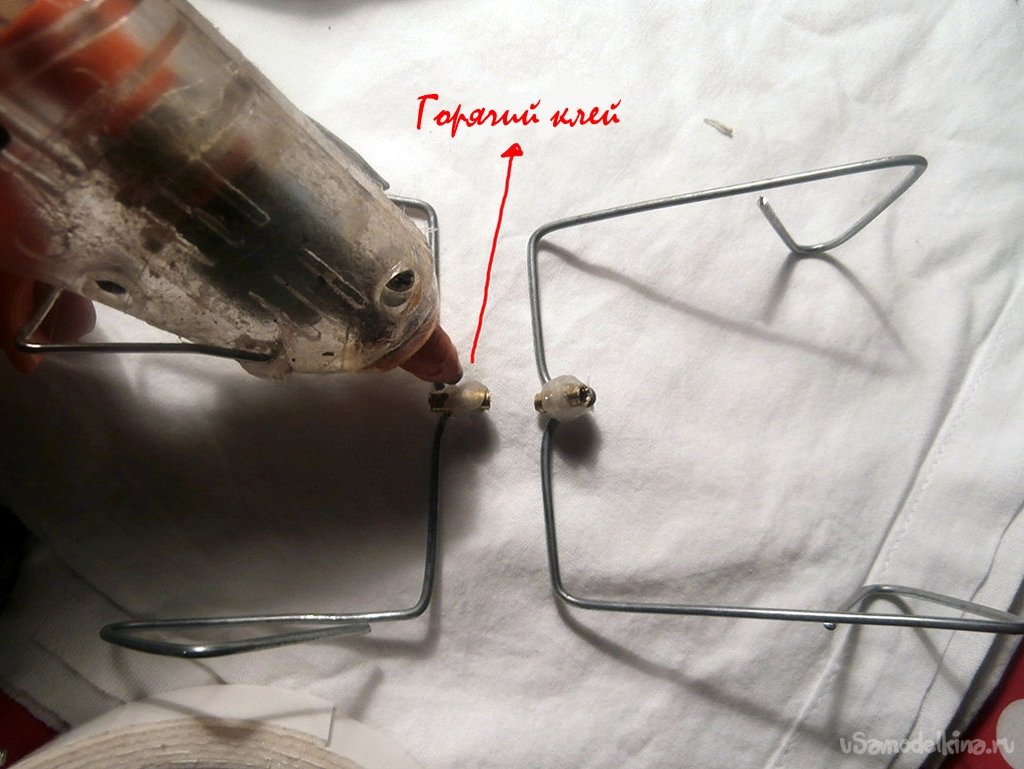
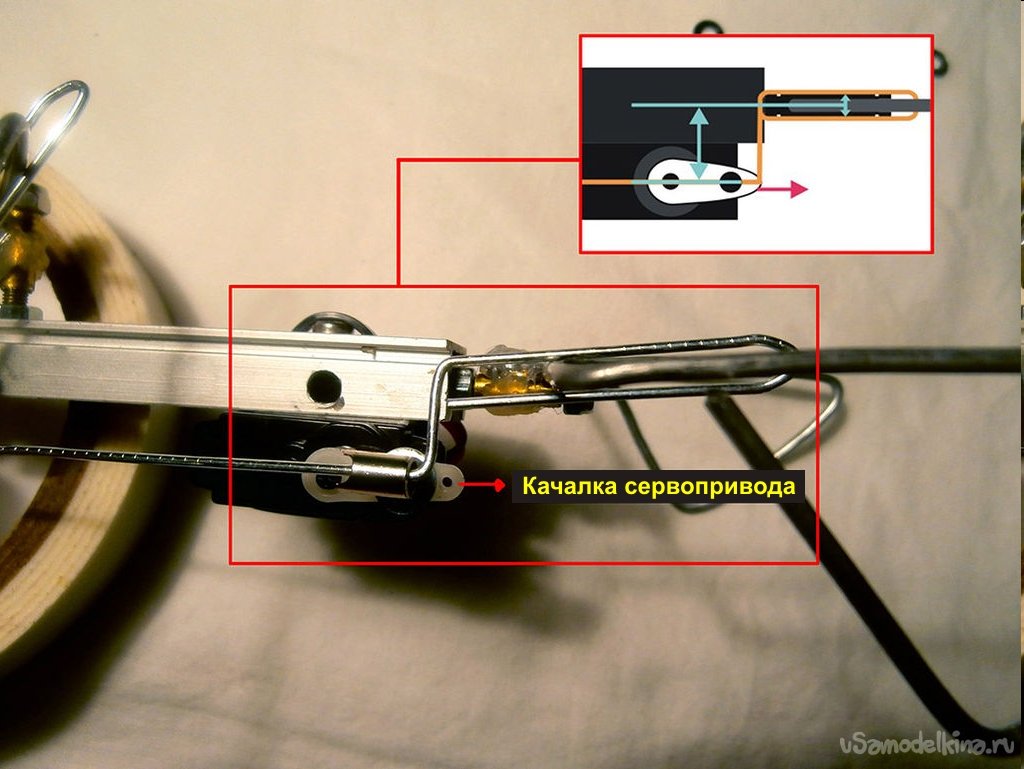
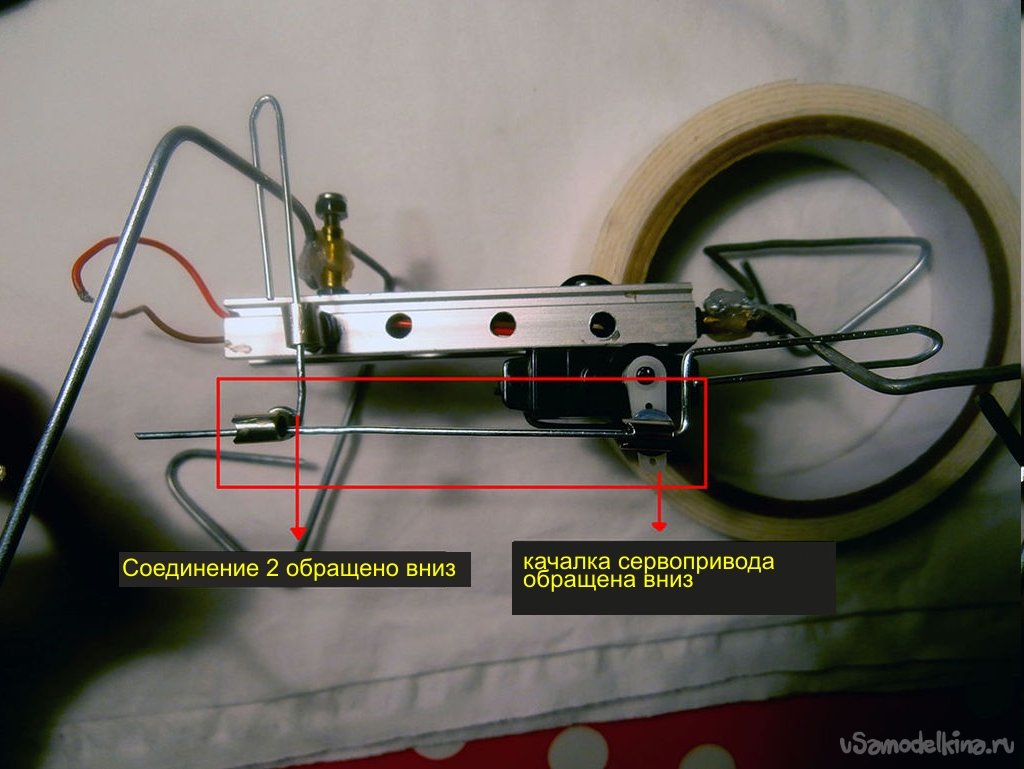
Шаг 9: Сцепление

Шаг 10: Крепление сцепления
Шаг 11: Последние штрихи
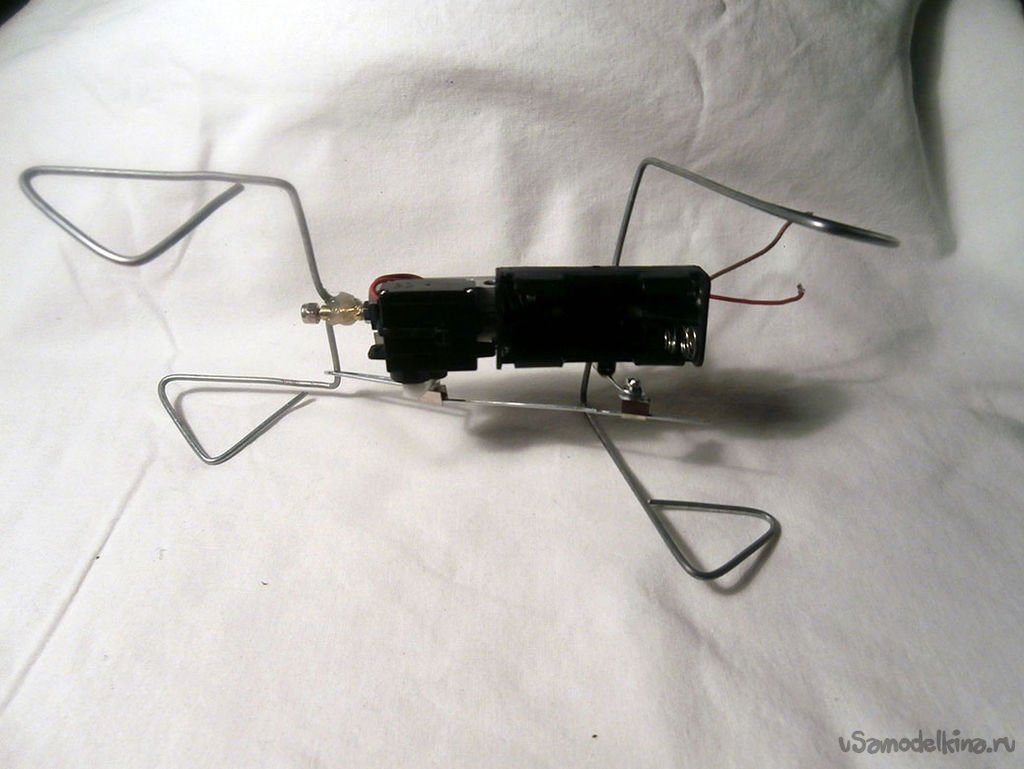

В конце просто соедините проводом сервопривод и батарейки, и робот начнет сове путешествие по вашему дому : )
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.