Приятного времени суток, друзья! В этой статье я Вам расскажу и покажу действующую модель кибер-робота которая может не только разговаривать голосом оператора повторяя его слова, но а так же объезжать препятствия на своём пути!
Материалы и инструмент:
- гусеничная платформа -2шт. (Взяты из сломанного игрового набора "Танковый бой")
- пластмассовые колпачки от зубной пасты -2шт.
- супер клей
- алюминевые заготовки
-готовые электронные модули + свои наработки
- дрель
- напильники
И так приступаем:
Часть 1. "Механика"
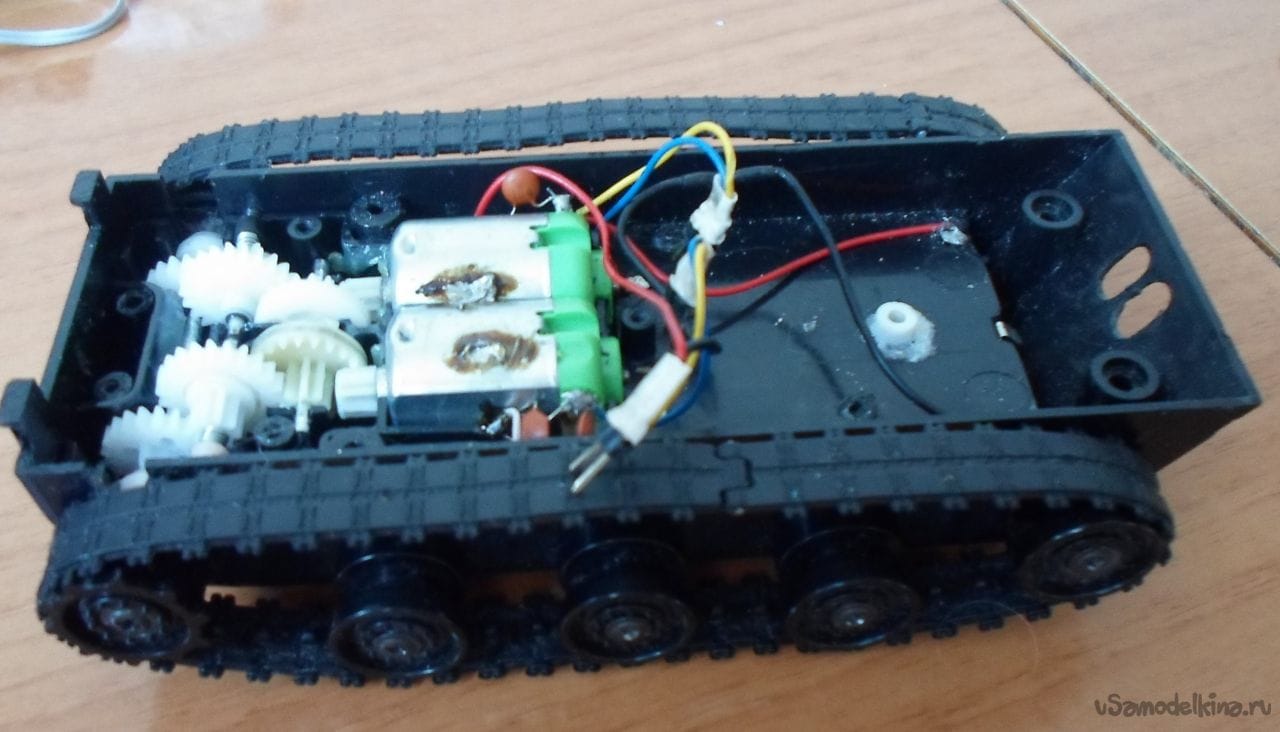
За основу проектирования кибер робота была взята гусеничная платформа от игрушечных р/у танков («танковый бой» состоящий из комплекта двух танчиков см. Фото 1.)

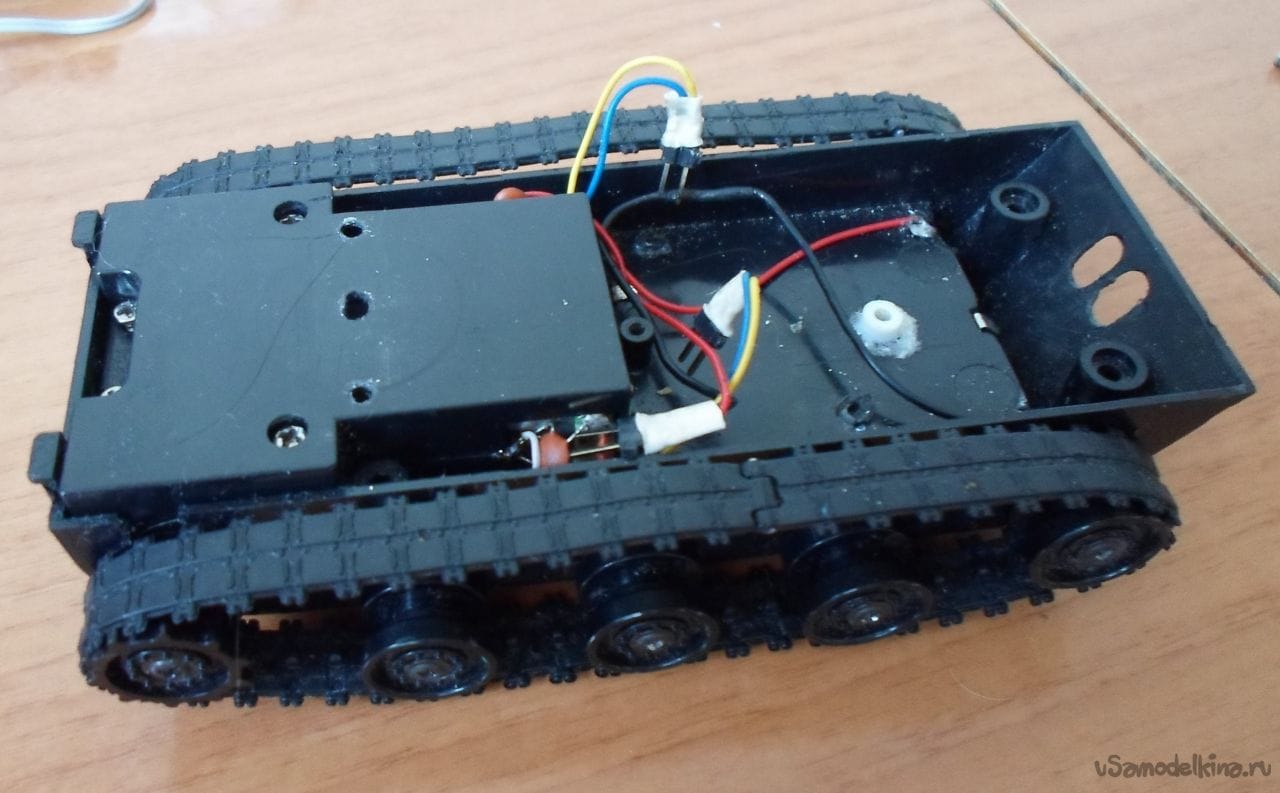
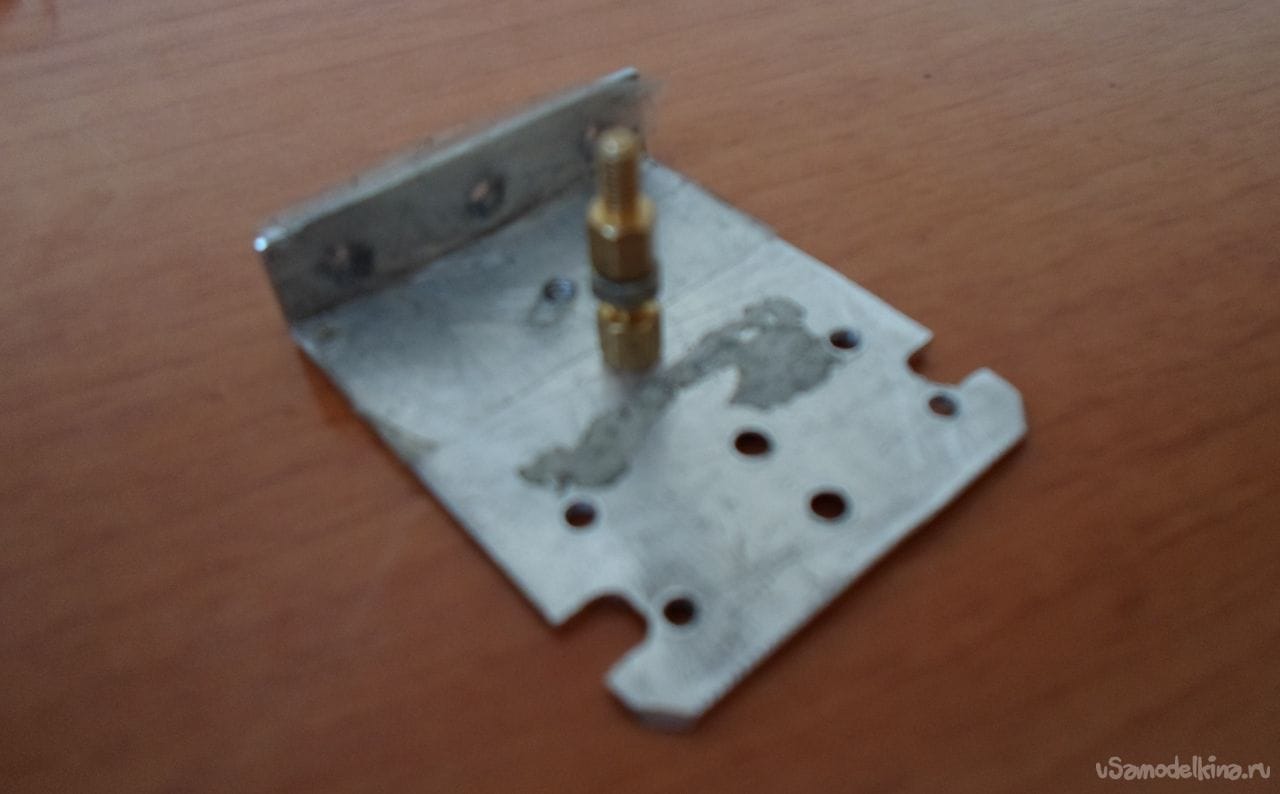
Затем после некоторых переделок этих танчиков, появились две основные запчасти для конструирования кибер робота. Первая запчасть используется для передвижения кибер робота –это сама гусеничная платформа см. Фото 2. Фото 2.1
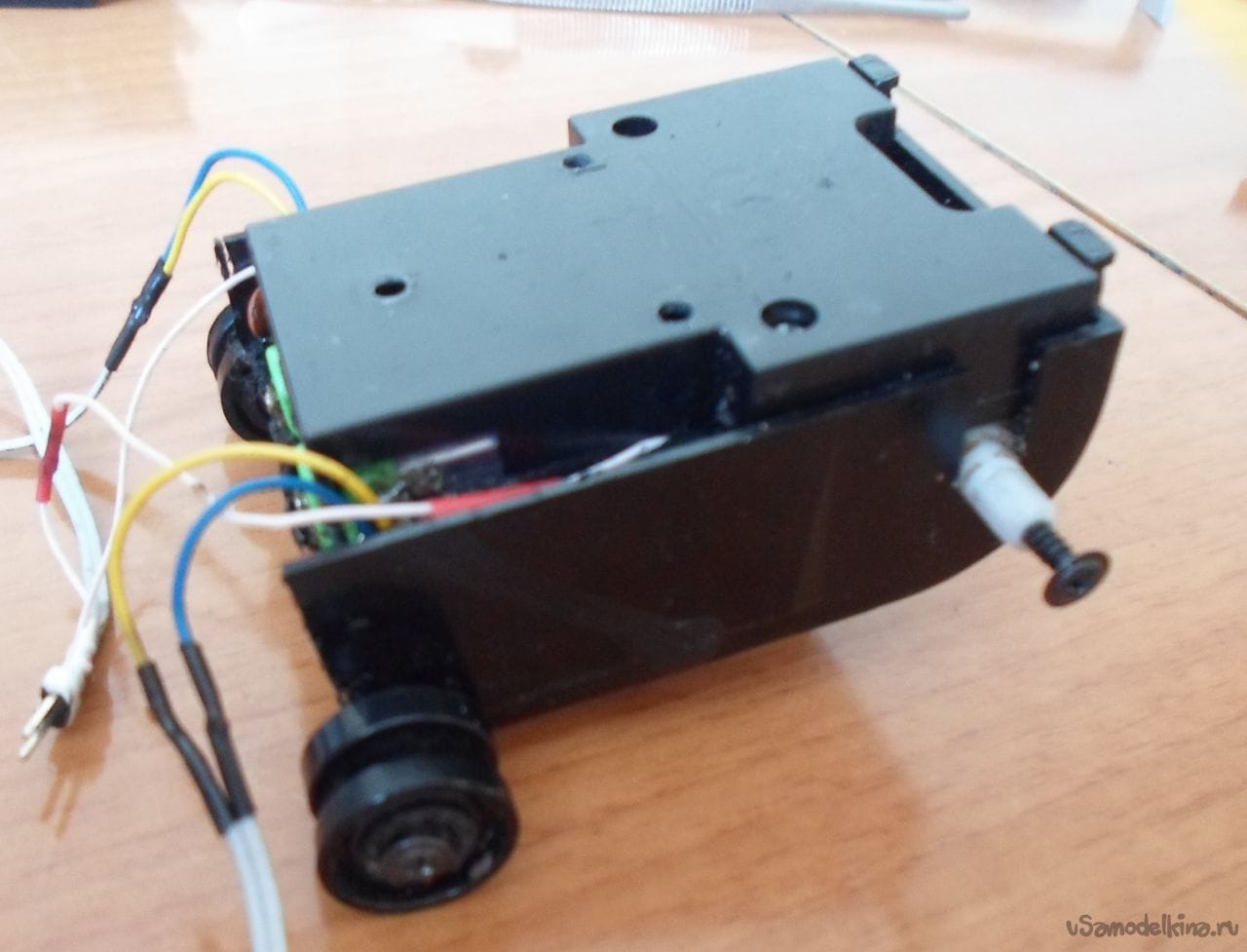
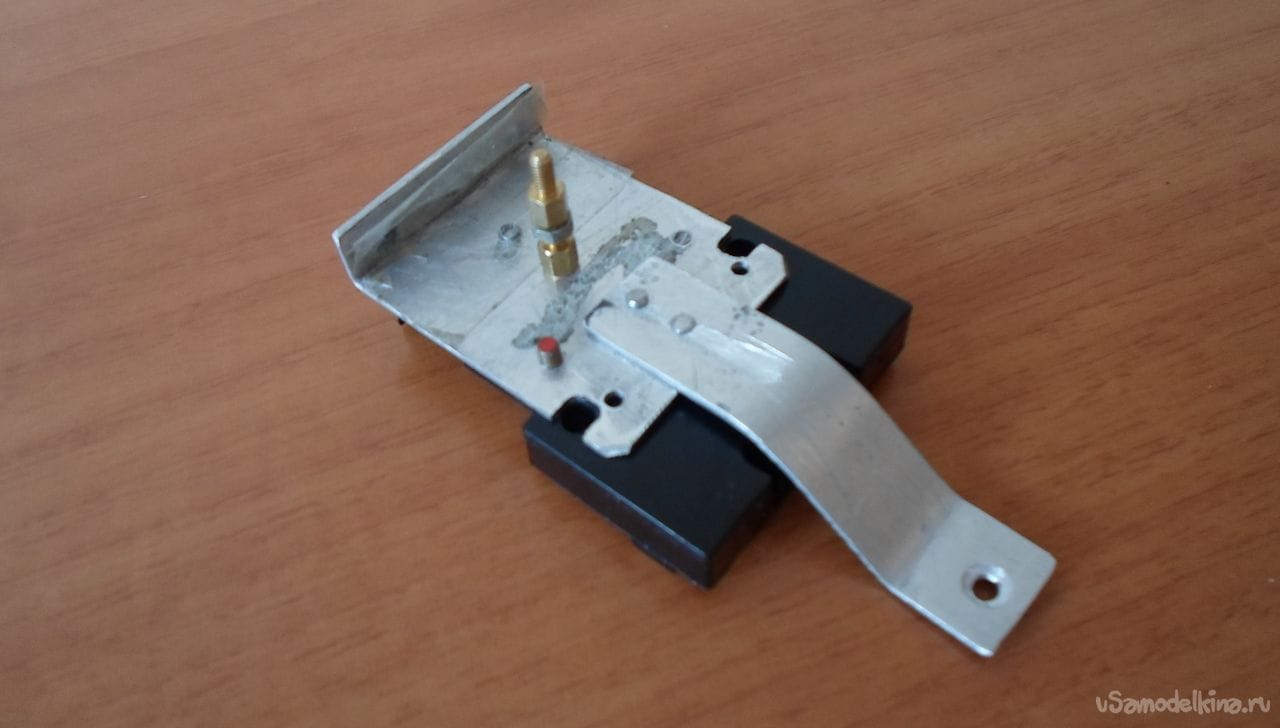
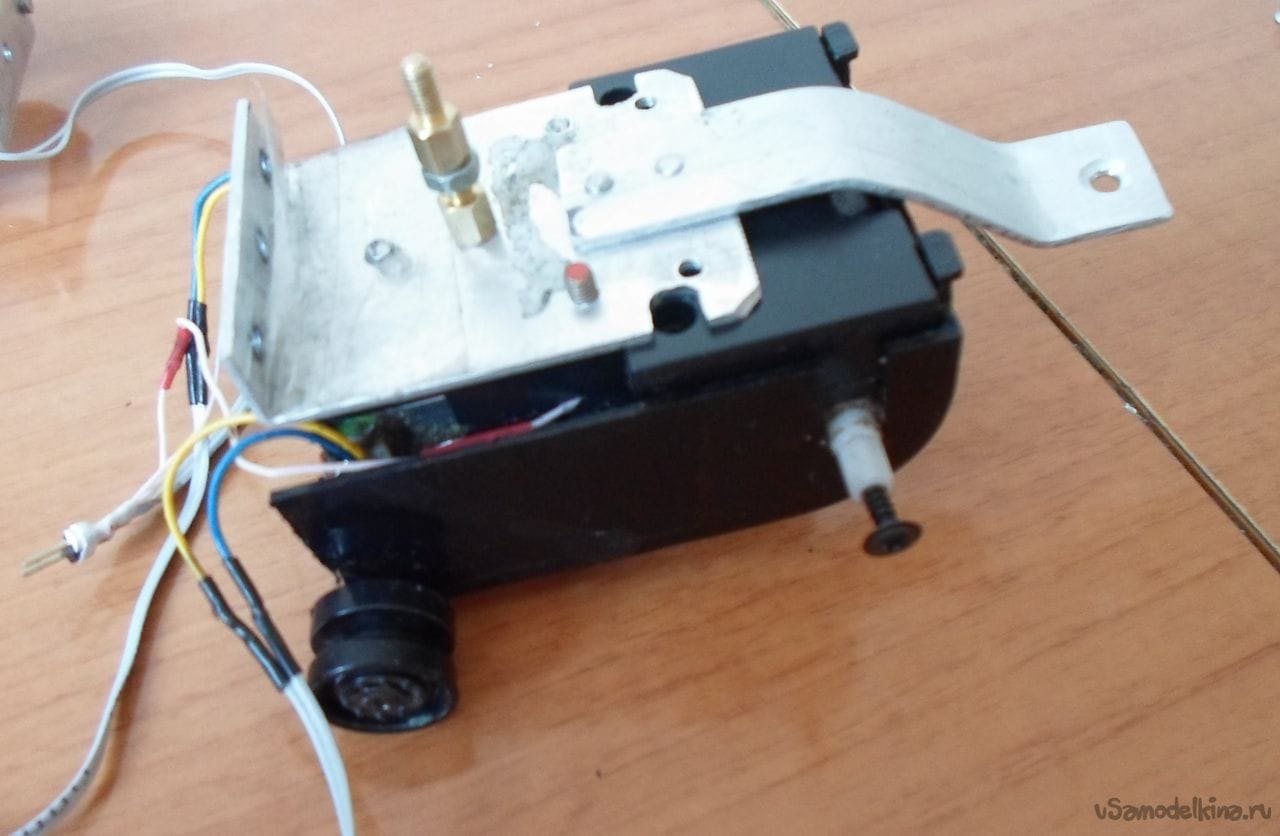
Вторая запчасть используется для подъёма и опускания манипуляторов («рук» кибер робота) см. Фото 3. Фото 3.1

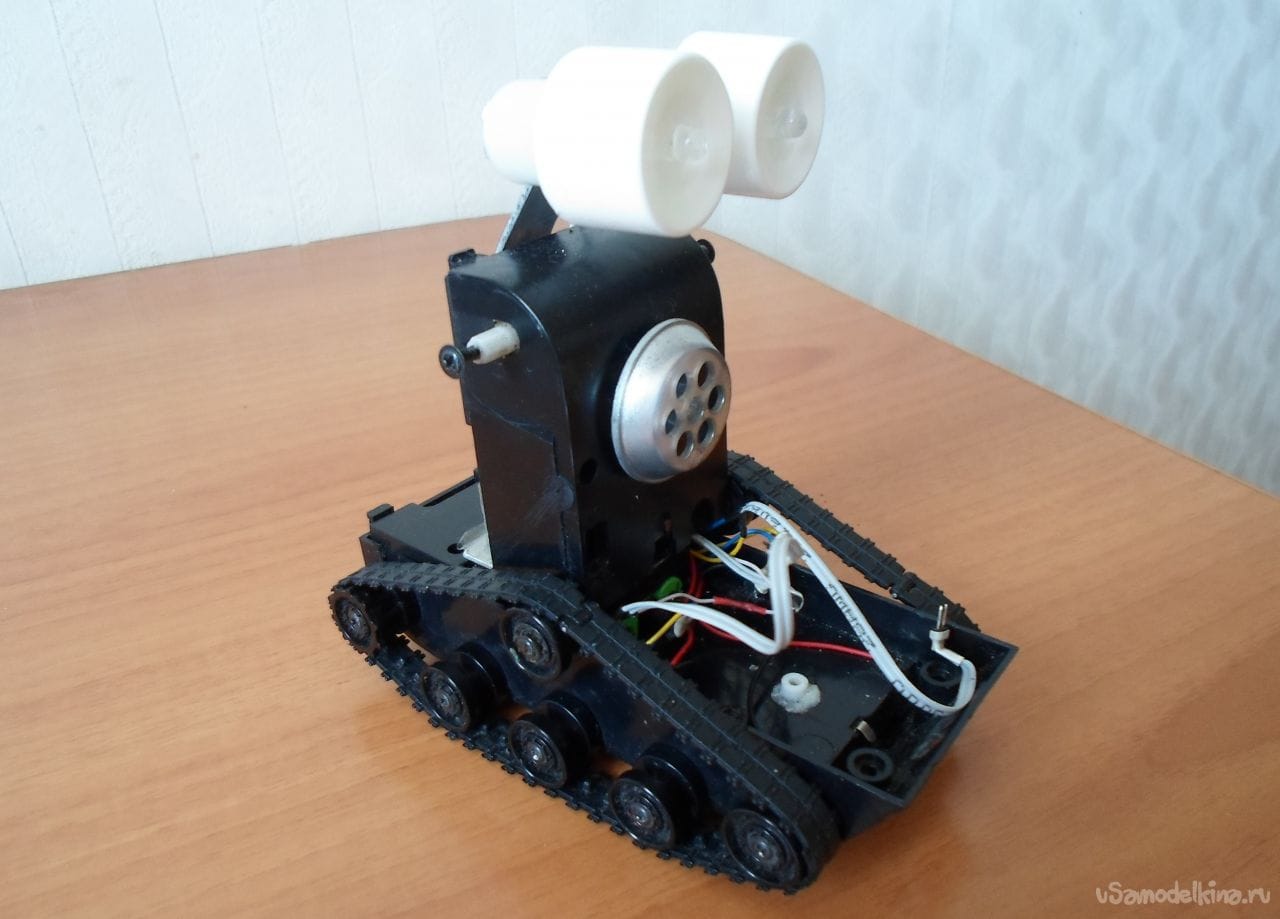
В качестве головы кибер робота (см. Фото 4.) применил колпачки от пластмассовых бутылочек см. Фото 4.1 (бутылочка от медицинского препарата перекись водорода см. Фото 4.2)



В качестве окуляров кибер робота я взял колпачки от зубной пасты см. Фото 4.3

Для крепления всех составных частей кибер робота, применил алюминевую полоску соответствующих размеров (см. Фото 5.) и далее после проведения слесарных работ (см. Фото 5.1 Фото 5.2 Фото 5.3 Фото 5.4) получилось уже видимое очертание облика будущего кибер робота, правда пока без «рук» манипуляторов. См. Фото 6. Фото 6.1 Фото 6.2 Фото 6.3




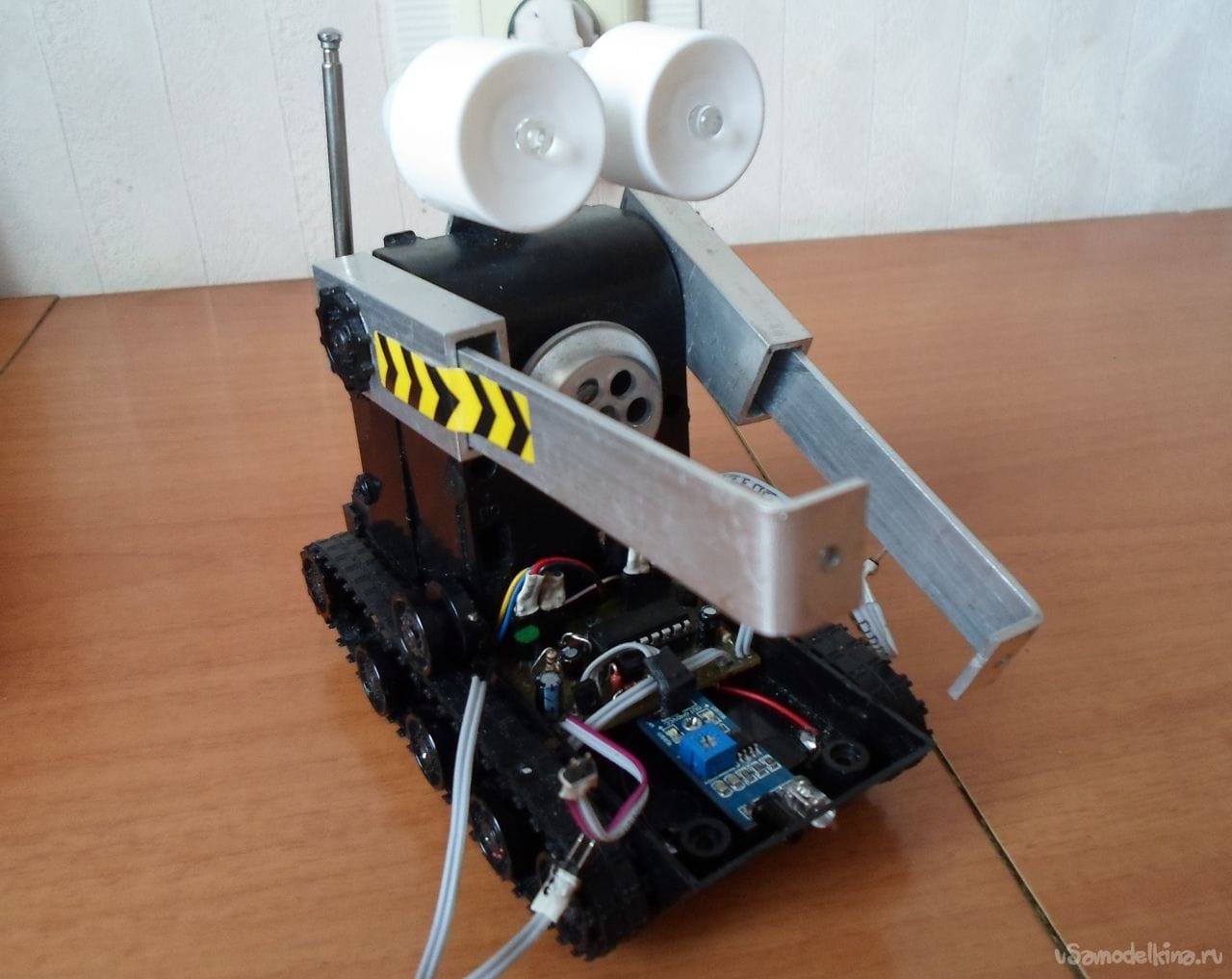
Теперь я расскажу Вам как изготовить руки-манипуляторы. Для этого нам понадобиться алюминевая полоска соответствующего размера (см. Фото 7) и прямоугольная трубка (см.Фото 8)

Затем после проведения слесарных работ получаем те самые руки- манипуляторы (см. Фото 9.)
Далее устанавливаем руки-манипуляторы на свои места и закрепляем шурупами (см. Фото 10.)


Теперь наконец кибер робот почти в сборе. Но это пока ещё не всё, ведь его ещё надо оживить и научить разговаривать, а так же думать ! Так что теперь приступаем к самому главному вопросу в этом проекте – как заставить нашего кибер робота передвигаться, при этом объезжать препятствия на своём пути и разговаривать, повторяя голос своего создателя!
Часть 2. "Мозги кибер робота"
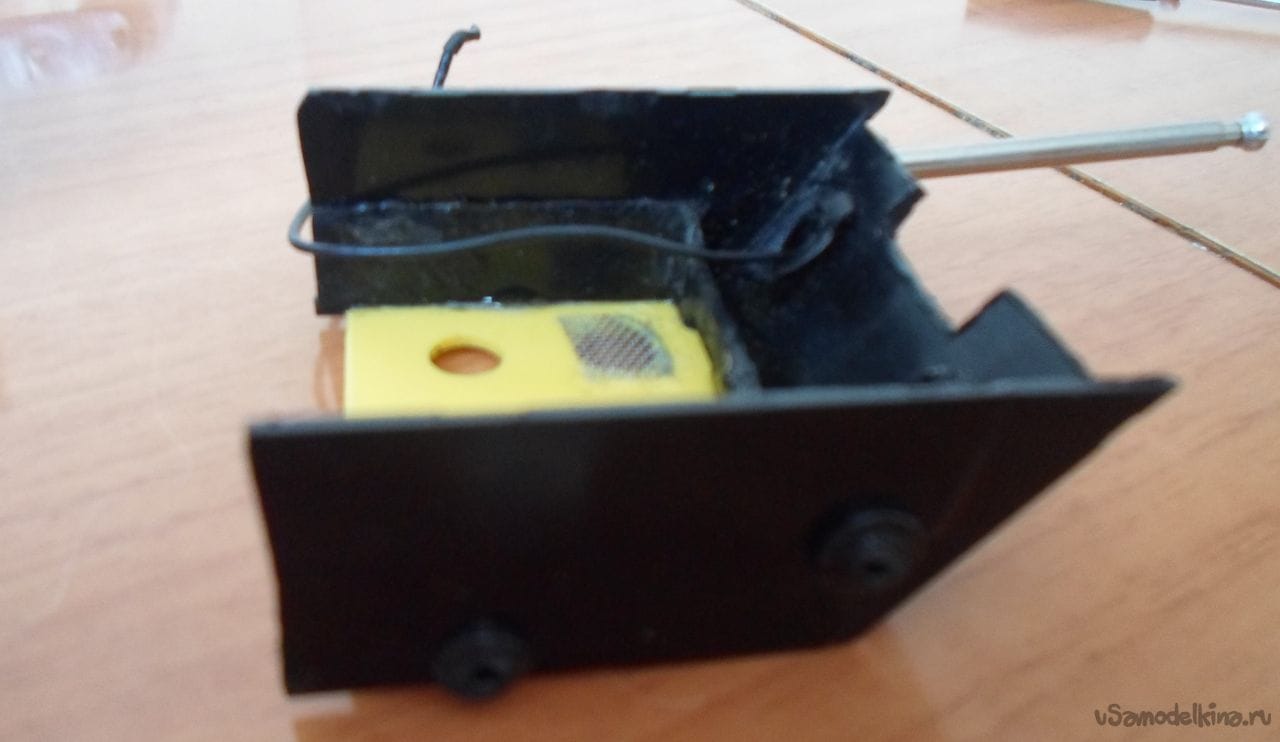
Как Вы помните в Части 1 «Механика» мы изготовили из дух игрушек две основные запчасти для кибер робота –гусеничную платформу и корпус для «рук» манипуляторов. Ещё из второй игрушки у нас осталось не используемая запчасть – которую мы сможем применить в качестве корпуса, где сможет разместиться электронная схема голосового блока, после некоторой переделки. (см. .Фото 11.)
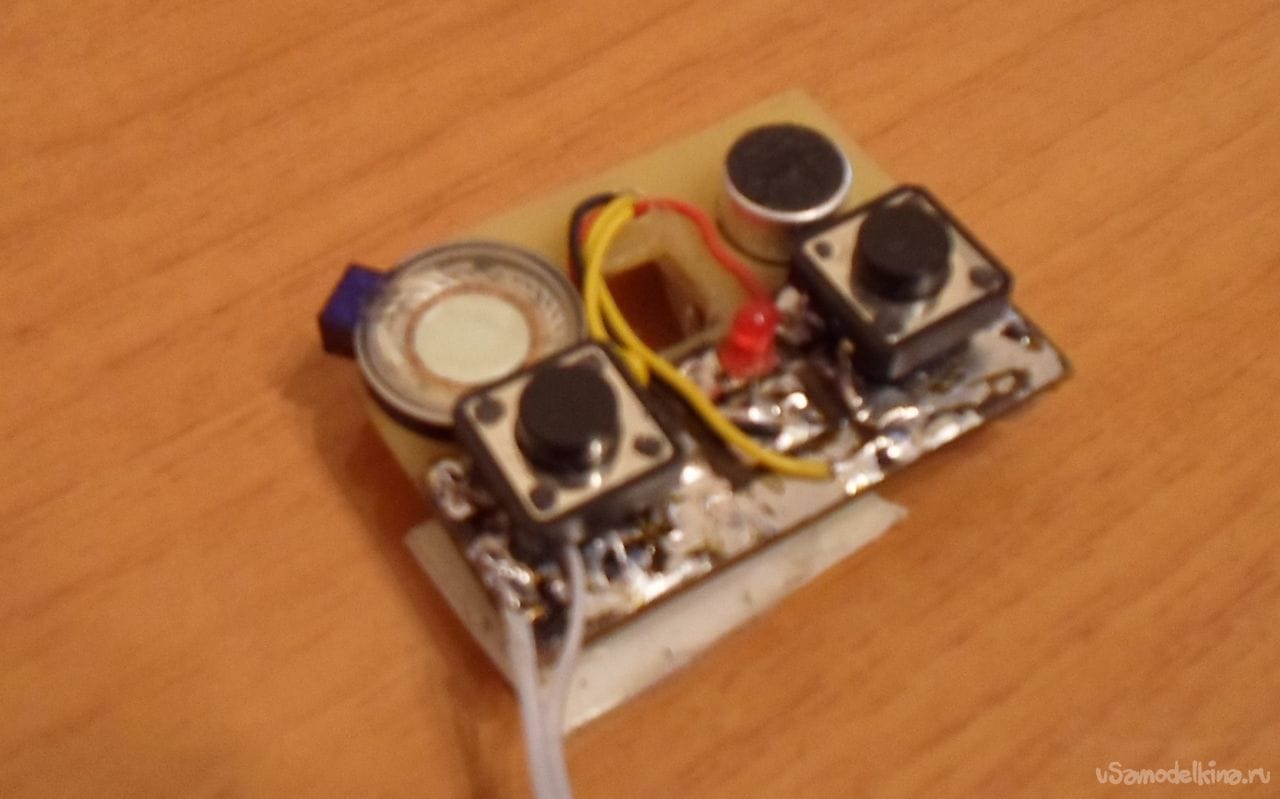
Электронная начинка голосового блока представлена на Фото 12. Фото 12.1 Данный модуль был изготовлен на базе готовой схемы, который был приобретён в радиомагазине. Общий вид кибер робота с установкой на него голосового блока представлен на Фото 13. Фото 13.1



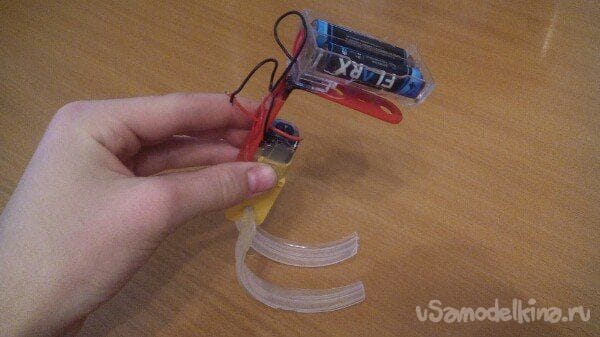
Теперь поговорим как научить нашего кибер робота двигаться, при этом объезжать препятствия. Для этого нам понадобятся «специальные глаза» и специальная микросхема управления моторами движения гусеницами кибер робота. В качестве «специальных глаз» я приобрёл в радиомагазине оптоэлектронный датчик приближения к объекту (см. Фото 14)
Данный датчик работает на отражении инфракрасного луча, невидимого для человеческого глаза, который он передает и принимает. Далее сигнал с этого датчика будет поступать на наш электронный блок управления моторами. (см. Фото 15.)

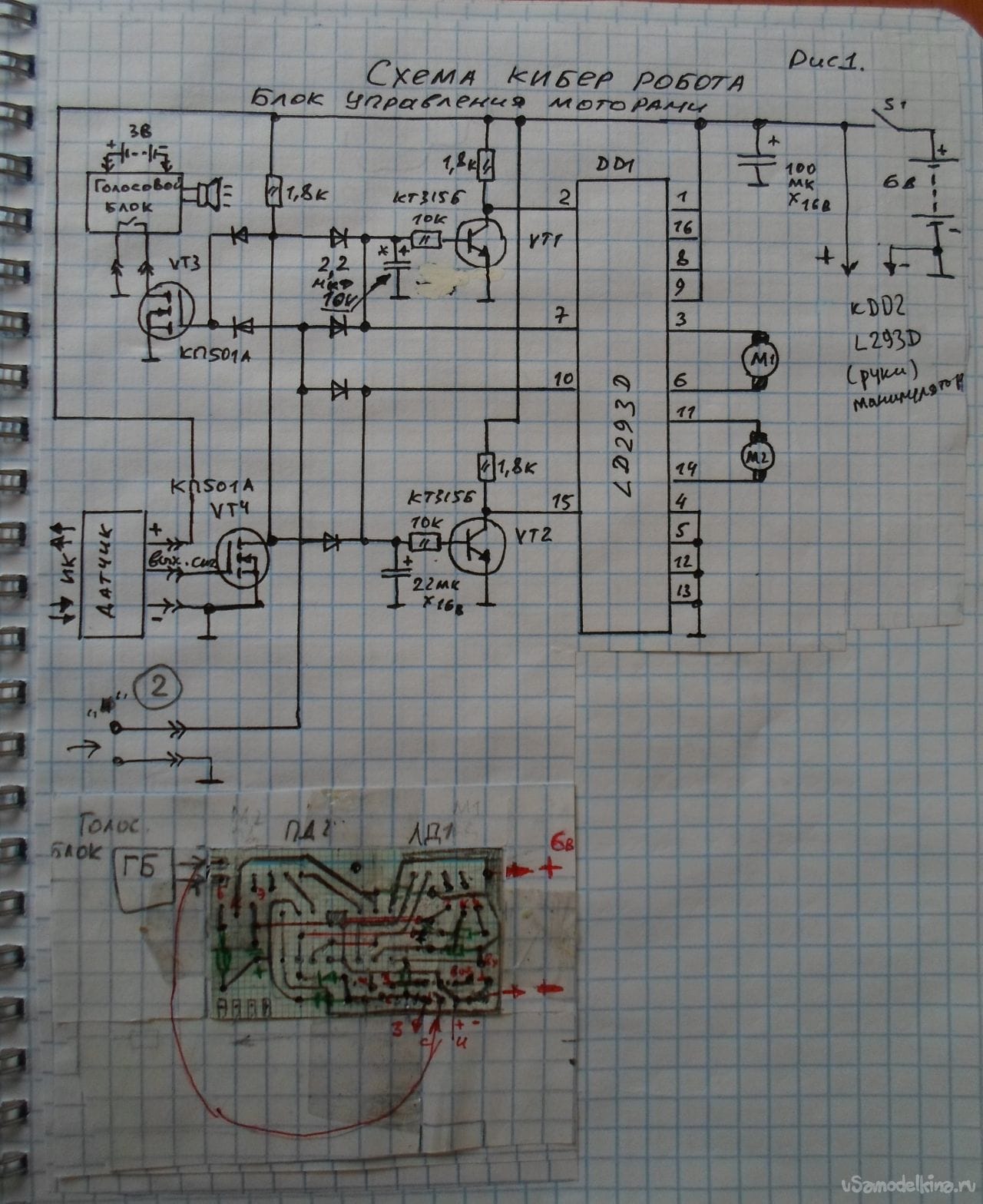
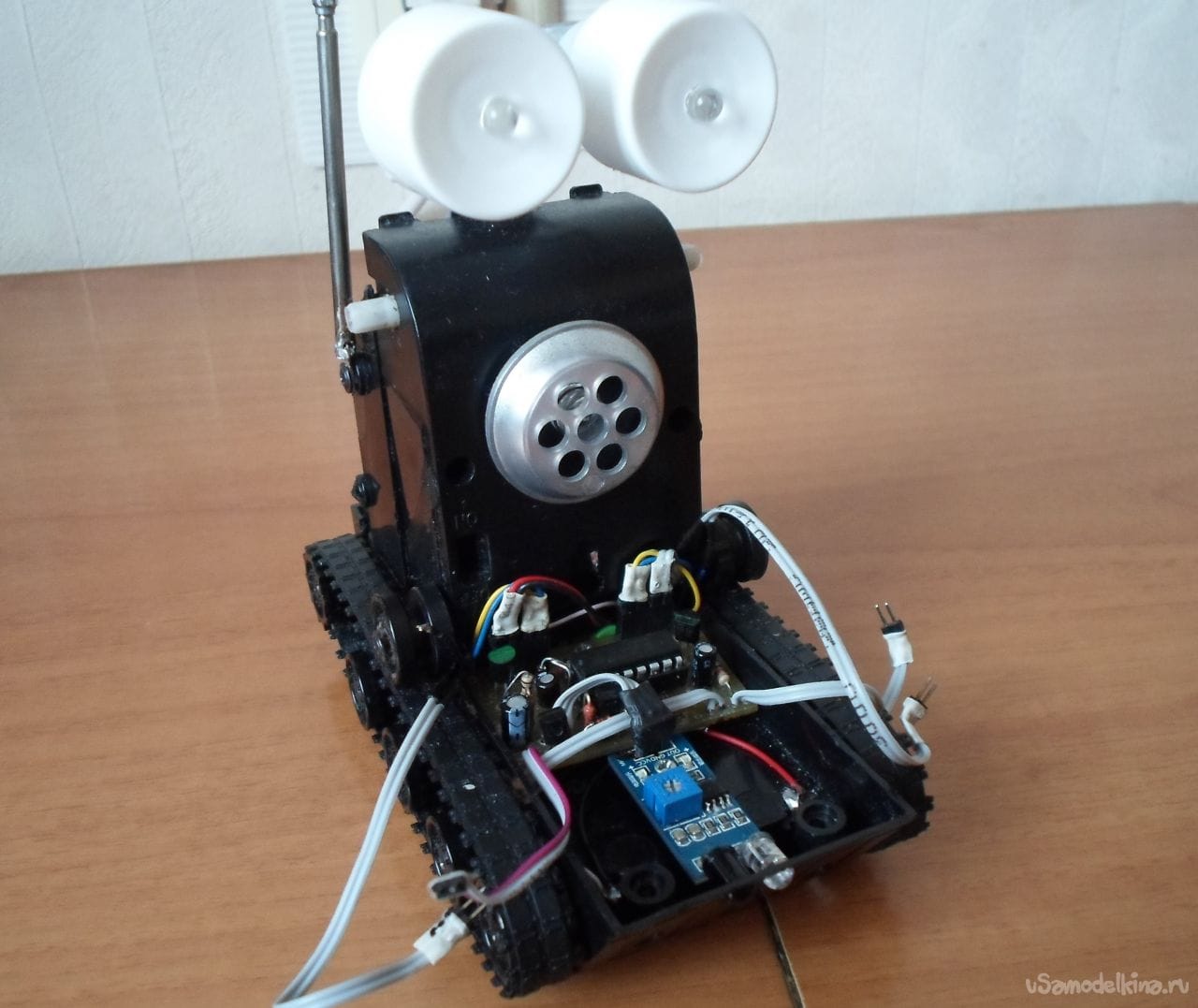
Блок управления моторами распознаёт сигналы с датчика и даёт соответствующие команды моторам. Таким образом, когда кибер робот подъезжает на определённое расстояние к препятствию, он отъезжает от него назад и делает небольшой поворот в сторону, затем далее следует вперед. Вот такой небольшой алгоритм работы электронного блока управления моторами. Основываясь на данный алгоритм, мной была разработана принципиальная электрическая схема Рис.1 Общий вид расположения датчика приближения и электронного блока управления моторами кибер робота показан на Фото 16. Фото 16.1
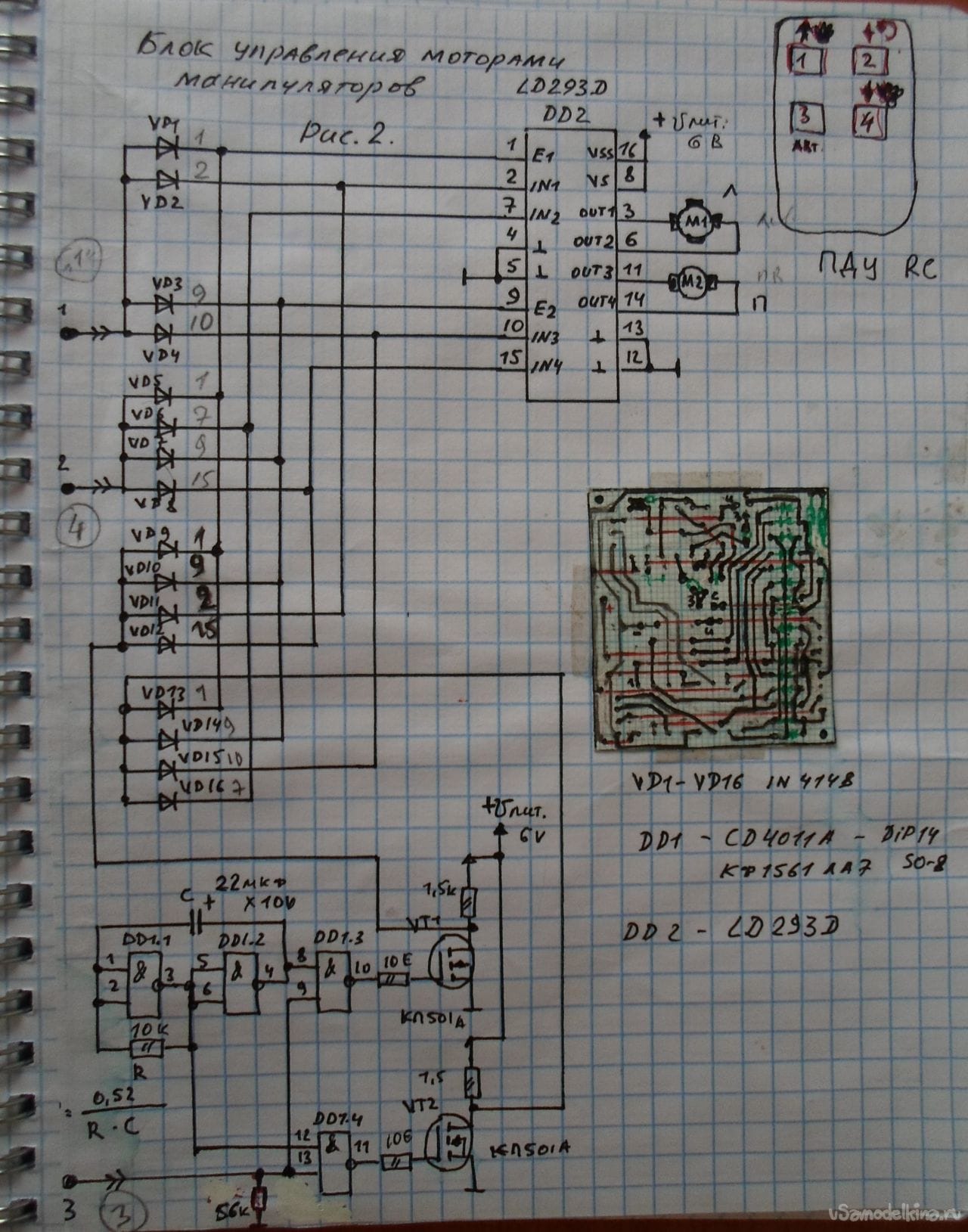
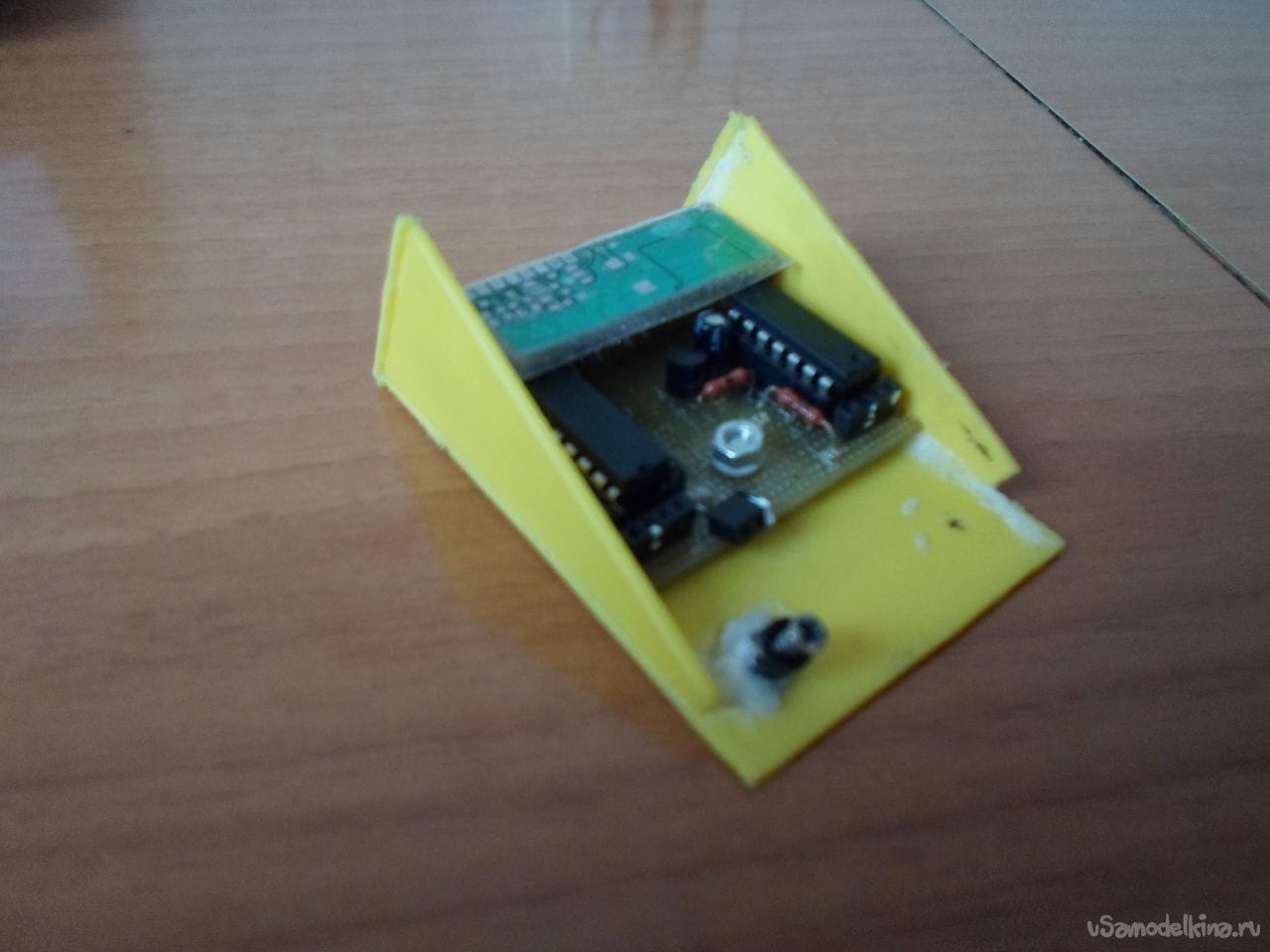
Далее я Вам расскажу как управлять «руками» манипуляторами кибер робота. Для этого мной была разработана электронная схема управления моторами подъёма и опускания «рук» манипуляторов см. Рис. 2 Сам электронный блок показан на Фото 17.
Который разместился в передней части съёмного корпуса Фото 18. Фото 18.1 , Фото 18.2

Съёмный корпус разработан и изготовлен мной из подручных материалов. В качестве материала использовал пластмассовые перегородки от ящика под мелкие запчасти (см. Фото 19 Фото 19.1)


Заранее подготовленные заготовки будущего съёмного корпуса склеивались специальным клеем для пластмассы (см. Фото 20)

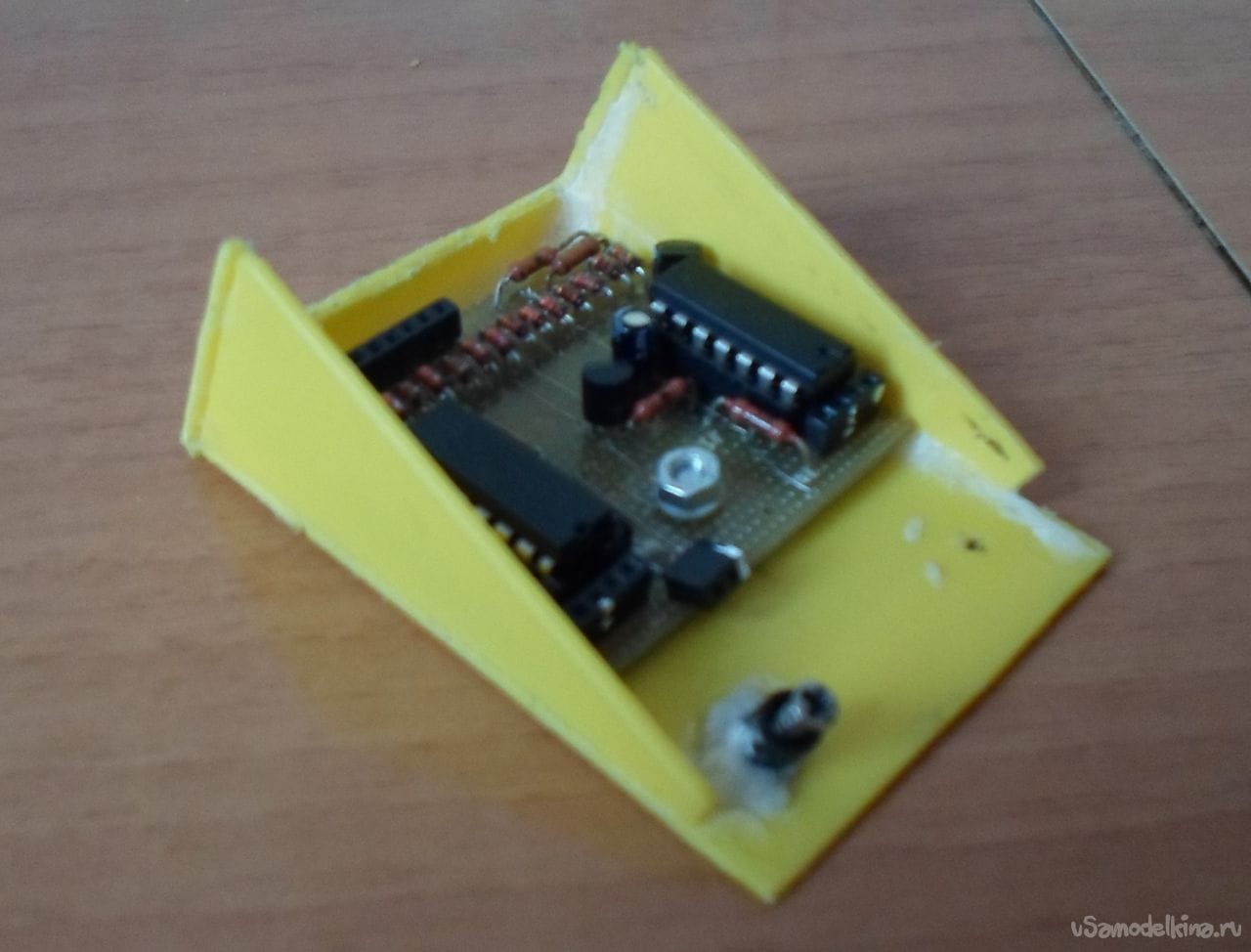
Для дистанционного управления кибер роботом я применил готовый радиоэлектронный набор состоящий из пульта дистанционного управления и платы приёма радиосигнала (см. Фото 21) Данную плату радиоприёмника я разместил вместе с платой управления моторами «рук» манипуляторов в съёмном корпусе кибер робота (см. Фото 22 Фото 22.1 Фото 22.2)



Приёмная антенна для управления кибер роботом разместилась на корпусе голосового блока (см. Фото 23).
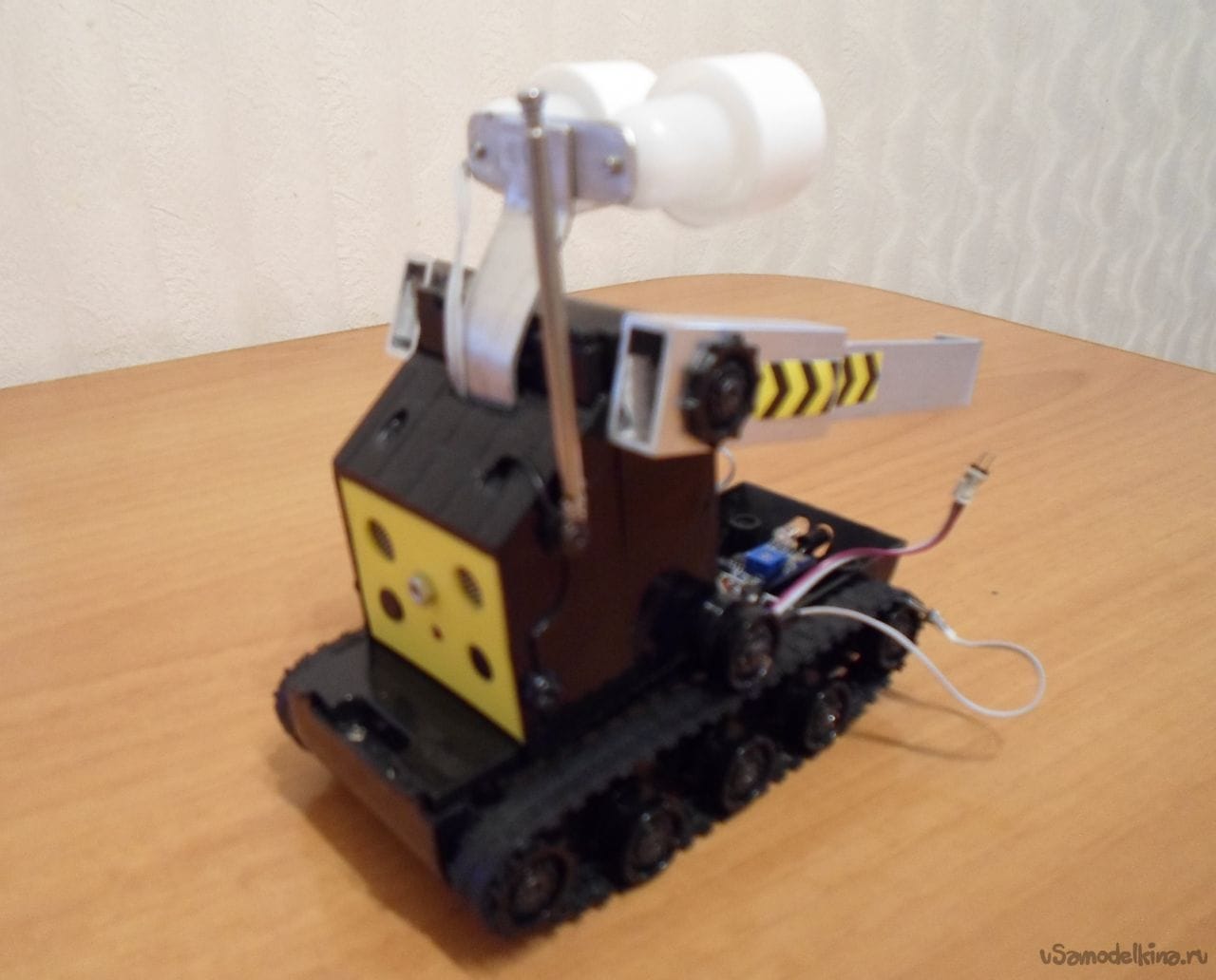
Для более выразительного и привлекательного вида мной были установлены разноцветные мигающие светодиоды в окулярах и на груди кибер робота. Теперь остаётся собрать все узлы кибер робота в единое целое. Ну вот, знакомьтесь кибер робот WALLI-E !!! Фото 24.

Часть 3. «Бортовое электропитание»
В процессе эксплуатации кибер робота большое внимание приходиться уделять элементам питания. Изначально мной было задумано питание кибер робота от обычных пальчиковых батареек типа ААА 1,5В 4шт. (см. Фото 25.)

Питание радиомодуля от отдельной Li-On батарейки 3,7В 150мА/ч см. Фото 26.

Но как выяснилось, обычных батареек на долгое время не хватает. Поэтому пришлось задуматься, как эту проблему решить, и сделать так что бы постоянно не покупать новые батарейки. И выход нашёлся из этой ситуации. Мной были приобретены аккумуляторные батарейки типа ААА 1,2В 1300мА/ч см. Фото 27. Они аккуратно подошли по размеру в бортовой отсек питания кибер робота см. Фото 28.


Но всё же аккумуляторные батарейки так же постепенно разряжались и необходимо было их каким то образом подзаряжать. В результате мной было разработано универсальное автоматическое зарядное устройство. Принципиальная схема такого зарядного устройства приведена на Рис. 3
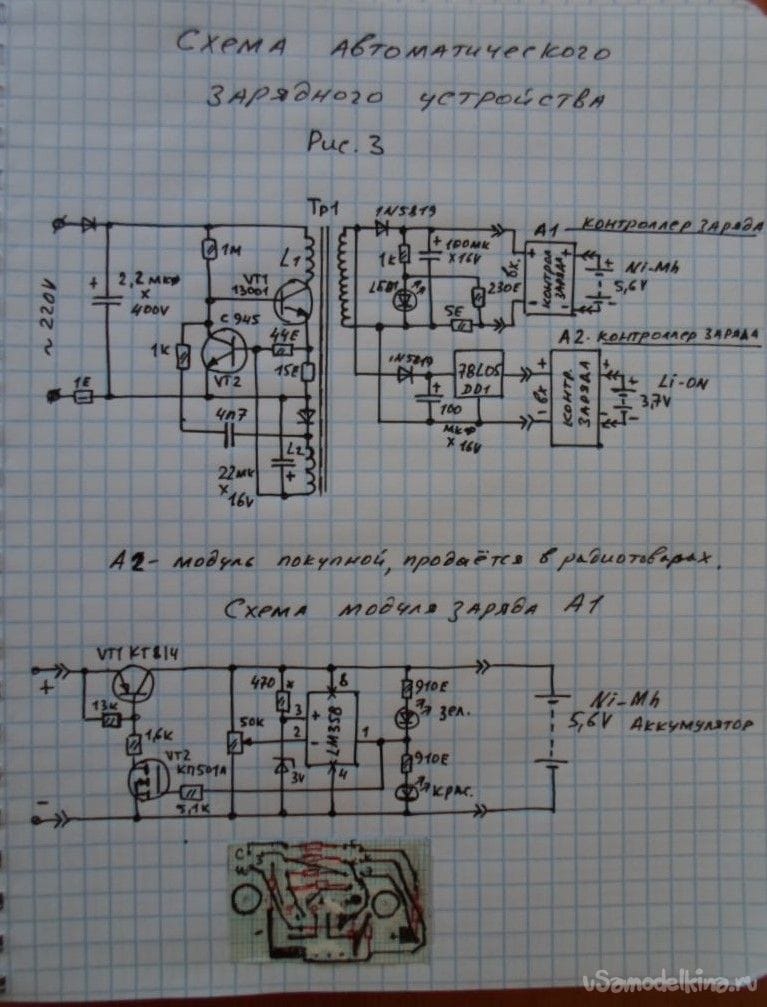
Данное устройство позволяет заряжать любые аккумуляторные батарейки как Li-On, так и Ni-Mh с последующей индикацией о состоянии заряда аккумуляторных батареек и автоматически отключается при полном заряде последних. Общий вид зарядного устройства показан на Фото 29.

Вот теперь мой проект по разработке кибер робота полностью воплотился в жизнь!
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.