


Лето в самом разгаре, немного выкраивая время между прополкой и сбором урожая «Колорадо», я вернулся к старому проекту, а именно электрическим индивидуальным средством передвижения.


Сказать, что он был провален, ну тут я так не думаю. В первой версии на колесе, я проехал не один километр. Но в процессе эксплуатации всплыли технические ошибки. Четыре аккумулятора, вместе с моим весом, были расположены выше оси колеса, что способствовало сильной вибрации в вправо, и влево при движении, это не раз выбрасывало меня из седла. Но даже перенос веса не улучшила бы проект, редуктор в виде коробки передач от мопеда, оказался очень шумным, меня было слышно, а потом видно, а от масла, залитого в редуктор, я был еще и грязным.
Проанализировав неудобные моменты, первый блин всегда комом, приступил к улучшению проекта.
Было решено сделать нечто облегченное, а именно взял за базу конструкцию сигвея, наездник стоит при движении и держась за руль маневрирует. Он устойчив, проходимость не плохая, но не быстрый и габаритный. Если разогнаться, трудно управляем на поворотах.

Чтобы исправить этот недостаток я отказался от второго колеса и как у моноколеса устанавливаю две педали, вместо платформы, для езды стоя. Идея не моя, я только применяю ее в своем проект. Это выглядит как то так.


Для начала безжалостно удалял все четыре гелевых аккумулятора с их посадочным местом. Применение их было самым необдуманным решением, подкупила дешевизна, тем более их расположение, выше оси, плюс смещение по горизонту. Емкость составляла 20А, вольтаж 25В.

Замена аккумуляторов подняло цену проекта, применил ранее приобретенные 72 литий-ионных аккумулятора. После калибровки по емкости получил те же 25В, 21А, но по весу гораздо легче четырех старых аккумуляторов, легко держу на пальце. Я их скомплектовал 2х12.6 В и привязал к контроллерам заряда, разряда BMS 3S max 40A. Все разместил в прозрачном пластиковом контейнере, в нем же установил вольтметр, для визуального контроля, который включается постоянным магнитом, через геркон. Двумя переключателями сделал выход батарее на 25В и на 12.6В. Причем в режиме 12.6В могу производить зарядку от зарядного устройства, а так же производить подзарядку по возможности на стоянках, от солнечной панели. Не придумал пока, как мне случайно не включить сразу два тумблера одновременно и не сделать короткое замыкание. Может, кто подскажет, как в это не вляпаться?







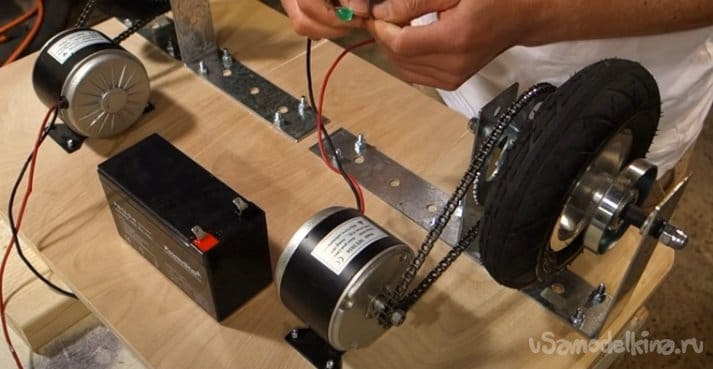
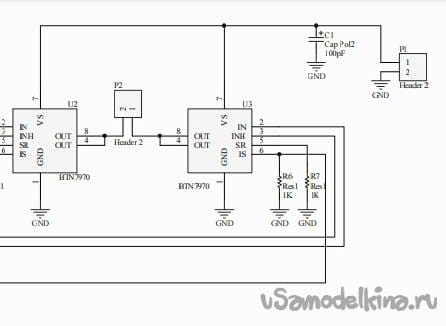
Электромотор, МЭ 252Б, оставляю прежний. Он коллекторный, 300Вт 24В, 6000 об/мин. Управляется драйвером двигателя BTS7960 43А, 27В. Драйвер, я умудрился спалить, при включении перепутал полярность. Сгорела управляющая плата, выгорела силовая дорожка платы, взорвался конденсатор, но сами чипы не пострадали, поэтому не обращайте внимания на проволочные перемычки, которые я впаял на управляющий сигнал и включение чипа. Драйвер заработал как и раньше.


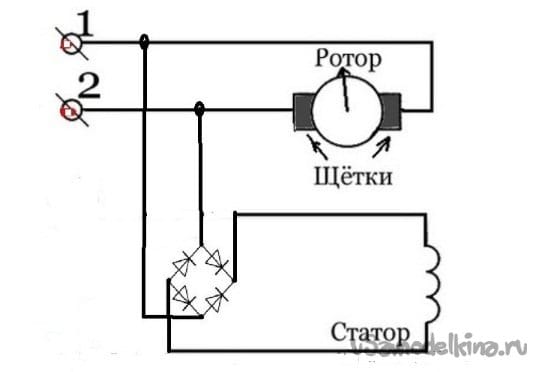
Для реверсивного включения электродвигателя МЭ 252Б, пришлось применить диодный мост KBPC5010 700В 50А, который подключил по схеме. На хорошем радиаторе он прекрасно работает

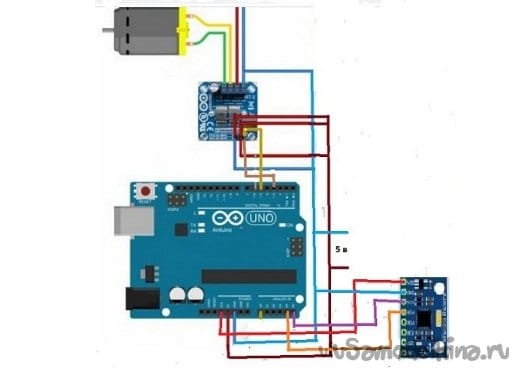
Драйвер коллекторного двигателя подключен к гироскопу-акселерометру GY-521 (MPU-6050), через контроллер ARDUINO UNO. MPU-6050 контролирует местоположение в пространстве и в случае малейшего перемещения модуля выдает сигнал. Контроллер ARDUINO UNO обрабатывает этот сигнал, и преобразует его в 0 и 1, он управляет двигателем, разгоняя, притормаживая, либо включает реверс.

Ну а если объяснить проще, это самобалансирующаяся система транспортного средства, которая при наклоне гироскопа двигается в сторону наклона, стараясь исправить ошибку. За счет этого наездник управляет девайсом, не падая, разгоняясь и тормозя.
Скетч для ARDUINO UNO, нашел в интернете у Circuit Magic, он рабочий, но имеет большой дребезг. Чтобы выровнять управляющий сигнал с чувствительного GY-521, пришлось найти и установить библиотеку фильтра Калмана . Только после ее установки все пришло в норму, электродвигатель заработал стабильно без рывков.
В ARDUINO UNO нужно вставить скетч, для этого ищем в интернете arduino-1.8.12-windows, скачиваем и устанавливаем в компьютер. Там же в интернете находим I2Cdev, MPU6050, фильтра Калмана и вставляем в библиотеку.



Переносим скетч и грузим в контроллер.
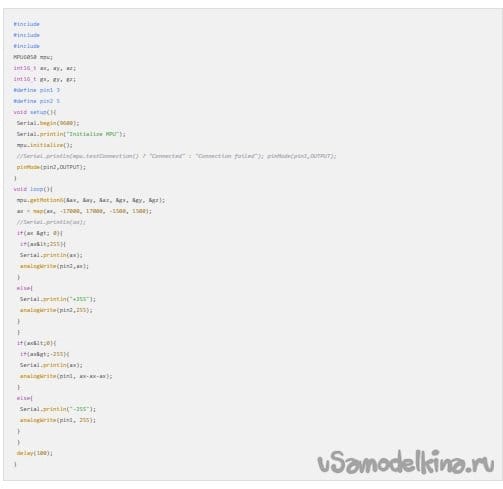
Схема проекта не сложная
В процессе улучшения проекта, я цепную передачу поменял, на ременную. Снял с рамы коробку передач, цепь и звездочку. Из листового пластика 16х350х350 электро лобзиком выпилил круг. Он, как не старайся идеальным не получился, если только не процарапывать его резцом по окружности от центра. Это долгий и нудный процесс, мне этот способ не понравился.



Так вот после лобзика стал вопрос, как добиться правильной геометрии, искать токаря, не вариант. Можно ручным фрезером, но у меня его нет. Поэтому вместо фрезера я применил дрель. Взял пальчиковую фрезу диаметром 10 мм с нижним опорным подшипником. Нашел проструганную доску на чердаке, просверлил отверстие на 12 мм под опорный подшипник. Просверлил отверстие под центр выпиленного круга. В отверстие вставил болт, на него одел заготовку шкива. Потом включил дрель и аккуратно завел опорный подшипник в просверленное отверстие основания.




Неожиданно для себя, легко провернул заготовку шкива, только стружка разлетелась в разные стороны. Получилась идеальная деталь. Толщина будущего шкива с двух миллиметровым зазором зайдет в вилку рамы и чтобы крепежные гайки не застопорили вращение я сверлом Форстнера углубил их посадку. Так же этим сверлом расширил центральное отверстие и установил на переднее колесо китайского скутера вместо тормозного диска (в первом проекте я устанавливал звездочку). Затем собранное колесо вставил в раму.






Из имеющихся коробов скрутил стенд, на который закрепил раму для проточки шкива. В УШМ вместо отрезного диска по металлу поставил победитовый отрезной диск по пиломатериалу. Для безопасного применения УШМ при проточки ручья шкива я использовал упор. Когда прорезал диском паз, я поменял диск на лепестковый круг и сформировал профиль ручья.


На ту же вилку, где стоит колесо, я приварил резьбу, на которой установлен электромотор. Почему резьба? Для того, чтобы можно было выставить без перекоса шкивы.



Попробую применить штатный спидометр, он в рабочем состоянии. Не для того, чтобы смотреть, с какой скоростью я буду перемещаться, а какой километраж удалось преодолеть.



В следующей статьи расскажу как прошла сборка электрического транспорта, как пройдет обкатка и поделюсь впечатлениями перемещения в пространстве.

Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.


