[media=https://www.youtube.com/watch?v=vxh9kNXAOXw]
Вот и пришло время заняться второй частью моего проекта, а именно собрать волшебную коробочку и раскрутить кучку гаек и проводов. Двигатель планировал под напряжение 48В. Полевые транзисторы, которые я применил, имеют заявленные пиковые параметры до 55В. Но пограничное состояние является краткосрочным, к тому же наши китайские друзья имеют свойство чуть – чуть преувеличить допустимость показаний своих товаров, поэтому, скорее всего рабочее, безопасное напряжение может составить 36В. Может я и наговариваю, буду пробовать подымать напряжение до планируемого уровня постепенно, может и все будет хорошо. Ну а если нет, заменю мосфеты, так как те, что я использую, имеют огромную усталость и стали слабоватыми.
Мне хотелось спаять все ровненько и красиво, но не тут то было. При правке растопыренных ножек у первых двух полевых транзисторов, происходила не предсказуемая ампутация копыт, ну прям как хвост у ящериц. В сердцах швырнул инвалидов в мусорное ведро, с бодрыми словами локации места прибытия, даже собрался временно отложить проект до свежих вливаний звонкой монеты. Но поостыв, подумал, ведь мосфетики то не сгорели, они то рабочие. Да раньше, когда ножки после неоднократных загибаний отрывались под самый пластик, эти полевые транзисторы меня больше не интересовали. Но в данный момент решил дать мосфетам без ножек еще один шанс. Очистив от пластика уголки мосфетов до меди, а где и просто к платформе крепежа я впаял протезы из скрученной медной проволоки. Остальные растопыренные ножки ровнять не рискнул и цеплялся к ним как получалось. В итоге получил нечто среднее между ожидаемым монтажом и действительным.




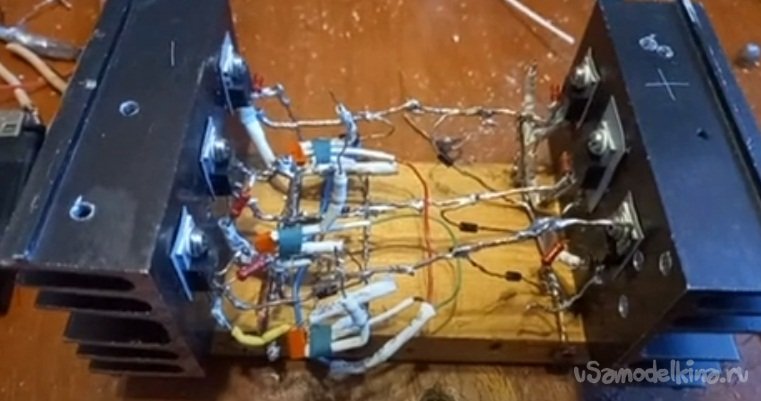
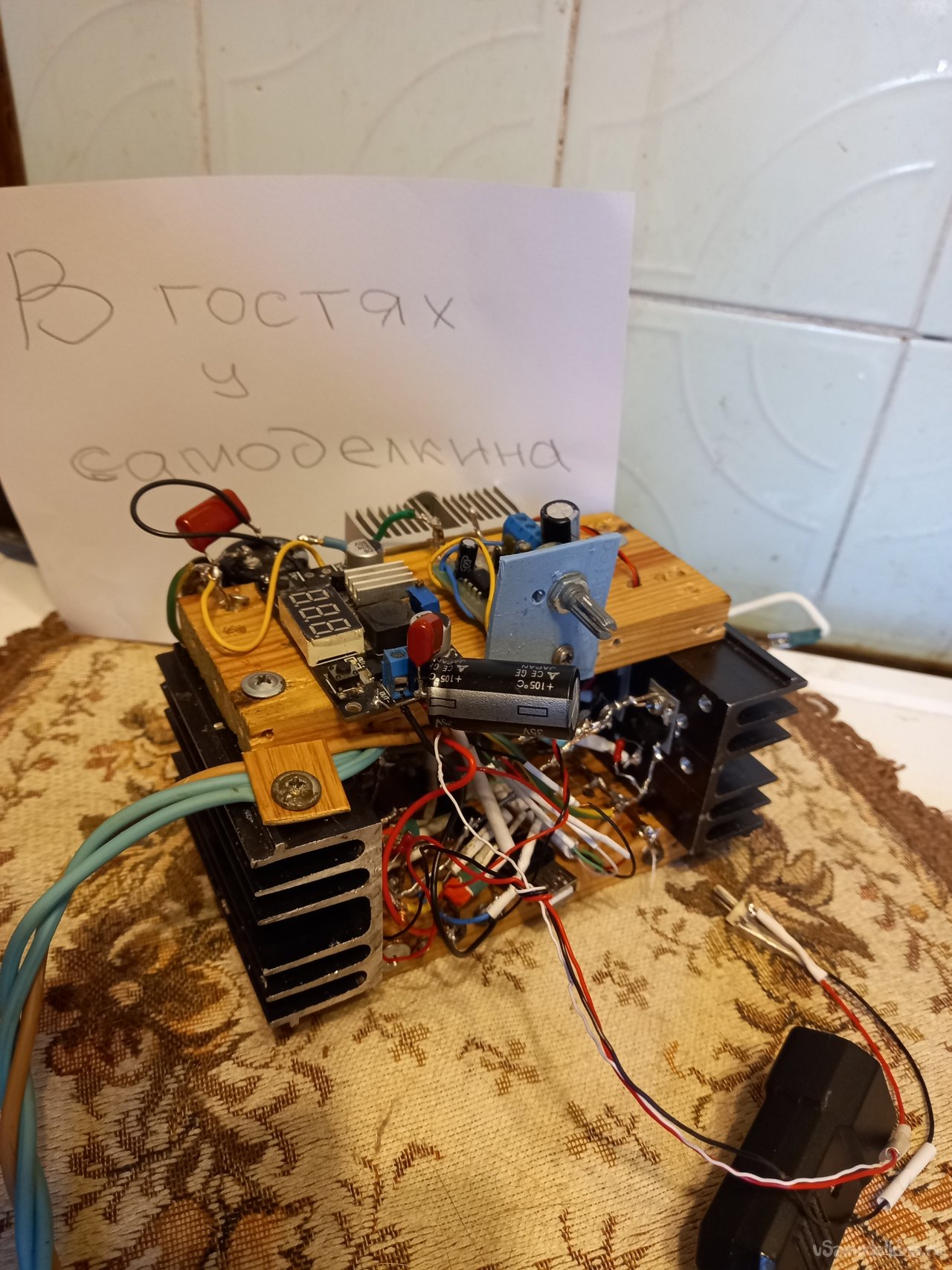
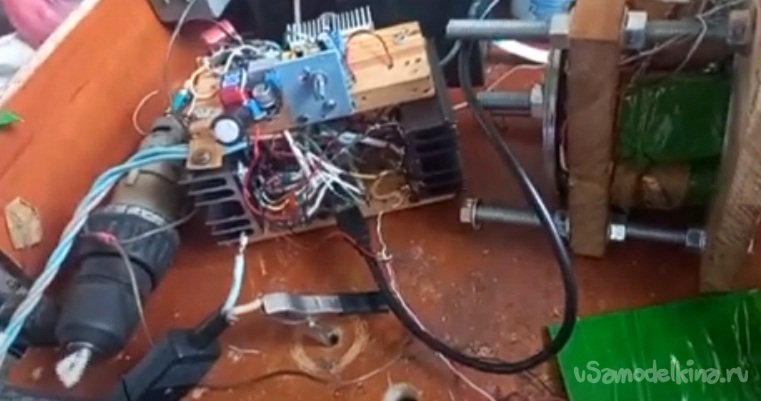
Радиаторы установил напротив друг друга, на одном через резиновые изолятор, расположил три IRFZ48N, на другом три IRF9501. Мне показалось так удобнее, питание для каждой группы свое и фазные выводы соединять проще, они находятся на против, друг друга. Мосфеты переключаются сигналами датчиков Холла, которые парно находятся между фазными катушками, находясь между магнитными полями ротора, один датчик уже отключается, а второй еще не включается. Это готовое мертвое время для безопасного переключения верхнего-нижнего ключа полумоста. А ну, да, так как Холлы выдают отрицательный сигнал, а для управления IRFZ48N нужен положительный, применил еще три транзистора КТ361.



В данном проекте изготовление реверса пока не входило в планы, поэтому вращение двигателя планировалось запустить по часовой стрелки. Для этого необходимо, чтобы магнит, имеющий южный магнитный полюс, приблизившись к датчику Холла, открыл его и тем самым подключил впереди находящуюся катушку так, чтобы магнитный поток был противоположный полюсу магнита. Иными словами, магнит должен притягиваться к катушке.
Чтобы добиться этого результата, во первых необходимо знать полярность магнитов на роторе. Можно для этого воспользоваться обыкновенным компасом, а можно воспользоваться датчиком Холла. Когда подносишь магнит южным полюсом со стороны надписи, датчик открывается. Полученный результат зафиксировал на роторе.

Теперь я знаю, что южный полюс магнита открыл нужный датчик. Но куда подать полученный сигнал, на «Р» канальный мосфет, или «N» канальный? Я поступил так, на сердечник катушки положил магнит южным полюсом вниз. Подал с аккумулятора положительный сигнал, магнит улетел в сторону. Значит, на сердечнике образовалось южное магнитное поле. Мне нужно, чтобы было противоположное магнитное поле, поэтому вывод с датчика я припаял в полумосте к «N» канальному мосфету, вывод спаренного датчика Холла к «Р» канальному мосфету. Так я поступил еще с двумя полумостами.
Можно было бы пойти и по другому пути, зная, что провод я укладывался против часовой стрелки, применить правило «буравчика».
С очередностью подключения полумостов разобрался,


но у меня рабочее напряжение 48-36В, а для нормальной работы двигателя надо и 12В. Тут я не стал заморачиваться с пайкой, а взял готовый понижающий модуль с вольтметром на борту. По нему я выставил 12В для питания транзисторов КТ361, а так же буду контролировать общее напряжение на аккумуляторах.

Этим же напряжением я запитал и ШИМ на НЕ555, с помощью которого буду регулировать скорость вращения двигателя. Мосфет ШИМ установил на отдельный радиатор. ШИМ сигнал полностью открывает полевой транзистор без дополнительного усиления,
Датчики Холла у меня имеют отдельное питание 4.2 вольта, а аккумулятор имеет свой контроллер заряда-разряда. Запитать датчики можно было бы от тех же двенадцати вольт, и схемка бала спаяна, но не хотелось городить защиту от индукции. Повторюсь, датчики Холла размещены по схеме «ЁЖкин dead time». Эта компоновка оберегает полумост от сквозных токов.
Перед подключением при помощи нагрузки, двигателя от шуруповерта, проверил переключение фаз полумостов от датчиков Холла вращая ротор.
Не увидев никаких недостатков, подключил сначала питание в 12В. Двигатель без проблем плавно запустился и набрал обороты от потенциометра.

Погоняв его немного, я поднял напряжение до 24В. Ну что вам сказать? На минимальных оборотах крутит устойчиво. На повышенных, хрен остановишь. Вибрация полностью отсутствует. Обороты ротора регулируются от минимума, до максимума. Сколько максимальных оборотов выдали двадцать четыре вольта, не знаю, не имею такого приборчика. Но на вскидку, думаю около 1700-1800 .

Если кому интересно, когда и как буду делать реверс, отвечаю, в ближайшее время, там ничего сложного нет. Нужно перебрасывать концы Холлов так, чтобы не левая катушка статора притягивала южную сторону магнита, а правую. Это переключение у меня будет делать Arduino Uno.
 Спасибо за внимание.
Спасибо за внимание.