

Всем привет! Хочу представить на ваш суд очередную мою находку.
https://vk.com/wall232715610_47
Работая над своим проектом, мне удалось удачно решить некоторые рабочие моменты, а именно:
- 1 - собрать экспериментальную, действующую модель bldc двигателя и разобраться как он работает (эту конструкцию двигателя я позаимствовал у самодельщика ХУМЫ)
- 2 – я придумал, изобрел, нашел, это можно как угодно назвать, как избавиться от короткого замыкания в полумостах при переключении мосфетов очень простым и дешевым способом.
- 3 – ну и конечно запустил двигатель, спаял электронику, в которую добавил ШИМ на НЕ555, да, да, самый обыкновенный, всем широко известный ШИМ.
Он имеет широкое распространение от увеличения яркости свечения ламп, до регулировки вращения коллекторных двигателей. Даже я его применил для тестового двигателя BLDC.
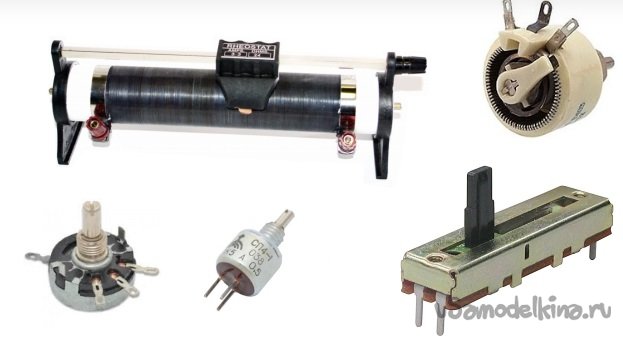
Обороты моего двигателя, меняются путем вращения ручки переменного резистора. И вот этот переменный резистор имеет маленькие и в тоже время неприятные недостатки:
- По контактной пластине трется третий подвижный контакт. Спустя время, даже если эксплуатация потенциометра ограничена, например в звуковой аппаратуре, в динамиках слышны, при регулировке, шумы и треск. Это плохой контакт, который может влиять на стабильность работы двигателя.
- Вращение ползунка почти 150 градусов.
Плавная регулировка оборотов двигателя в моем проекте не нужна, при движении на любой неровности, двигатель будет работать рывками, то ускоряясь, то замедляясь. Чтобы убрать «дребизг» в работе двигателя нужна шаговая регулировка, нужен переменный резистор, собранный из нескольких сопротивлений, спаянных последовательно. Что бы получилось шаговое переключение оборотов на четыре – пять позиций. Ну скажем, первая позиция – началось медленное движение. Следующие позиции – продолжают увеличение движения, а последняя – разгоняет на всю мощность, не давая провалиться вперед наезднику, ну как-то так.
Встал вопрос, как и чем производить переключение сопротивлений. Первую свою версию собрал на датчиках Холла и герконах. Я рассказывал об этом в статье «Электро-механический переменный резистор для ШИМ на NE555».
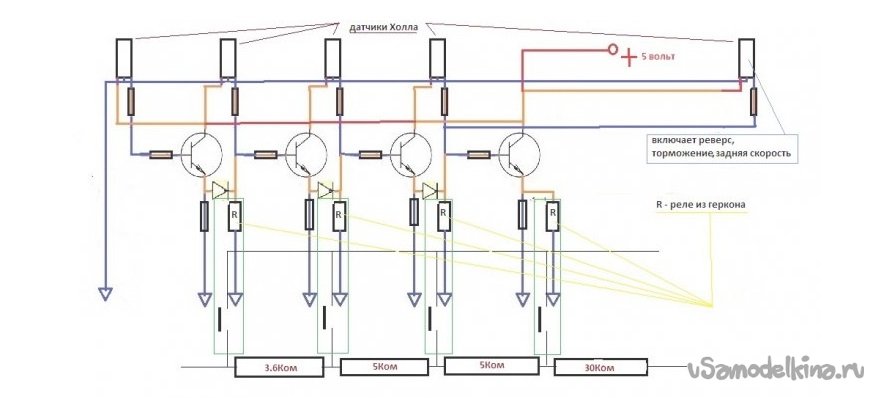

Но как-то тяжеловато этот вариант выглядит, хотя вполне рабочий, опять же надо запитать катушки, короче – отложил. Попробовал магнитом обрабатывать герконы напрямую, опять засада. Магнит включал геркон в одном положении, а выключал в другом. Получалось либо наслоение включений, либо разрыв.
Полез в интернет, вариантов честно сказать не мнего. Первое, что нашлось, электронное сопротивление. Вещь хорошая, но от 160 шагов переключений и выше. И работает единицами или нулями.
Нашел у себя слегка потрепанную, но рабочую микросхему К547КП1. На вид то, что искал. Четыре ключа, попробовал на одном, микросхему запитал одним аккумулятором, ключ другим и визуально увидел, работает ключ. Но опять невезуха, когда впаял резисторы, они стали жить каждый своей жизнью, то переключались как надо, то забивали на команды и оставались дружно открытыми.


Полностью разочаровавшись в микросхеме, пошел далее бороздить просторы интернета. Многие авторы пытались, как и я, решить эту неразрешимую задачу, но потом соглашались использовать другие варианты китайского творчества, а не ШИМ на НЕ555.
Я же напротив продолжал стучаться в закрытую дверь, дабы не усложнять то, что уже собрано. Я начал экспериментировать с платой ШИМ.

И вы знаете, если долго и настойчиво стучаться, то дверь может и открыться.

То, что я нашел такой выход из сложившегося положения, возможно уже кем-то найден и кем-то используется, я соглашусь с этим, уж больно все просто. Но тогда этот, кто то, очень скрытный и жадный человек, все спрятал.
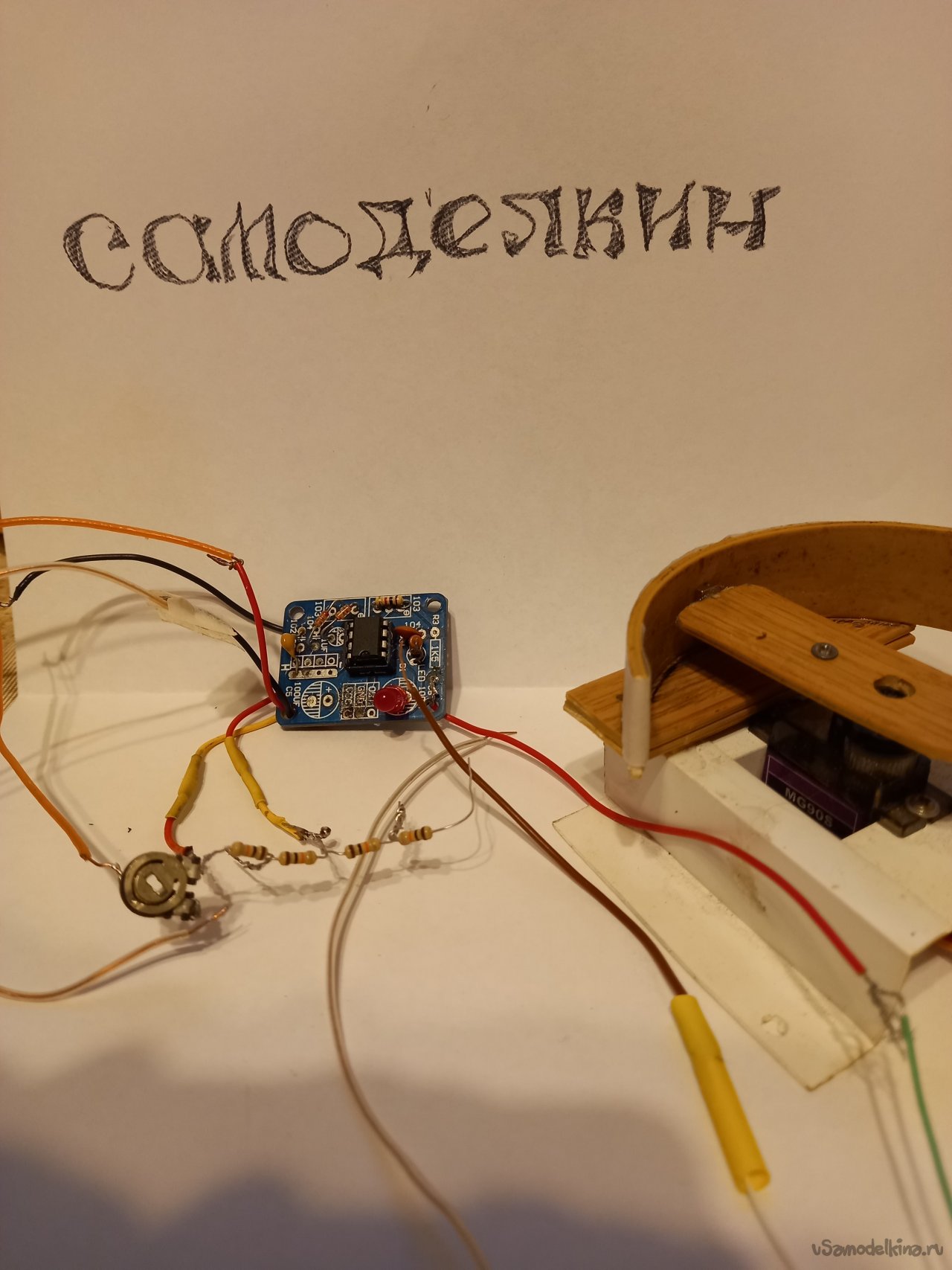
Как этот вариант подключения работает? Какая разница! Вариант рабочий и вот так это выглядит.
В саму схему ничего дополнительно не вносил, а вот переменный резистор убрал.
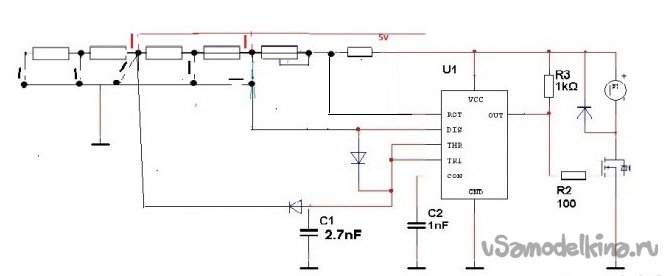
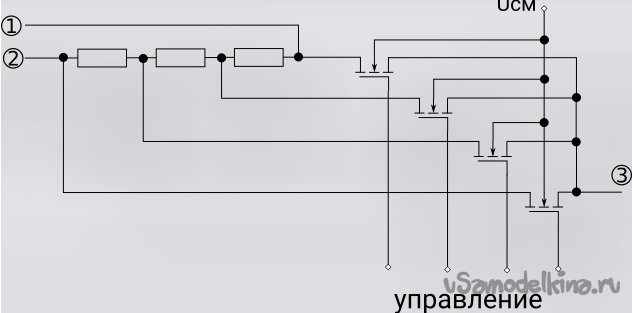
Вместо него у меня подстроечный и четыре постоянных резистора по 10К, спаянные последовательно. К первому контакту припаял провод, идущий от ШИМ (смотреть на схеме), на второй контакт припаял средний провод бывшего переменного резистора, на четвертый контакт, провод идущий от диода ШИМ.

На второй контакт, спаянных резисторов, с датчика Холла, при подключении питания, поступает «1». ШИМ переходит в режим ожидания, на выходе 1.2 вольта. При поступлении «1» на четвертый контакт, на выходе получаем 3 вольта. Благодаря подстроечному резистору, имеется возможность подогнать напряжение, чтобы двигатель, после мосфета начал движение.
Когда управляющий сигнал полностью отсутствует, выходное напряжение на выходе с ШИМ имею 4 вольта. Далее с датчика Холла сигнал «0» подключается к шестому контакту, на выходе 4.6 вольт. Следующий сигнал «0» поступает на пятый контакт – 6.6 вольт, потом следующий на четвертом –8.9 вольт, на третьем – 12 вольт. Для каждого контакта свой датчик Холла
В моем случае, «1» и «0», будут выдавать датчики Холла под воздействием перемещающегося магнита, который размещен на сервомоторе.


Где это можно применять еще, да хотя бы ручка газа для электрических велосипеда, или для детских автомобильчиков с коллекторными двигателями. Да мало ли где, где применяется ШИМ.
Вот так у меня получилось электронное или электрическое переменное сопротивление, как это назвать, мне ровным счетом все равно. Главное, то, что регулировать напряжение можно, пусть и ступенчато. Ну, а наборы сопротивлений, под разные шаги переключений, каждый может подобрать индивидуально.
Но самое главное, при эксплуатации ШИМ на НЕ555, в переменном резисторе нет трущихся элементов.


