


Недавно я описывал изготовление универсального гусеничного шасси. Сегодня я хочу подробнее рассказать о подключении к нашему шасси Bluetooth модуля. А вот и собственно он сам:

Для реализации этой самоделки понадобится изготовить шасси. Подробное изготовление, которого описано здесь
Кроме этого нужно следующее:
- Bluetooth модуль HC-XX (или его клоны)
- Android телефон
- Соединительные провода «мама – мама»
Шаг 1 выбор модуля.
Bluetooth модулей существует много. И у всех разные характеристики. Вкратце список выглядит так:
- HC-03, HC-04(HC-04-M, HC-04-S) на чипе BC417143 – для промышленного применения;
- HC-05, HC-06(HC-06-M, HC-06-S) на чипе BC417143 – для коммерческого применения;
- HC-05-D, HC-06-D (с отладочной платой для оценки и тестирования);
- HC-07 – модуль с чипом CSR 41C6, предназначен для замены HC-06 (полностью с ним совместимый);
- HC-08 – модуль с ультра низким энергопотреблением и протоколом Bluetooth 4.0;
- HC-09 – самый новый модуль, предназначенный для замены HC-06 и HC-07.
Краткие характеристики модулей:
- чип Bluetooth – BC417143 производства
- протокол связи – Bluetooth Specification v2.0+EDR;
- радиус действия – до 10 метров (уровень мощности 2);
- совместимость со всеми Bluetooth-адаптерами, которые поддерживают SPP;
- объем flash-памяти (для хранения прошивки и настроек) – 8 Мбит;
- частота радиосигнала – 2.40 .. 2.48 ГГц;
- хост-интерфейс – USB 1.1/2.0 или UART;
- энергопотребление – ток в течение связи составляет 30-40 мА. Среднее значение тока около 25 мА. После установки связи потребляемый ток 8 мА Режим сна отсутствует.
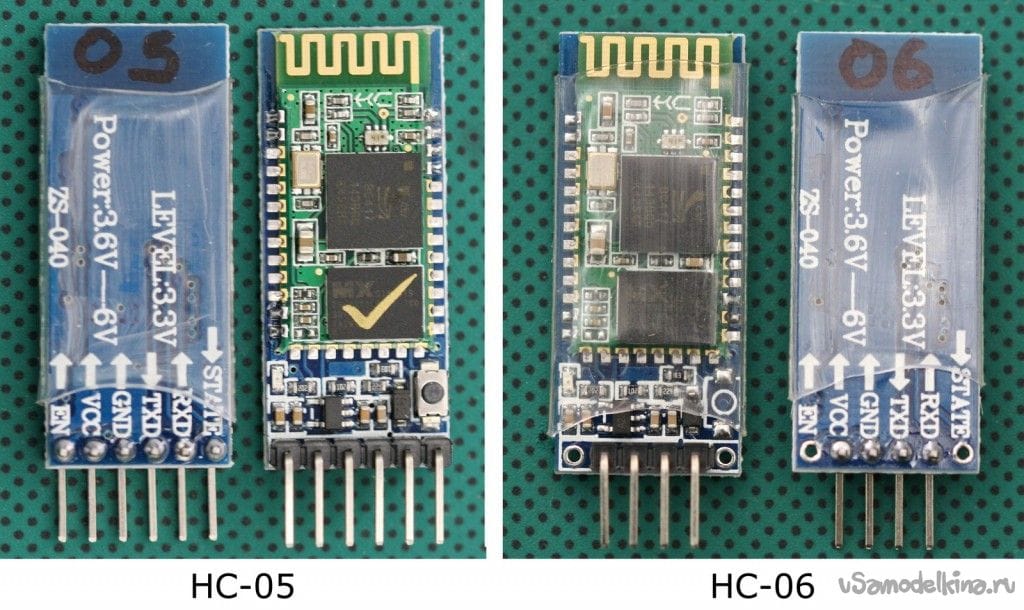
Самыми доступными на сегодня Bluetooth модулями можно назвать HC-05 и HC-06. Они в изобилии присутствуют в Китайских онлайн-магазинах. Отличия между ними в том, что первый может работать как в режиме ведущего (slave), так и в режиме ведомого (master). Второй же является чисто ведомым устройством. Другими словами, HC-06 не может сам обнаружить парное устройство и наладить с ним связь, он может лишь подчиниться ведущему.
Обычно модули продаются в виде двух спаянных вместе плат. Меньшая из них — заводской модуль, широко используемый в разных электронных устройствах. Большая — специальная макетная платка для DIY. Так выглядит меньшая плата с чипом BC417:

А так сами DIY модули HC-05 и HC-06:
В принципе можно использовать любой понравившийся вам модуль. Модуль без макетной платы стоит дешевле, но тогда придется позаботиться о питании 3.3 V для модуля и помучится, припаивая к модулю провода, так как выводы находятся очень близко. Я выбрал оптимальный, на мой взгляд, в соотношении цена\функционал HC-06.

Шаг 2 подключение.
Соединяем следующим образом:
Arduino Nano Bluetooth
D7 – RX
D8 – TX
5V – VCC
GND – GND
Для удобства приклеиваем модуль на двусторонний скотч в шасси:

Шаг 3 настройка модуля.
Для правильной работы модуль надо настроить. Настройку будем производить AT командами вводимыми в окно терминала. Я привожу пример настройки модуля HC-06. Если у вас будет другой - настройки могут отличатся. Чтобы наш модуль получал команды, вначале прошиваем Arduino следующей прошивкой:
В данном случаем Arduino выступаем в роли моста между компьютеров и модулем. В прошивке я использую библиотеку SoftwareSerial. На высоких скоростях она работает нестабильно. Если хотите высокой скорости, можно подключить модуль напрямую к RX и TX контактам Arduino и переписать прошивку. Но в моем случае мы будем работать с модулем на скорости 9600. На мой взгляд этого достаточно. Итак после прошивки, открываем терминал и вводим:
«AT» (без кавычек) должен прийти ответ «OK» (значит всю подключено верно и модуль работает).
«AT+BAUD96000» (без кавычек) должен прийти ответ «OK9600».
Если пришел нужный ответ, переходим к следующему шагу.
Шаг 4 прошивка.
Для написания прошивки и собственно прошивки я пользуюсь Arduino IDE. Актуальная версия на сегодняшний день 1.8. Я выкладываю несколько вариантов прошивки:
BT_RobotControl – для программы Robot Control на Android
BT_WASD – для управление с компьютера, отправляя команды через терминал.
Шаг 5 настройка телефона.
На Android телефон надо установить программу для управления роботом через Bluetooth. Их достаточно много. Можно ввести в Google play «Bluetooth Arduino» и выбрать на свой вкус. Мне понравилась BT Controller. Скачиваем и устанавливаем на телефон или планшет на Android. Далее, через настройки Android, надо установить соединение с нашим модулем. Пароль для соединения «1234» или «0000».
Шаг 6 настройка компьютера. (если надо)
При необходимости или просто удобства для управления можно использовать компьютер или ноутбук. Для этого на компьютере должен быть Bluetooth. Устанавливаем связь с нашим модулем, через средства управления на компьютере. Далее нам нужен терминал для отправки команд. Любой удобный для вас. Записав прошивку BT_WASD, управление производится следующими кнопками (командами):
w – вперед
e – влево и вперед
q – вправо и вперед
s – назад
z – назад и влево
x – назад и вправо
a – влево на месте
d – вправо на месте
f – стоп
Постоянно вводить команды неудобно, поэтому рекомендую использовать программу, для отправки команд. Я использую Z-Controller. В программе надо выбрать порт (com порт через который происходит соединение) и настроить клавиши на команды. Настройка простоя и интуитивная.
Надеюсь вам было интересно и полезно.
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.


