


Здоровья и удачи вам, решившим потратить время на прочтение этого текста!
Захотелось мне тут как-то сделать восьмиколесный вездехода а-ля «Луноход», и вот что получилось:



Конструкция движущего узла.
Конструкция движущего узла представляет собой качающуюся тележку с двумя колесами, вращающий момент на которые передается от мотор-редуктора ТТ посредством зубчатой передачи. Таких узлов соответственно четыре – по два на каждую сторону модели.
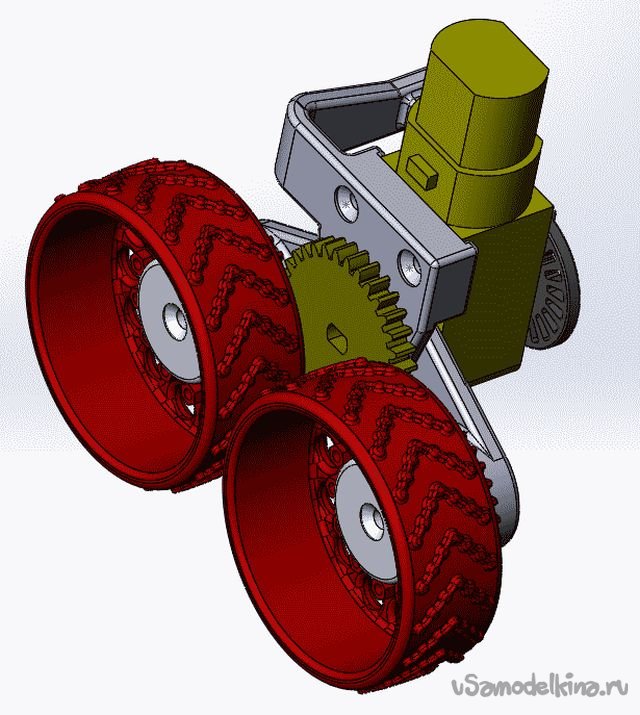
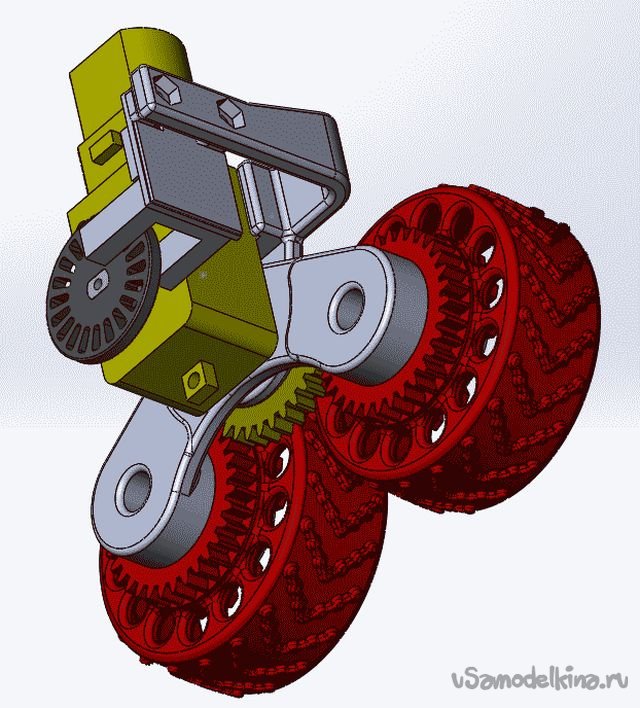
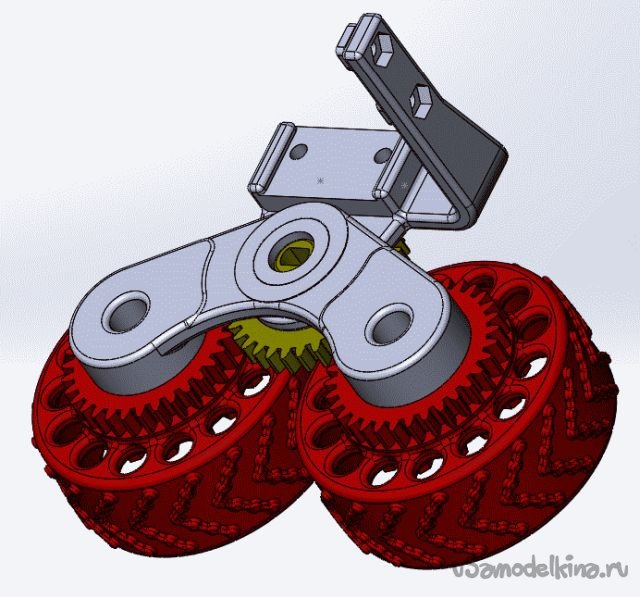
Вид со снятым колесом и приводной звездочкой. Вид со снятым мотор-редуктором и оптопарой.
То же, уже в натуре:
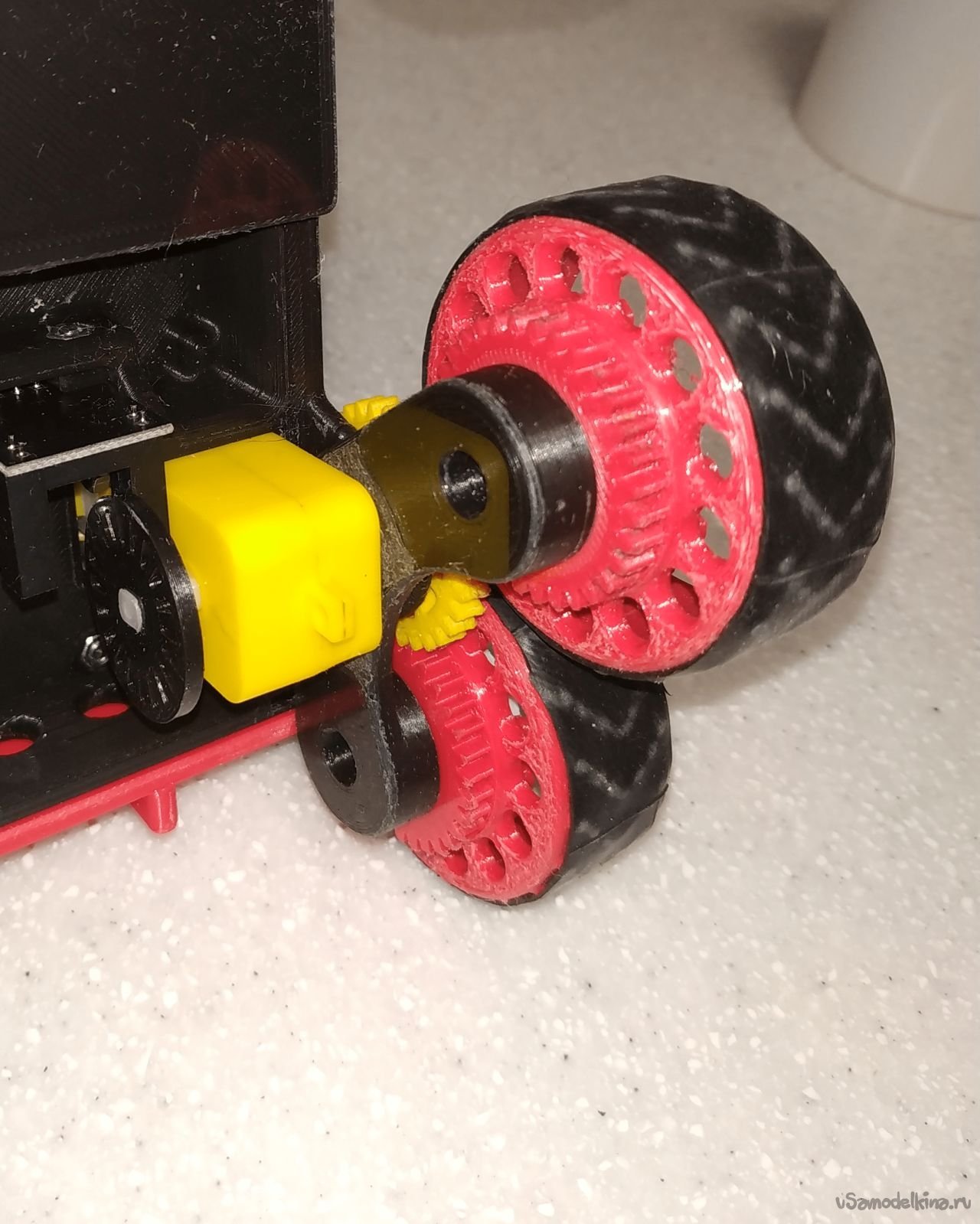
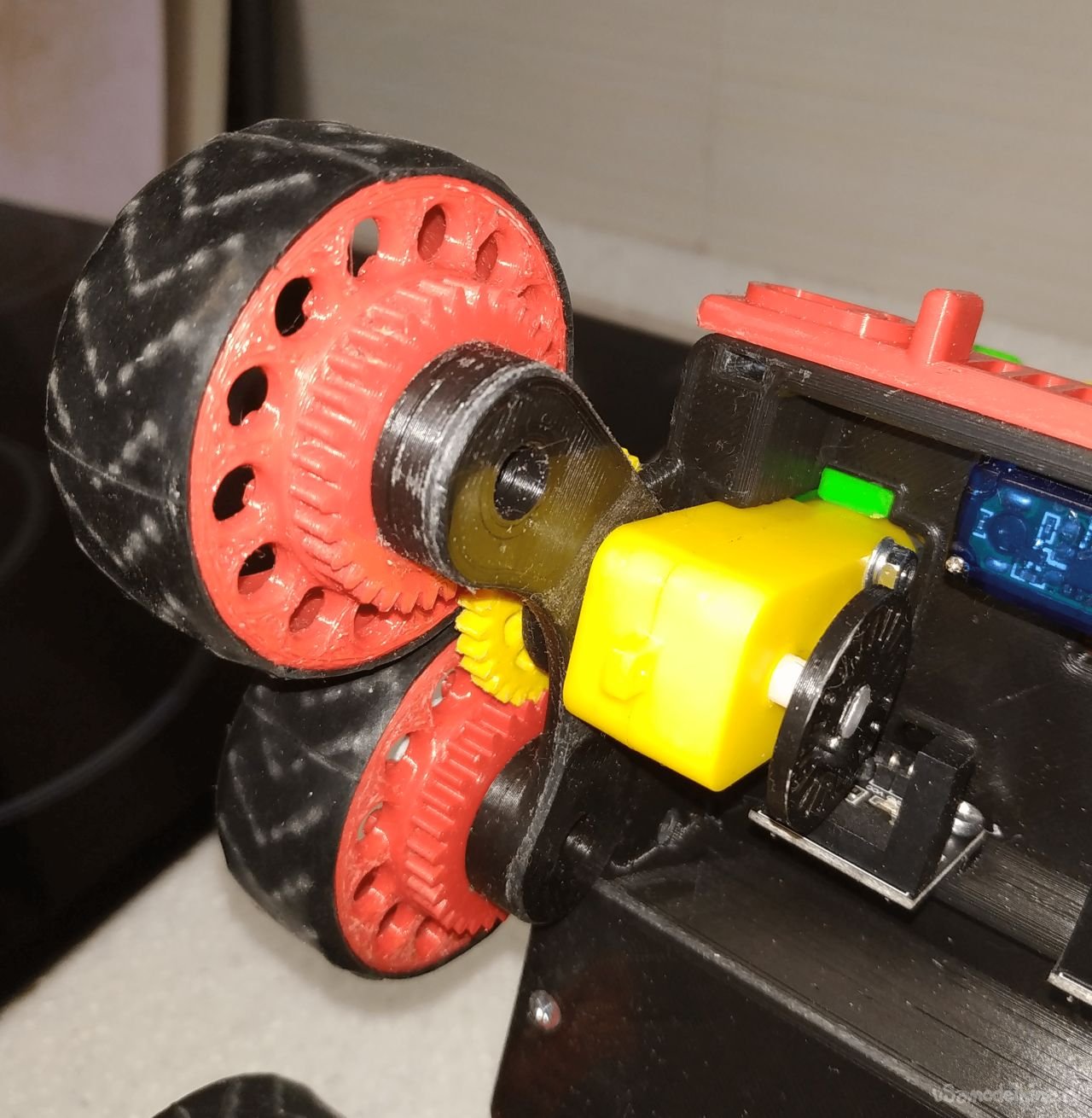
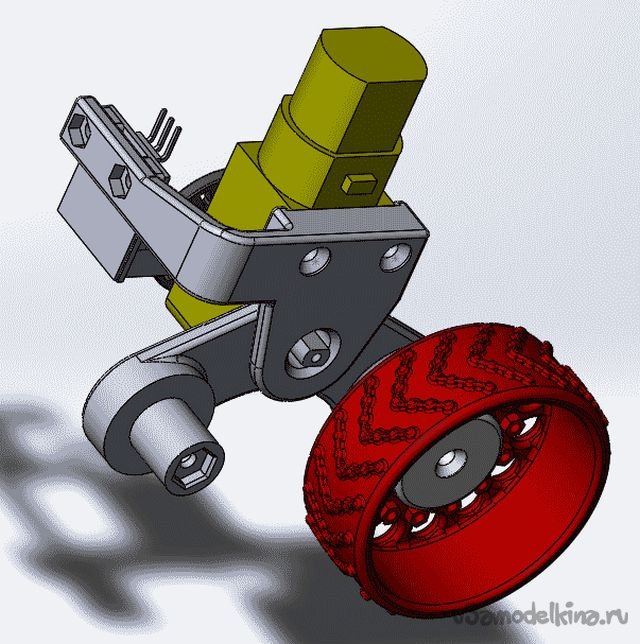
На фото видно – для предотвращения проскальзывания на каждое колесо натянуты резиновые покрышки из велосипедной камеры
Для каждого двигателя предусмотрена обратная связь посредством оптопары и перфорированного диска. Перфорированные диски установлены на валах мотор-редукторов.
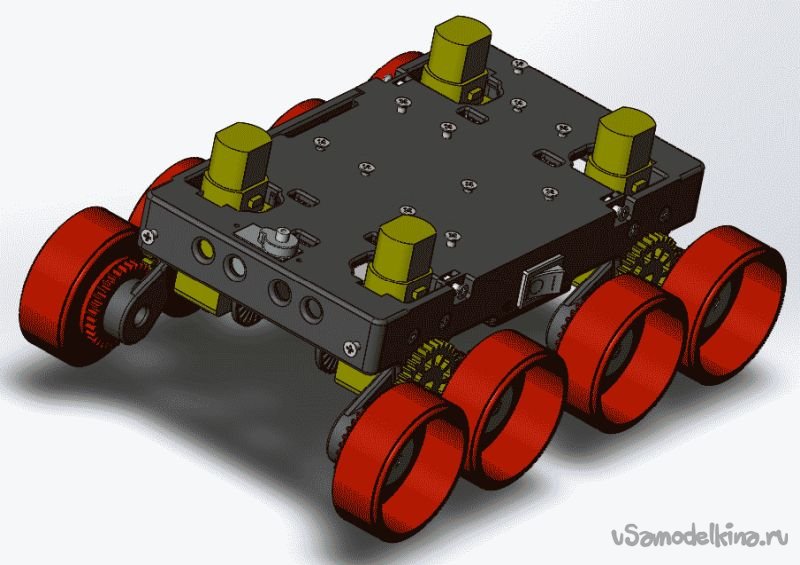
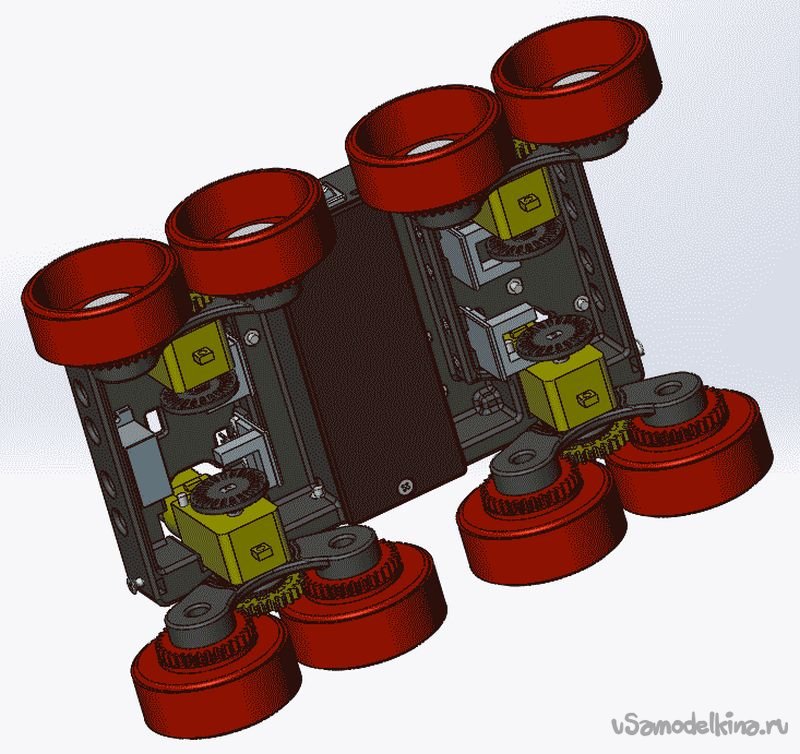
Общая конструкция ходовой части.
Общий вид сверху:
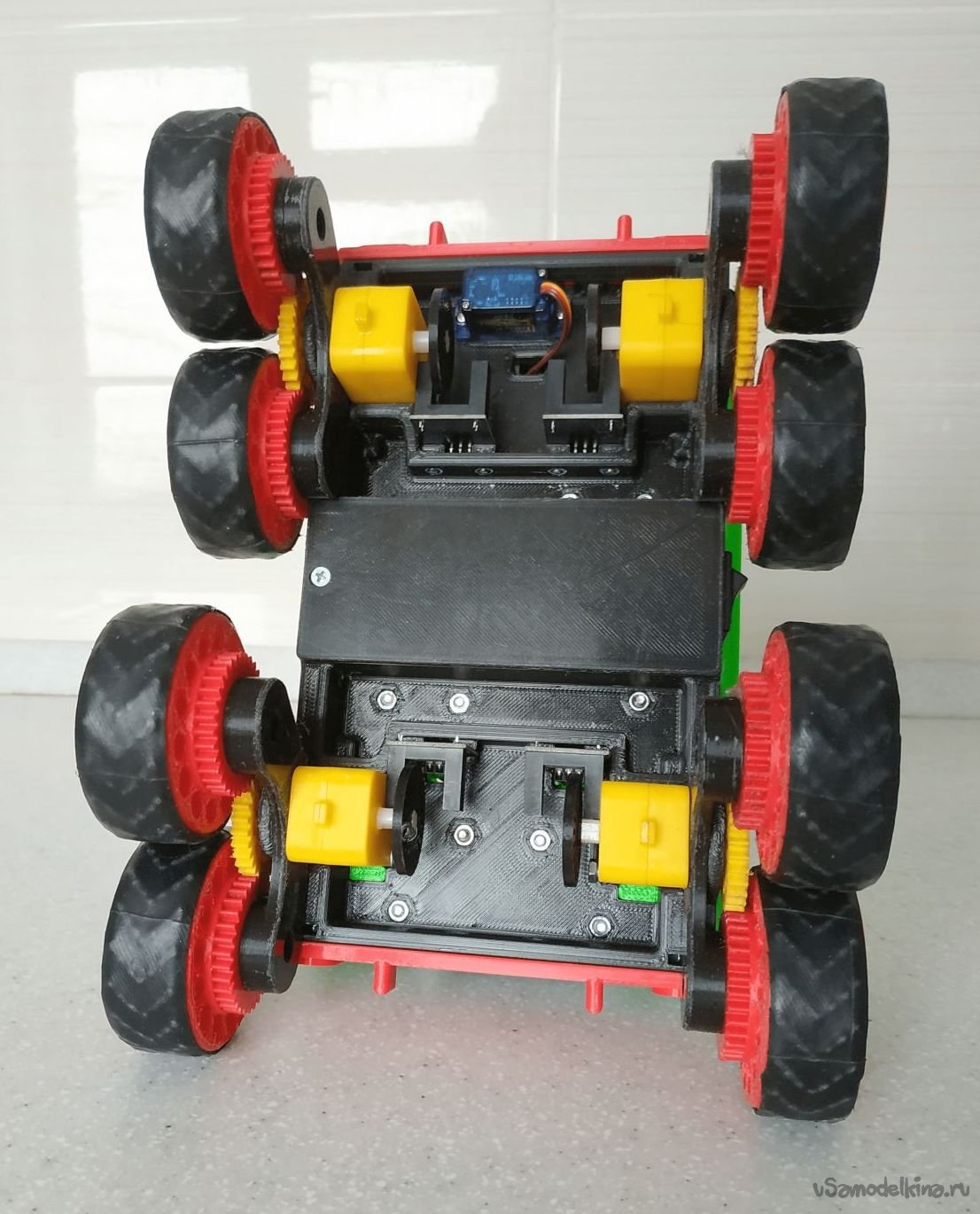
Общий вид снизу:
То же, уже в натуре:
Система управления.
Управление машинкой осуществляется банально – по «танковой» схеме, изменением частоты и направления вращения двигателей колес левой и правой стороны посредством пульта от PS2.
Подразумеваются два режима управления: ручной и автоматический.
При ручном режиме управление осуществляется посредством пульта.
Автоматический режим подразумевает, что машинка едет прямолинейно до обнаружения препятствия. При обнаружении препятствия машинка откатывается назад, выбирает направление последующего движения по случайному закону и двигается дальше до обнаружения следующего препятствия. Далее все повторяется.
Для обнаружения препятствий, в передней части корпуса находится сервопривод, на оси которого закреплен кронштейн с УЗ-дальномером HC-04, который во время движения в автоматическом режиме поворачивается туда-сюда в пределах угла ≈120°.
Принципиальная схема:
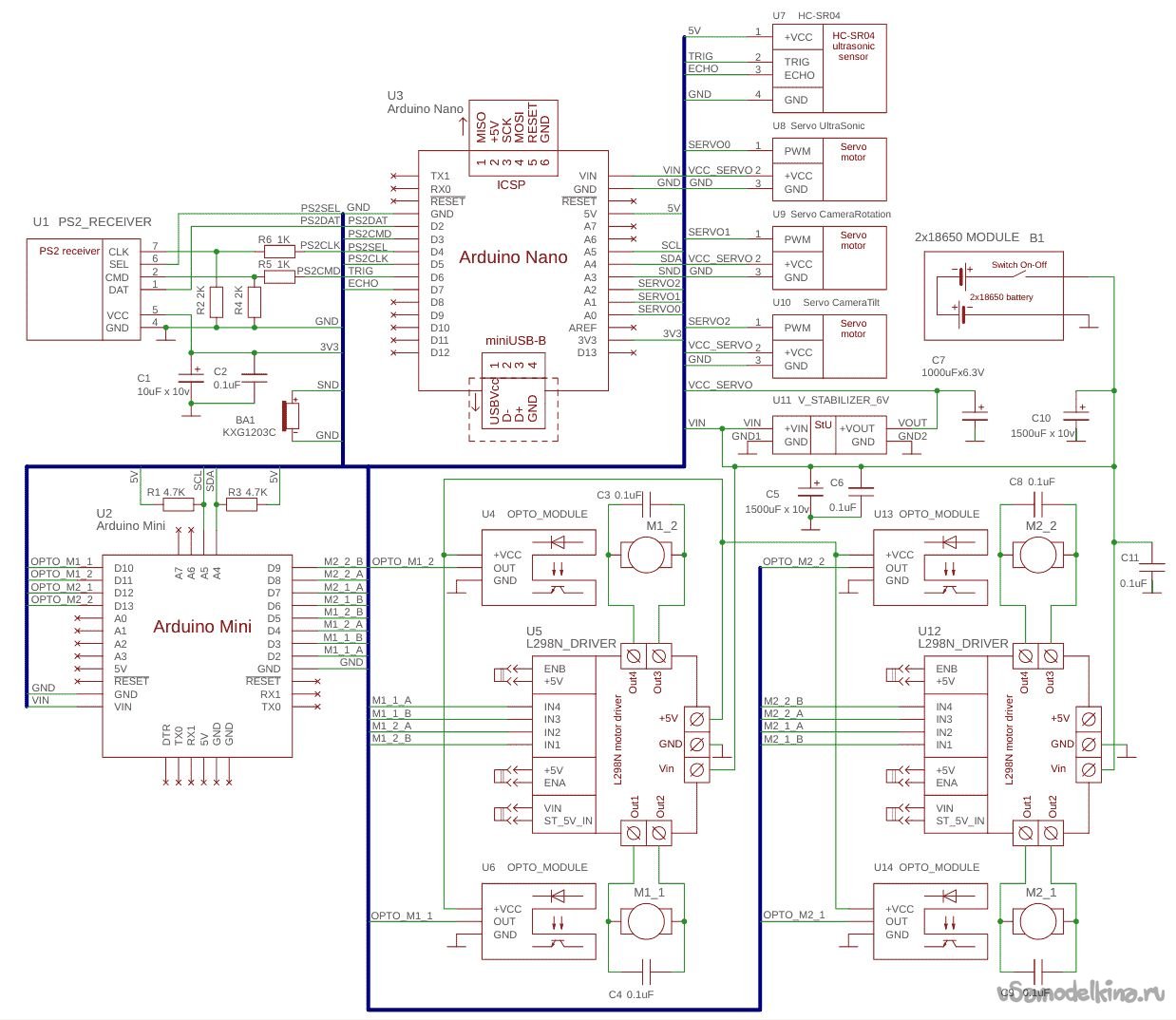
Питание модели осуществляется двумя аккумуляторами 18650.
В двигателях применена обратная связь через оптопары U4, U6,U13,U14 и перфорированные диски на валах. Понятное усложнение с лихвой окупается более стабильным управлением движками. Управление моторчиками осуществляется посредством ШИМ, для чего применены модули U5 и U12 с микросхемами 2х-канальных Н-ключей L298N и отдельный контроллер U2 “Arduino Mini”. Выделить отдельный контроллер для управления движками пришлось из-за того, что для обратной связи были задействованы аппаратные прерывания, что конфликтовало с библиотекой управления сервоприводами.
Основное управление реализовано на контроллере U3 “Arduino Nano”. Этот контроллер осуществляет связь с приемником от PS2 U1, управляет сервоприводами U8 – U10, реализует логику автоматического режима движения и через канал I2C управляет контроллером двигателей.
Сервоприводы U9 и U10 предназначены для управления положением камеры. О камере разговор пойдет позже.
Резисторы R1 и R3 – подтяжка сигнальных линий I2C.
Резистивные делители R2, R6 и R4, R5 обязательны, если у вас приемник PS2 с питанием 3,3В, Если приемник с питанием 5В, делители не нужны, и все выводы приемника можно соединять с контроллером напрямую.
Прошивки для контроллеров приложены в сопутствующих файлах и, на мой взгляд, исчерпывающе прокомментированы, поэтому о программной части системы управления читать там.
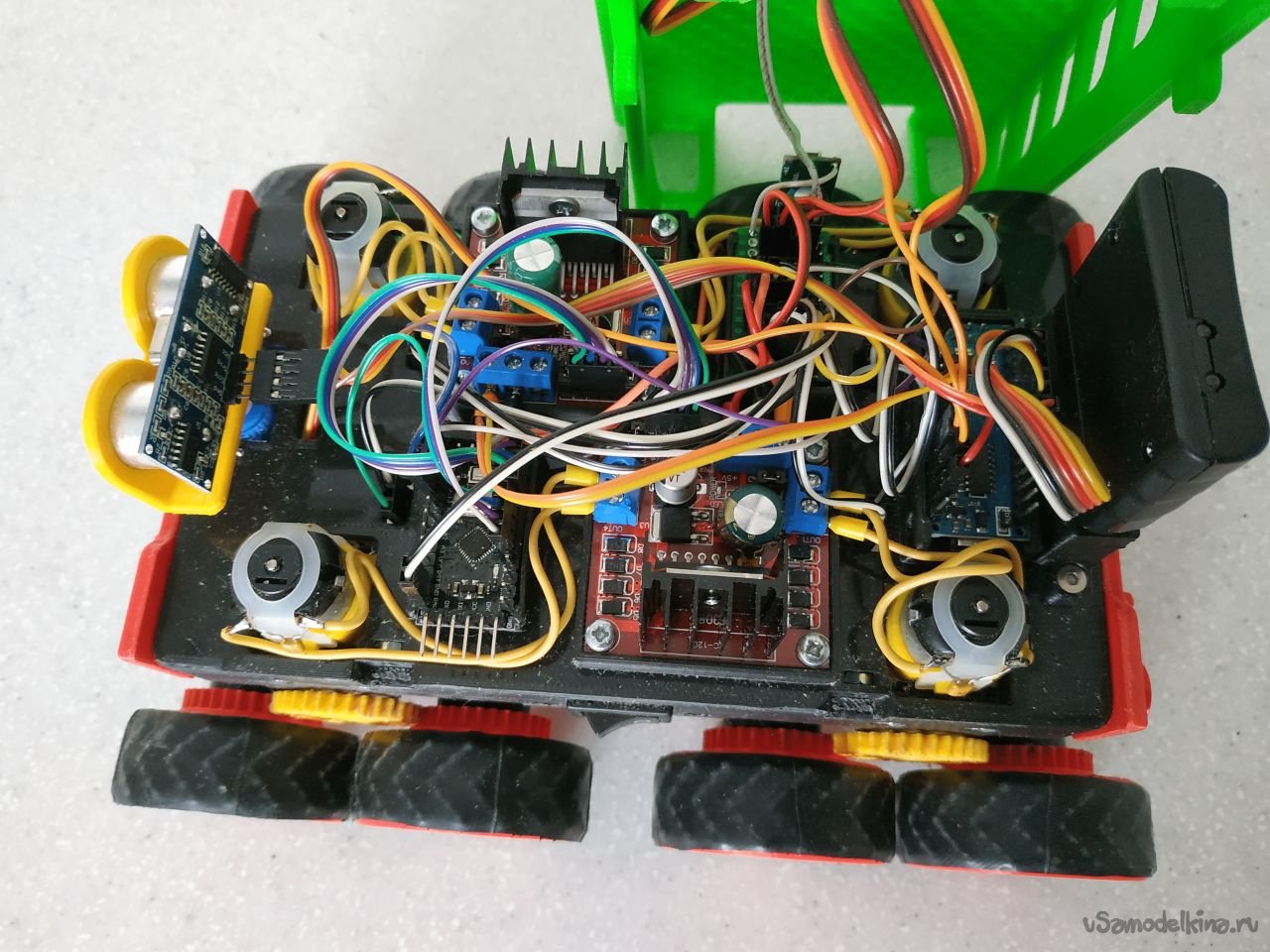
Вид модели со снятой кабиной (установлены все элементы системы управления):
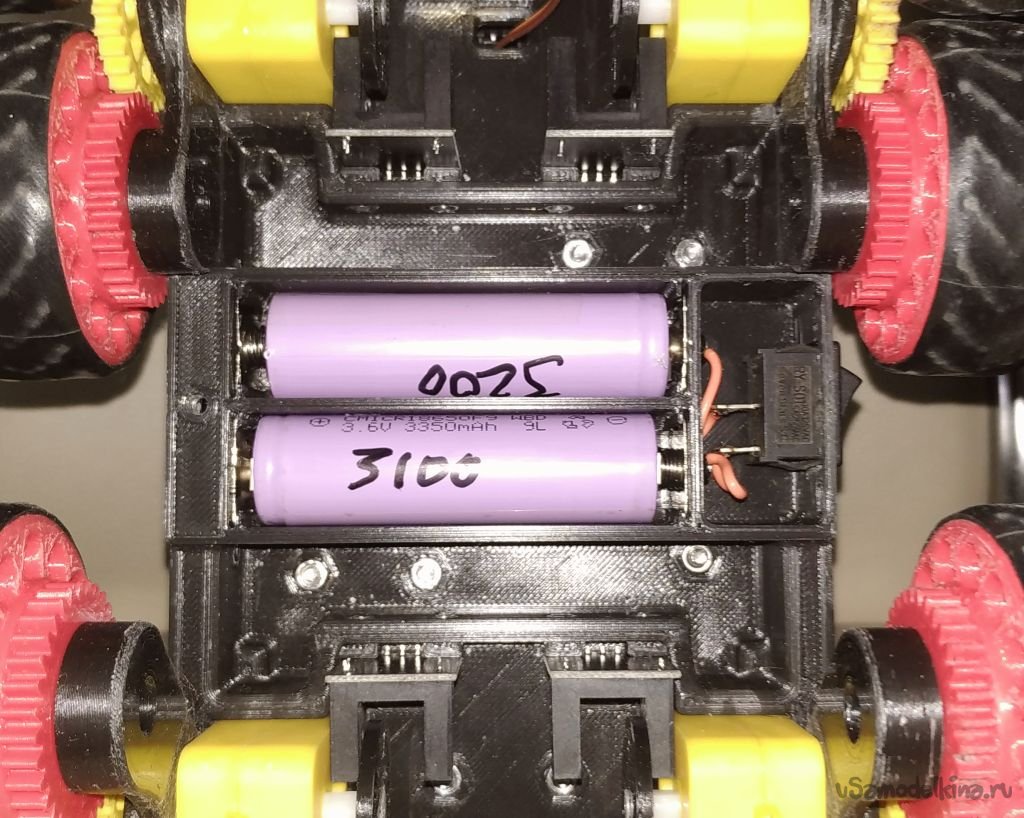
Вид на батарейный отсек (крышка снята):
Камера.
На крыше кабины модели установлена FPV-камера.
Камера применена купленная на Ali «широкоугольная FPV камера AKK TX04 PAL 5,8G 40CH 25MW VTX 700TVL 120°», вот такая:

Камера имеет возможность поворота в горизонтальной и вертикальной плоскости.
Конструкция держателя камеры:

Управление сервоприводами камеры выведено на кнопки кейпада (влево-вправо, вверх-вниз) джойстика PS2, кнопка “X” возвращает сервы в исходное положение.
Все детали модели распечатаны на принтере “Tronxy-D01” из ПЛА-пластика.
Все необходимые файлы можно скачать вот здесь: https://www.thingiverse.com/thing:6390309
А теперь видео:
Ну, вот на этом, собственно говоря, и все. Удачи!
