
Здоровья и удачи вам, решившим потратить время на прочтение этого текста!
Захотелось мне тут как-то сделать самоходную гусеничную платформу с дистанционным управлением и вот, взял да сделал.
Для начала, как обычно, пошарил в Интернете на предмет уже изобретенных велосипедов, и на thingiverse.com остановился на работах автора Tim Clark, а, конкретно, на вот этой https://www.thingiverse.com/thing:972768:
Ну, а дальше уже началось мое авторское издевательство над авторским замыслом, да простит меня Tim Clark.
Согласно моим представлениям о прекрасном:
- Гусеницы не должны быть гладкими, ибо игрушка будет играться в домашних условиях, то бишь, на полу линолеум или нечто подобное и пластик по пластику скользит достаточно хорошо, отсюда заносы, пробуксовки и т.д. и т.п.
- По тем же соображениям хотелось сделать на траках противоскользящие вставки из чего-нибудь резиноподобного, в качестве которых, было решено использовать мебельные самоклеящиеся накладки-демпферы для дверок.
- Очень хотелось понтов 3д-печатника, и сделать не сборные, а цельнонапечатанные гусеницы. Ага, тут меня догнала птица обломинго и унесла с собой достаточно много драгоценного безвозвратного времени и настроения. Оказалось, что межтраковые оси при приемлемых размерах, из того пластика, что у меня был, получаются крайне непрочными. Короче от этой хотелки пришлось отказаться на начальном этапе и вернуться к сборным гусеницам.
- У Tim Clark применена гусеница с тремя равновеликими катками. Я сначала тоже думал сделать также, но когда прикинул – не понравилось, т.к. клиренс получается очень низким. Поэтому, чтобы не получилась «пузотерка», было решено сделать гусеницу с четвертым приподнятым неопорным ведущим катком малого диаметра. Благодаря чему удалось поднять корпус над поверхностью достаточно высоко.
- Ну и последнее – прямое дистанционное управление, в качестве чего был применен пульт от PS2 и, мой любимый автоматический режим движения, когда робот, натыкаясь на препятствие, направление следующего движения выбирает по случайному закону.
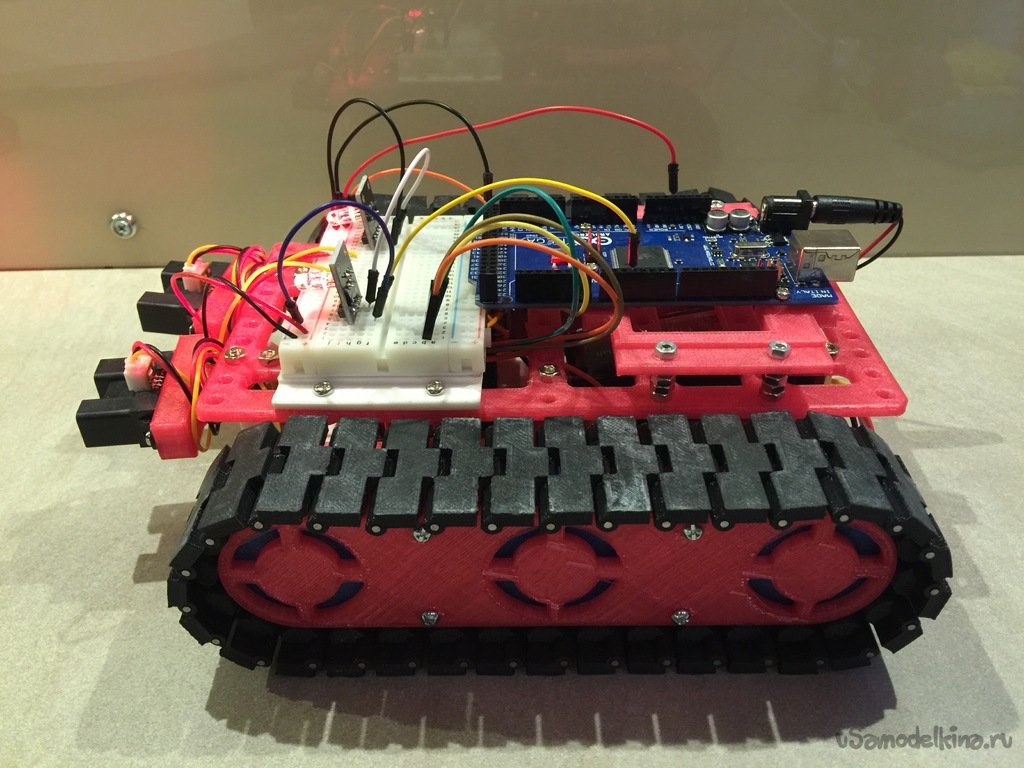
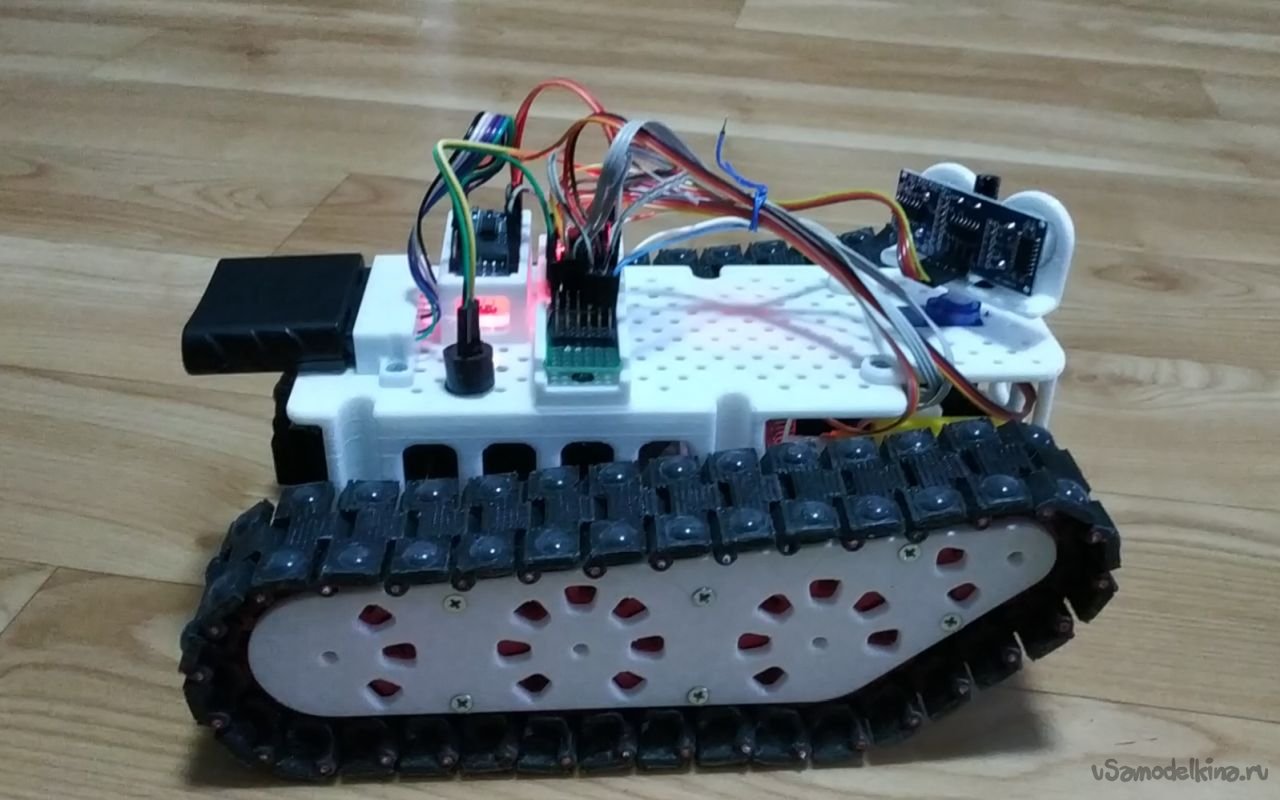
В конечном счете, получилось вот такое:
Гусеницы.
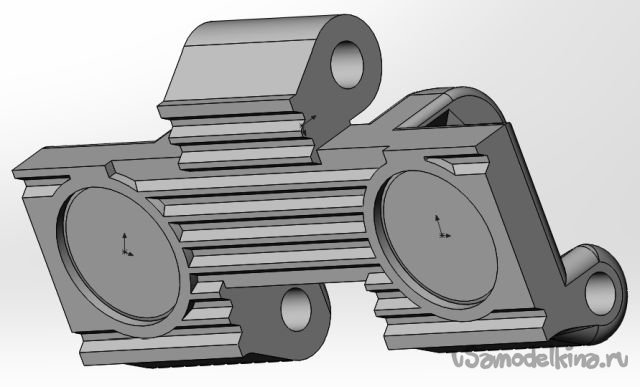
Итак, начнем с вешалки, пардон, с гусениц. Траки наших гусениц напечатаны из черного PLA и имеют такой вид:

Почему так? Как я уже говорил выше, хотелось сделать на траках противоскользящие вставки, в качестве которых, было решено использовать мебельные самоклеящиеся накладки-демпферы для дверок (диаметр 8мм). Вот такие:

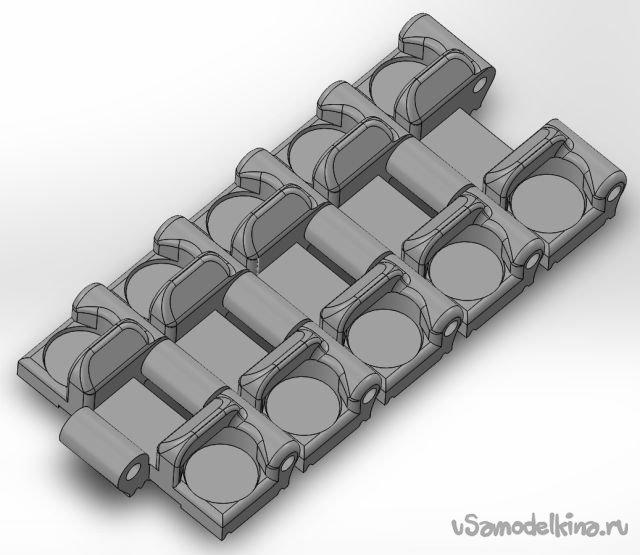
Под эти накладки в траках предполагалось сделать специальные углубления (0,5 – 0,6мм), в которые они и должны были вклеиваться. Но как оказалось, такие мелкие по глубине выемки не получается напечатать аккуратно и красиво, поэтому пришлось отверстия сделать сквозными и закрыть вклеенными с обратной стороны специально напечатанными пробочками.
При этом получаются аккуратные круглые углубления, куда четко встают самоклеящиеся накладки:


Для примера цепочка из 5-ти траков выглядит так:
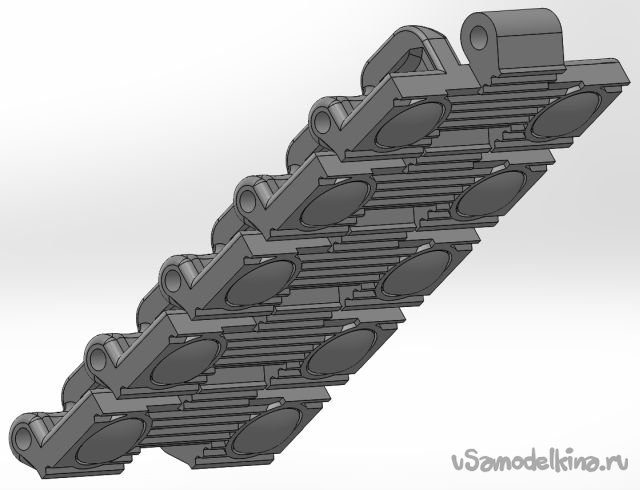
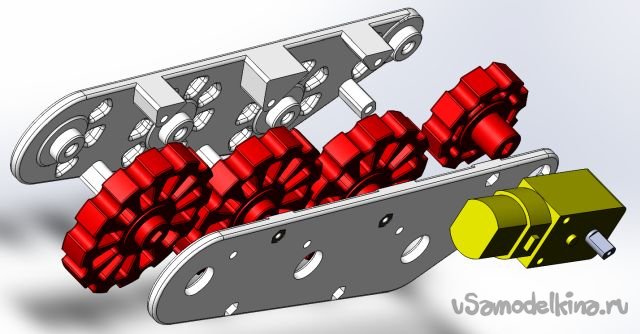
Траки соединены между собой пальцами из отрезков провода МГШВ-0,75, общее число траков 33 на гусеницу. Каждая гусеница приводится в действие своим мотор-редуктором ТТ.
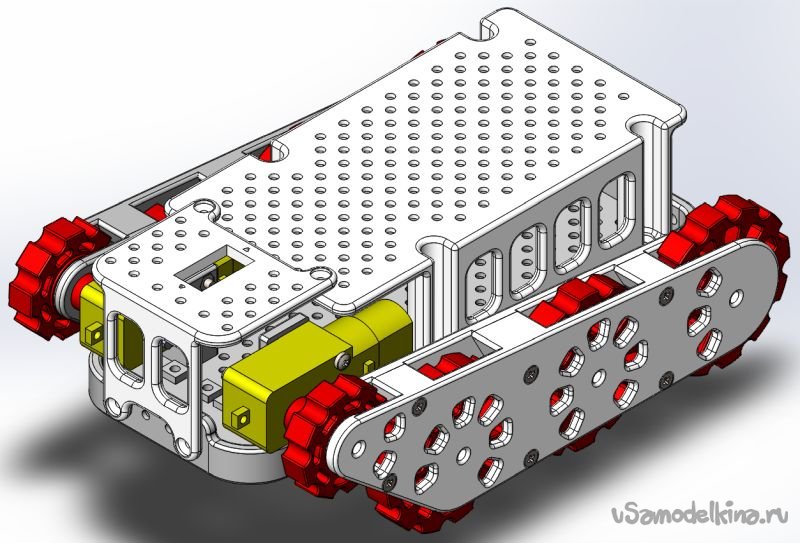
Общая конструкция
В общей конструкции ничего особенного нет и все понятно из приведенных рисунков.
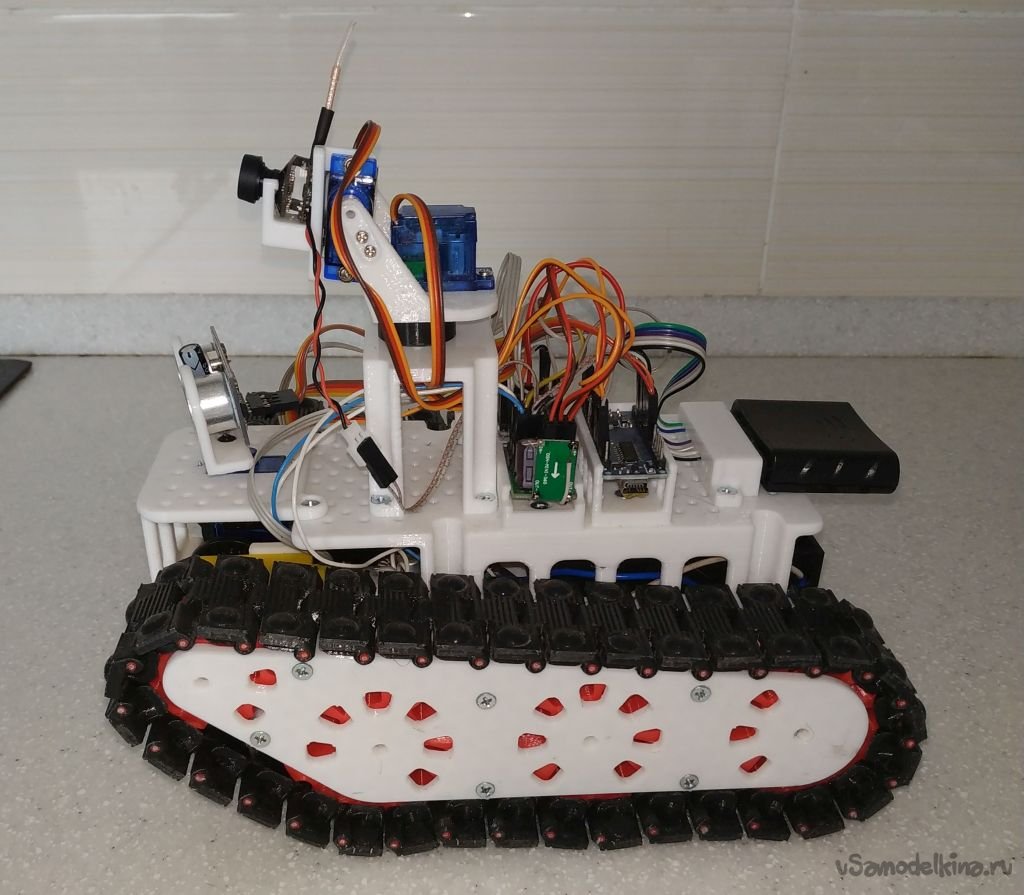
Общий вид:
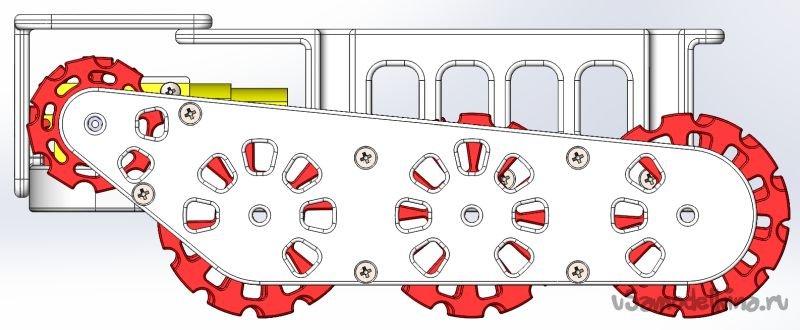
Вид слева:
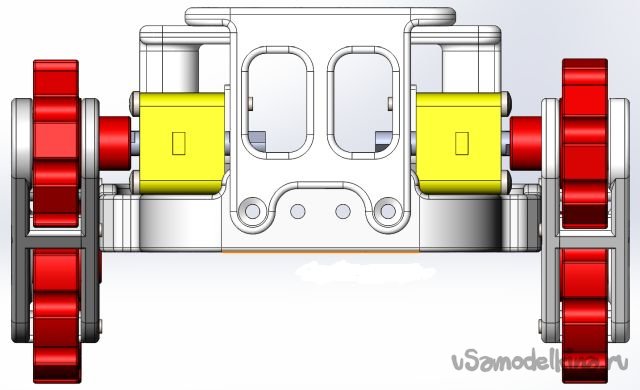
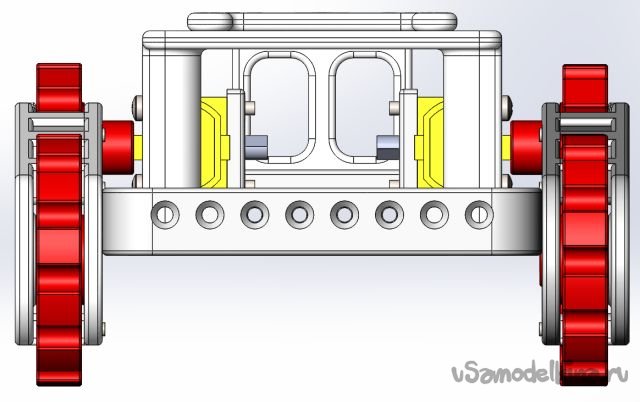
Вид спереди и сзади:
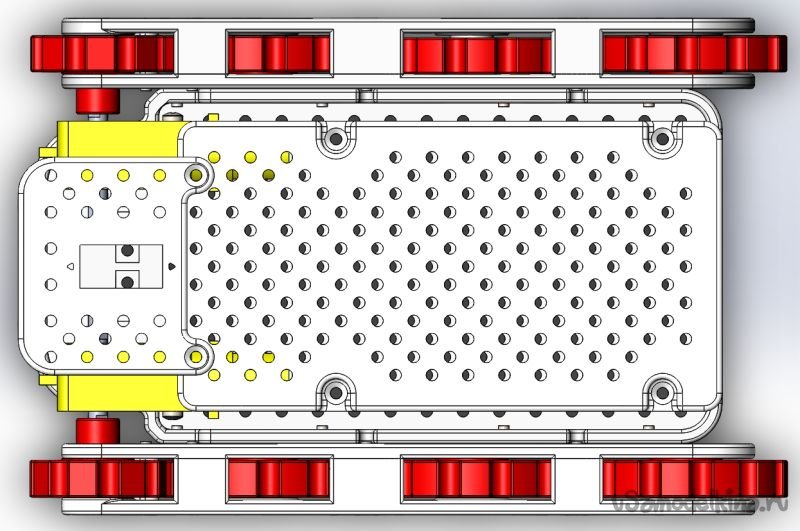
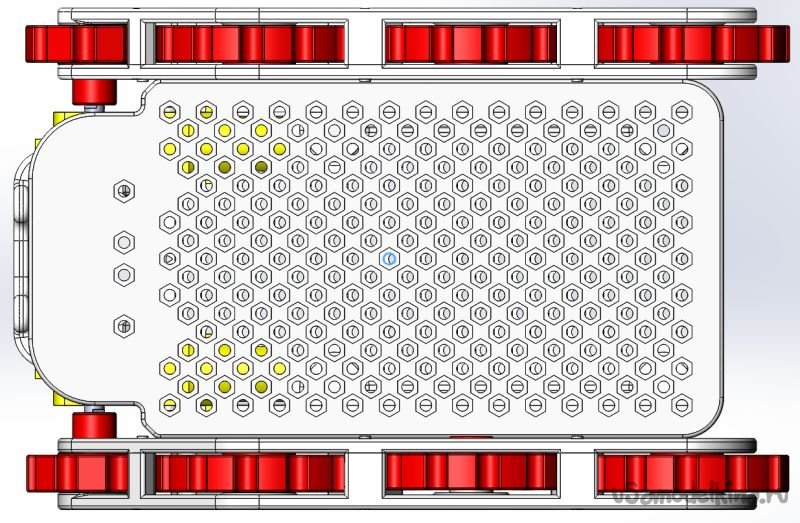
Вид сверху:
Вид снизу:
Гусеница в разборе:

В передней части корпуса находится сервопривод, на оси которого закреплен кронштейн с УЗ-дально-мером HC-04.
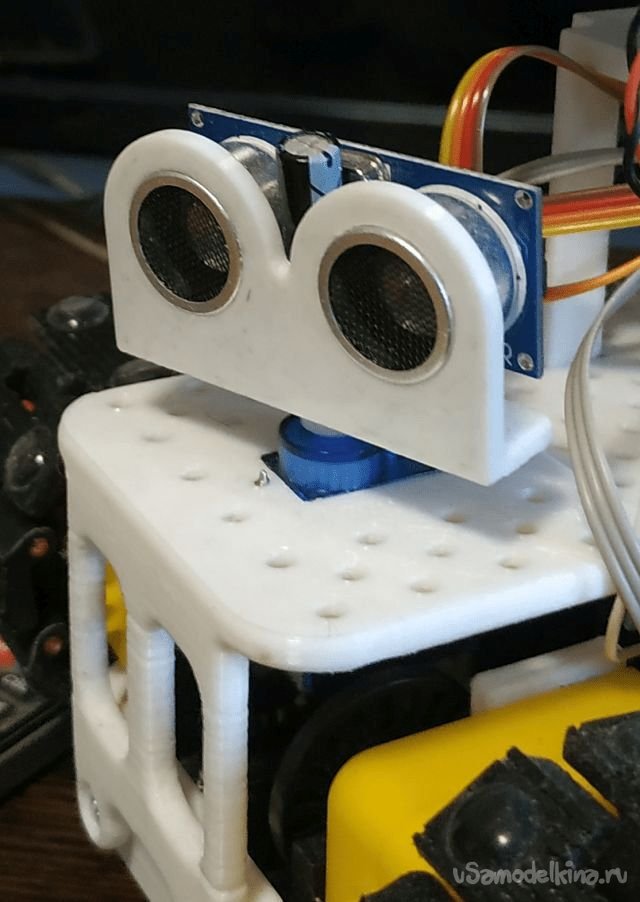
Предполагается, что во время движения в автоматическом режиме, дальномер поворачивается туда-сюда в пределах угла ≈120° для обнаружения препятствий.
Расположение остальных компонентов как-то не критично, поэтому сейчас заостряться на них не буду.
Система управления.
Принципиальная схема:
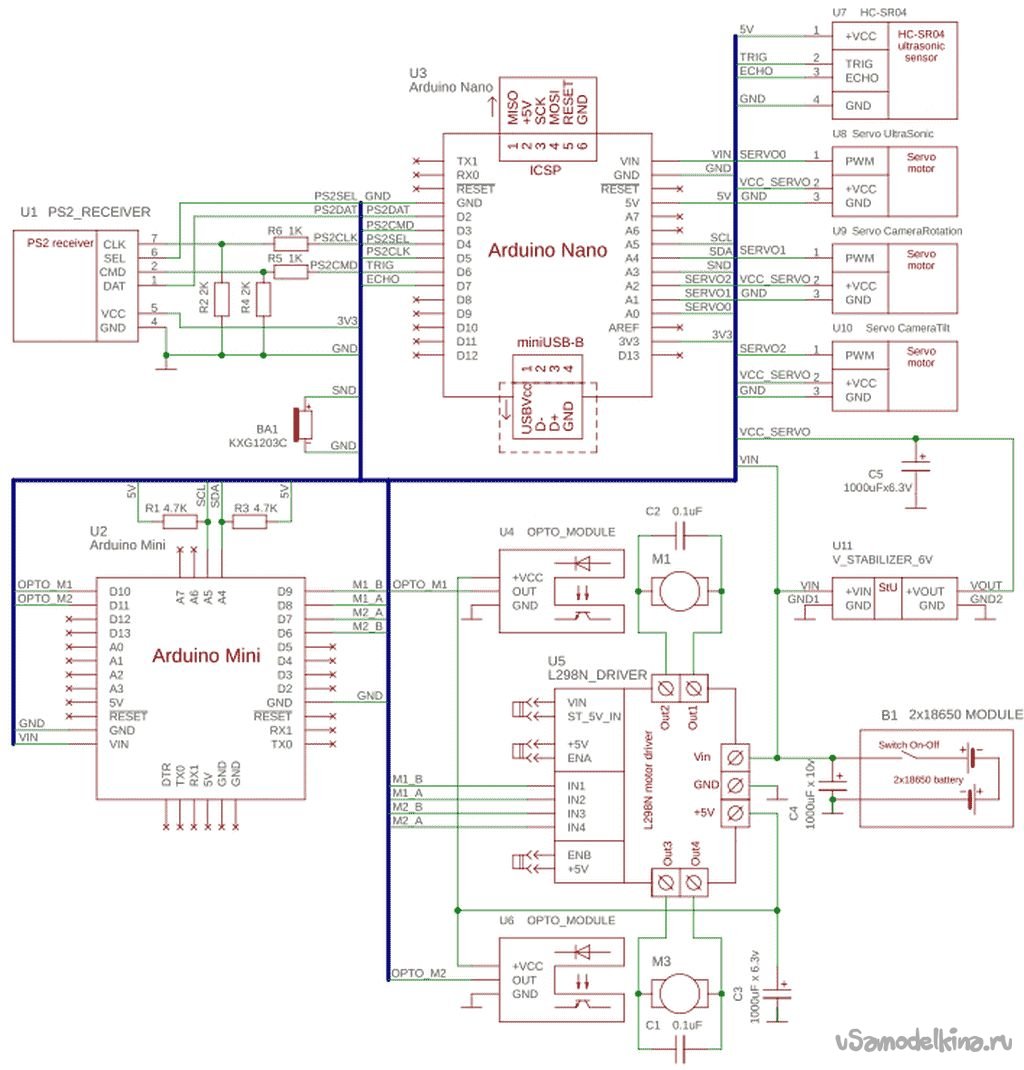
Управление машинкой осуществляется банально – по «танковой» схеме, изменением частоты и направления вращения двигателей гусениц посредством пульта от PS2.
В двигателях гусениц применена обратная связь через оптопары U4, U6 и дырчатые диски на валах. Понятное усложнение с лихвой окупается более стабильным управлением движками. Управление моторчиками осуществляется посредством ШИМ, для чего применен модуль U5 с микросхемой 2х-канального Н-ключа L298N и отдельный контроллер U2 “Arduino Mini”. Выделить отдельный контроллер для управления движками пришлось из-за того, что для обратной связи были задействованы аппаратные прерывания, что конфликтовало с библиотекой управления сервоприводами.
Основное управление реализовано на контроллере U3 “Arduino Nano”. Этот контроллер осуществляет связь с приемником от PS2 U1, управляет сервоприводами U8 – U10, реализует логику автоматического режима движения и через канал I2C управляет контроллером двигателей.
Сервоприводы U9 и U10 предназначены для управления положением камеры. О камере разговор пойдет позже, если камера не предполагается, эти сервы и стабилизатор U11 можно не устанавливать, а сервопривод УЗ-дальномера запитать от источника +5В платы драйвера L298N.
Резисторы R1 и R3 – подтяжка сигнальных линий I2C.
Резистивные делители R2, R6 и R4, R5 обязательны, если у вас приемник PS2 с питанием 3,3В, Если приемник с питанием 5В, делители не нужны, и все выводы приемника можно соединять с контроллером напрямую.
Прошивки для контроллеров приложены в сопутствующих файлах и, на мой взгляд, исчерпывающе прокомментированы, поэтому о программной части системы управления читать там.
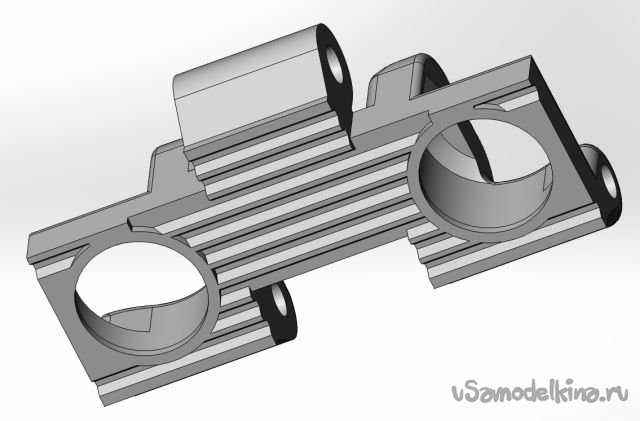
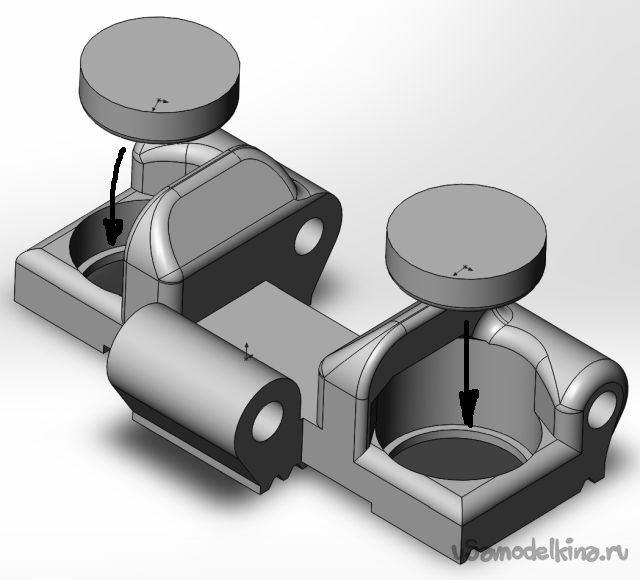
Камера.
Погоняв машинку в автоматическом и ручном режиме, захотелось оснастить ее камерой, для того чтобы иметь возможность управлять ею вне пределов прямой видимости, ну и просто по приколу. Камеру было решено сделать управляемой, с возможностью поворота в горизонтальной и вертикальной плоскости. Камера была применена купленная на Ali «широкоугольная FPV камера AKK TX04 PAL 5,8G 40CH 25MW VTX 700TVL 120°» вот такая:

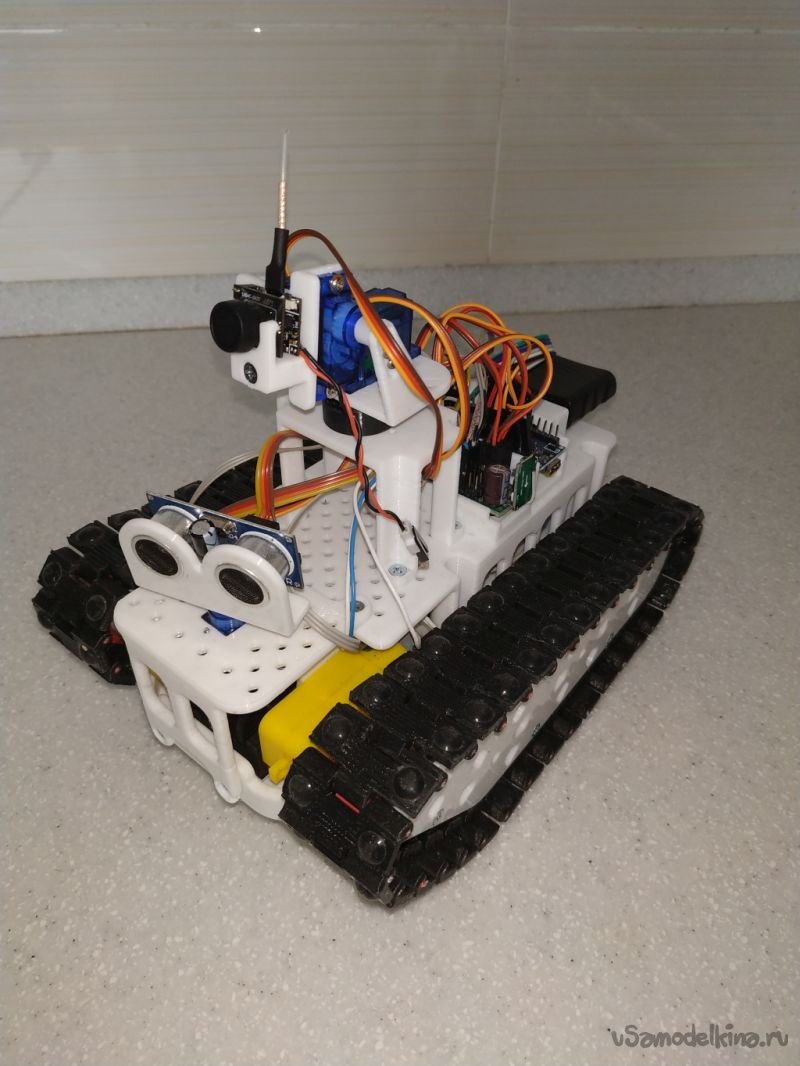
Конструкция получилась вот такая:
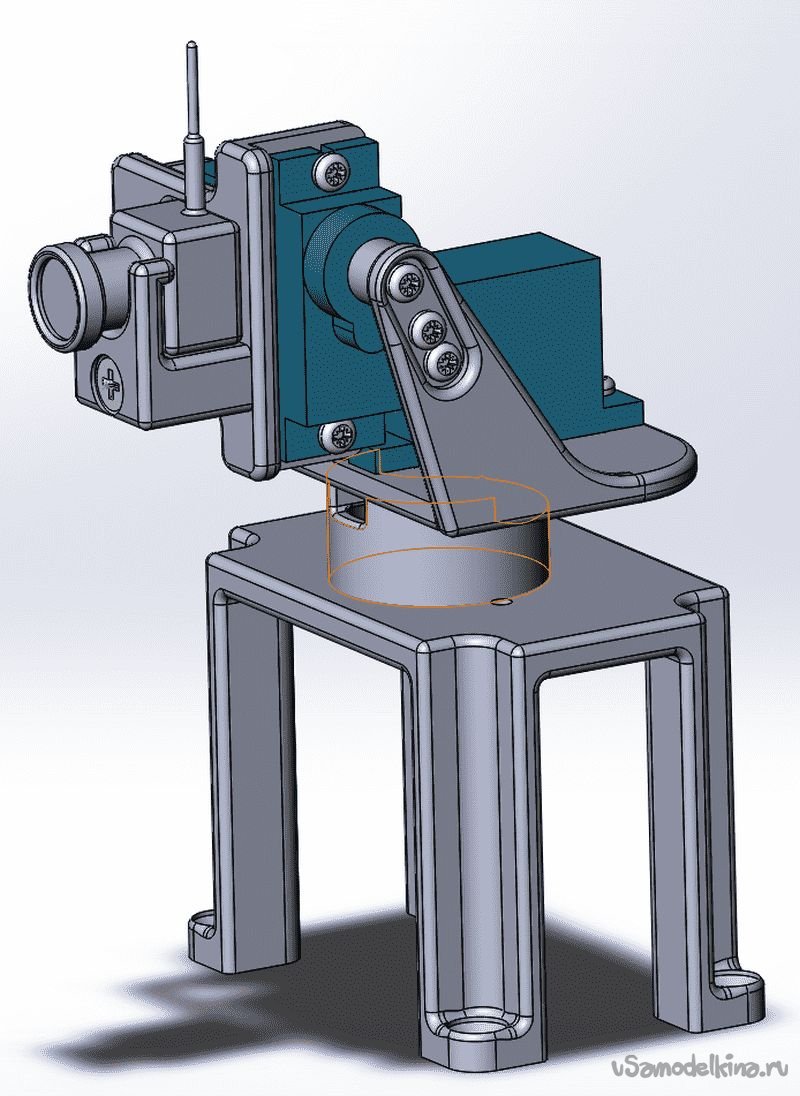
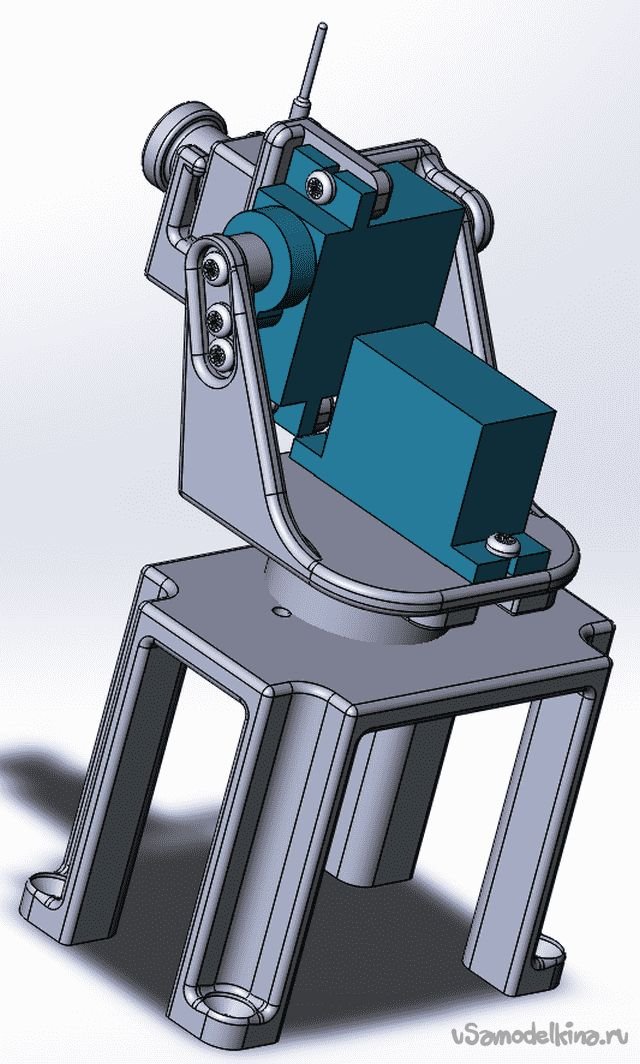
Ну и в натуре вот так:
Управление сервоприводами камеры выведено на кнопки кейпада (влево-вправо, вверх-вниз) джойстика PS2, кнопка “X” возвращает сервы в исходное положение. Как уже говорилось выше, сервоприводы U9 и U10 предназначены для управления положением камеры, U9 – отвечает за поворот, U10 – за наклон камеры.
Все детали напечатаны на принтере "Tronxy D01" из PLA пластика.
Все необходимые файлы можно скачать вот здесь: https://www.thingiverse.com/thing:5978860
Ну и видео:
[media=https://youtu.be/vxa0sA8vgJY]
Ну, вот на этом, собственно говоря, и все. Удачи!


