
Здоровья и удачи вам, решившим потратить время на прочтение этого текста!
Представляемая модель являет собой реализацию разновидности всенаправленного колесного движителя, придуманной советским изобретателем Олегом Алексеевичем Кашаровым в 1978 году. В 1982 году об этом изобретении была опубликована статья в июльском номере журнала «Техника молодежи». Возможно, были еще какие-нибудь публикации, но мне они неизвестны.
Основным элементом движителя Кашарова, или, как он называл его, «шарохода» является колесная пара (рис 1), состоящая из двух колес, представляющих собой усеченные с двух сторон сферы. Колеса свободно вращаются на своих осях и закреплены на вращающейся раме так, что их оси взаимно перпендикулярны. Ось вращения рамы, в свою очередь, перпендикулярна осям вращения обоих колес.
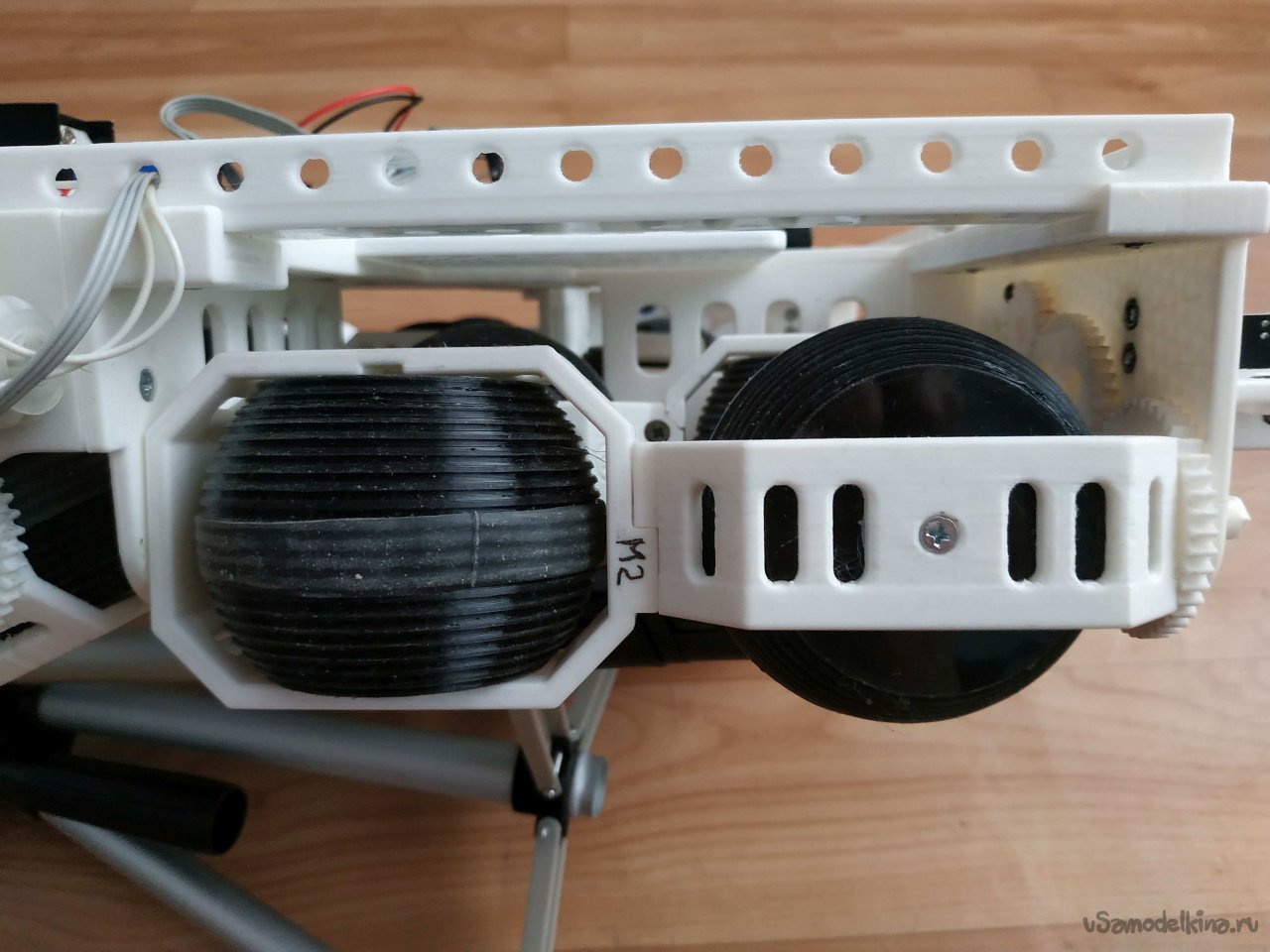
Рис 1
Если смотреть вдоль направления оси рамы, колеса дополняют друг друга до полной окружности и, при вращении рамы, катятся по поверхности как одно целое колесо. Соответственно, если к оси рамы приложить вращающий момент, такое «колесо» будет ведущим, и будет осуществлять движение в направлении поперечном оси рамы. При движении в направлении совпадающем с осью вращения рамы, колеса свободно вращаются, и, засчет сферической формы, не зависимо от угла, в каком находится или даже вращается рама, не препятствуют движению.
Колесные пары собраны в четыре группы по две (рис 2), где через зубчатые передачи на них подается вращающий момент от мотор-редукторов. В группе колесные пары установлены так, что оси их колес попарно перпендикулярны.
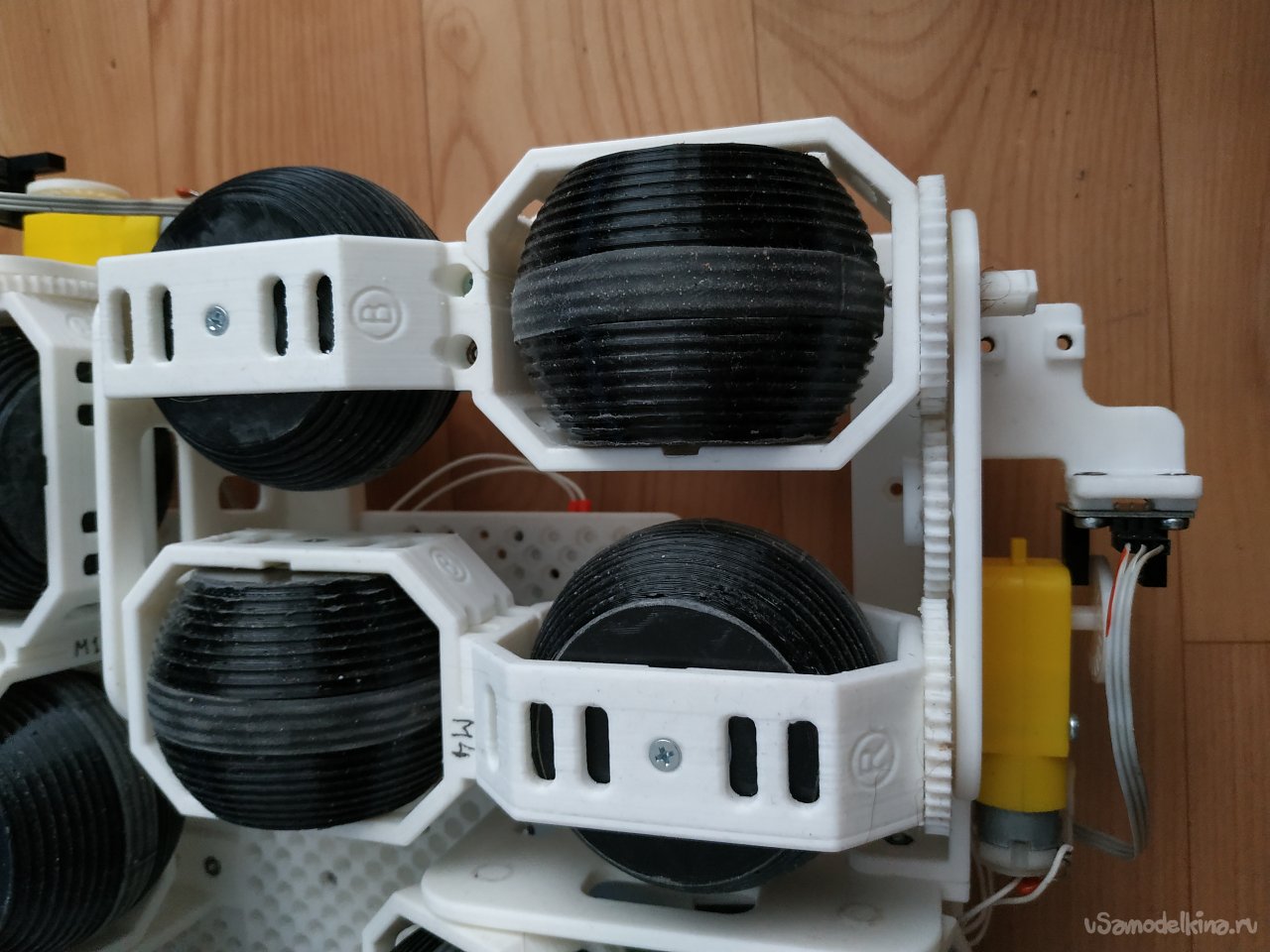
Рис 2
Двигатели мотор-редукторов управляются посредством ШИМ и охвачены обратной связью через оптические датчики вращения (сегментированный диск на оси редуктора и оптопара).
В собранном виде модель показана на рис. 3 вид снизу:
Рис 3
И на рис. 4 вид сверху:
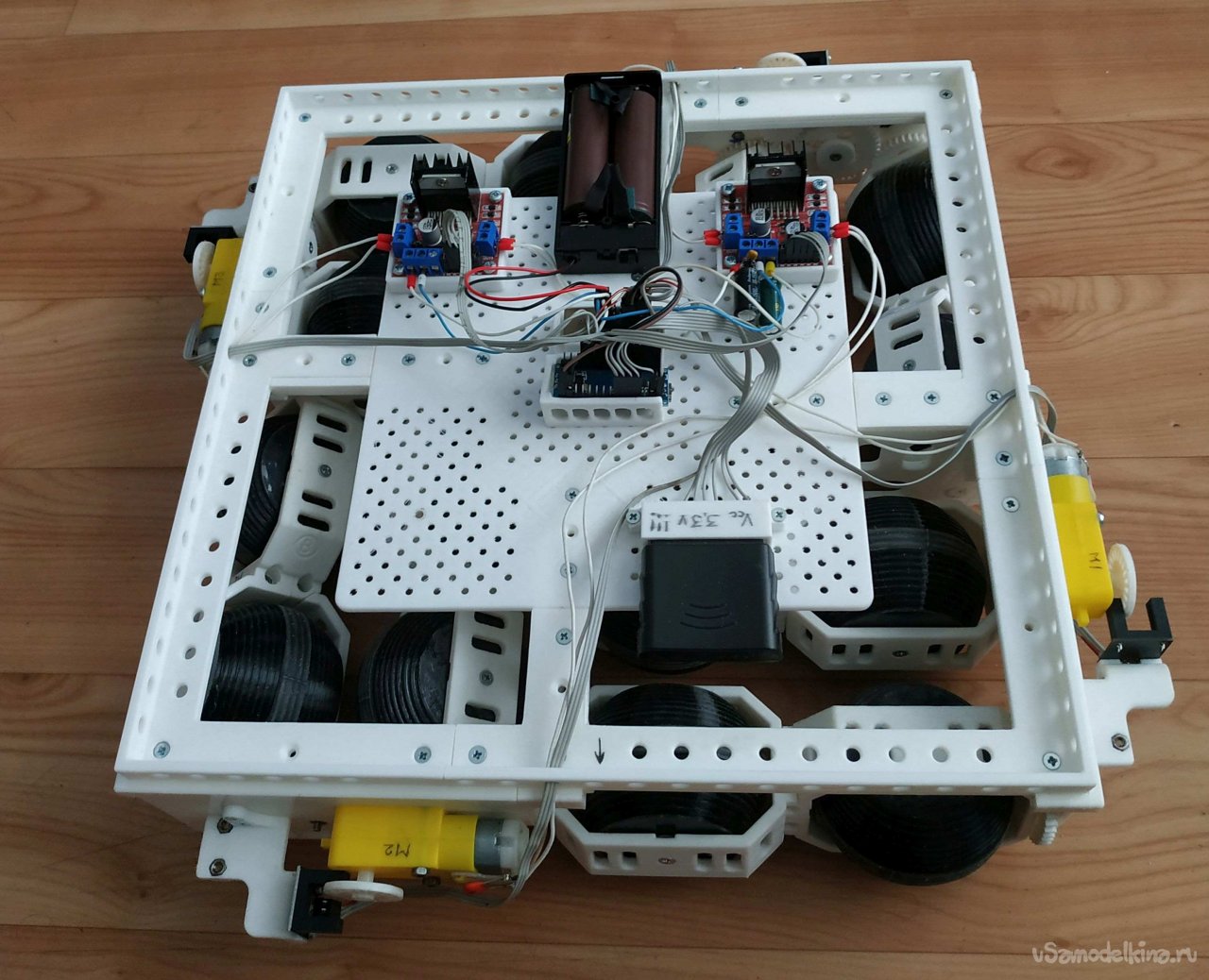
Рис 4
Управление моделью реализовано на контроллере «Arduino Nano» и беспроводном джойстике от Sony PS2, силовая часть на двух 2х-канальных Н-ключах на микросхемах L298N. Питание – два аккумулятора 18650. Для питания оптопар используется стабилизатор +5в на одной из плат ключей. Для питания приемника джойстика +3,3в с платы контроллера.
Все детали конструкции распечатаны на 3d-принтере “Tronxy D01” из пластика PLA, колеса из TPU.
Все необходимые файлы (модели, схема, прошивка и т.д.) можно скачать здесь: https://www.thingiverse.com/thing:5600117
Управление моделью осуществляется следующим образом:
Двигатели групп колесных пар попарно подключены к двум аналоговым джойстикам беспроводного пульта от Sony PS2. На Рис. 4 в нижней части рисунка на корпусе видна маленькая стрелка – это условное направление «вперед». Моторы групп колес, оси рам которых поперечны этому направлению, подключены к правому джойстику, продольны - к левому. Соответственно правый джойстик отвечает за движение «вперед-назад», левый «вправо-влево». Программа контроллера построена так, что при отклонении джойстиков вверх рамы колес вращаются однонаправленно в одном направлении, при отклонении вниз рамы колес вращаются однонаправленно в обратном направлении и мы имеем прямолинейное движение в соответствующем направлении. При отклонении джойстиков влево рамы колес вращаются разнонаправленно в одном направлении, при отклонении вправо рамы колес вращаются разнонаправленно в обратном направлении и мы имеем разворот в соответствующем направлении. Комбинацией промежуточных положений джойстиков можно заставить двигаться модель самым различным образом. Видео: https://drive.google.com/file/d/1yORXhTp3tZxDvD3fHYiAZdku06VtVwOU/view?usp=share_link


