
Здоровья и удачи вам, решившим потратить время на прочтение этого текста!
Выкладывал я тут как-то на thingiverse.com самоходную гусеничную платформу с дистанционным управлением. Вот такую https://www.thingiverse.com/thing:5978860:
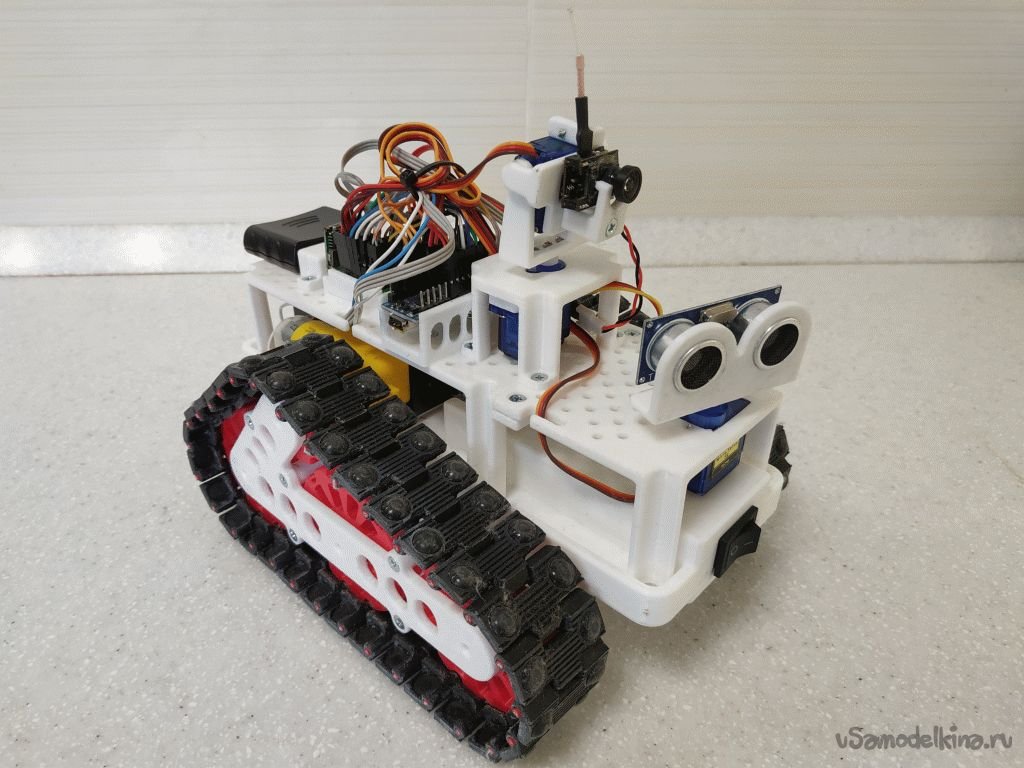
А вот теперь то же самое, но с дельта-гусеницей а-ля бульдозер «Caterpillar»:
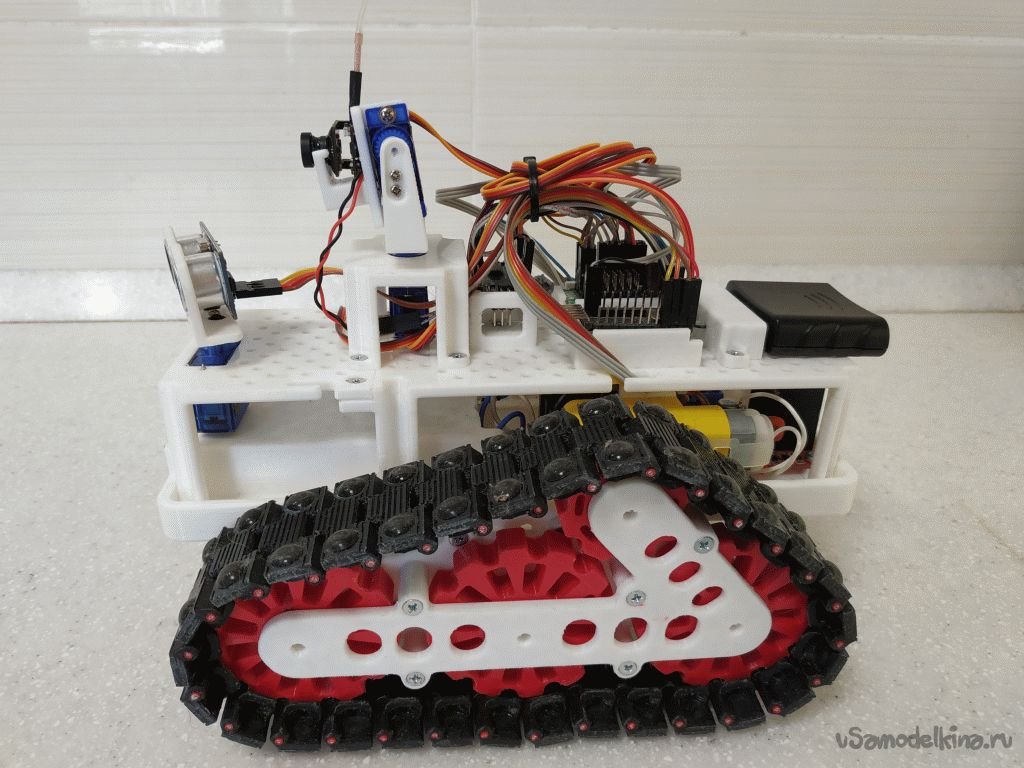
Гусеницы.
Конструкция траков гусениц точно такая же, как у первой модели, в приложенных файлах к которой все подробно описано. Общее число траков 30 штук на гусеницу. Каждая гусеница приводится в действие своим мотор-редуктором ТТ.
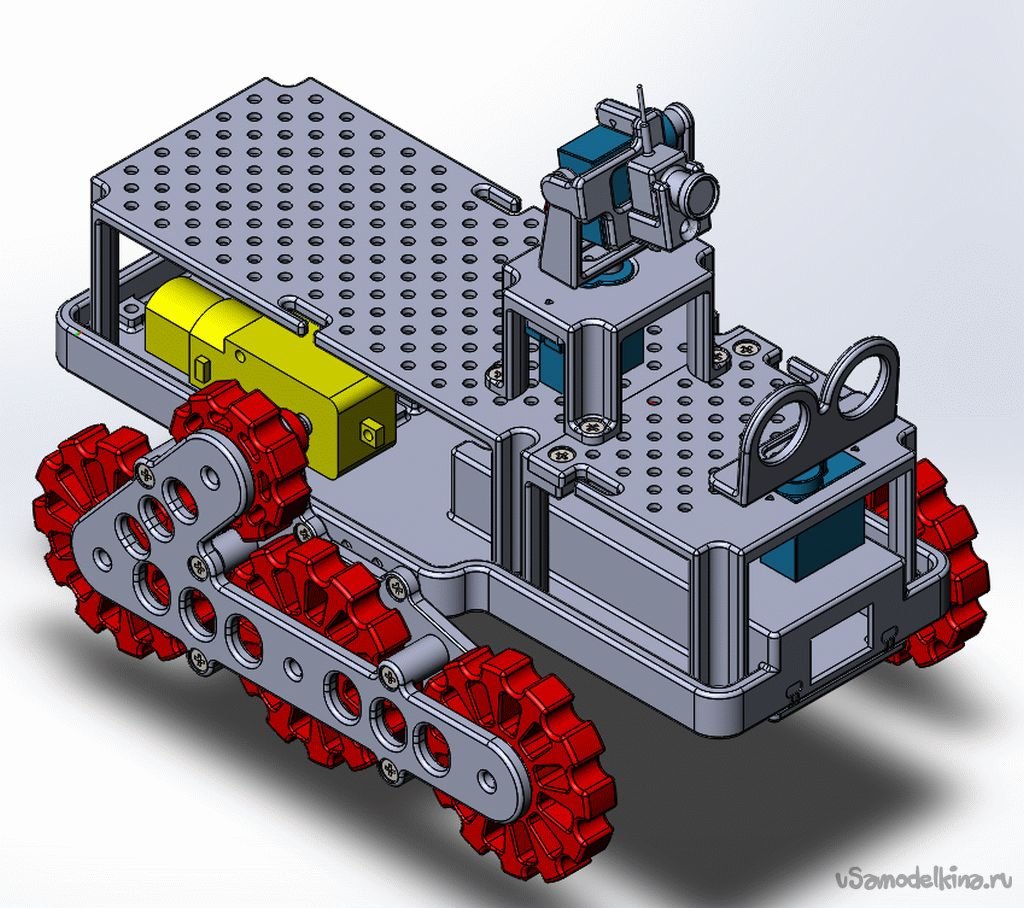
Общая конструкция
По общей конструкции все понятно из приведенных рисунков.
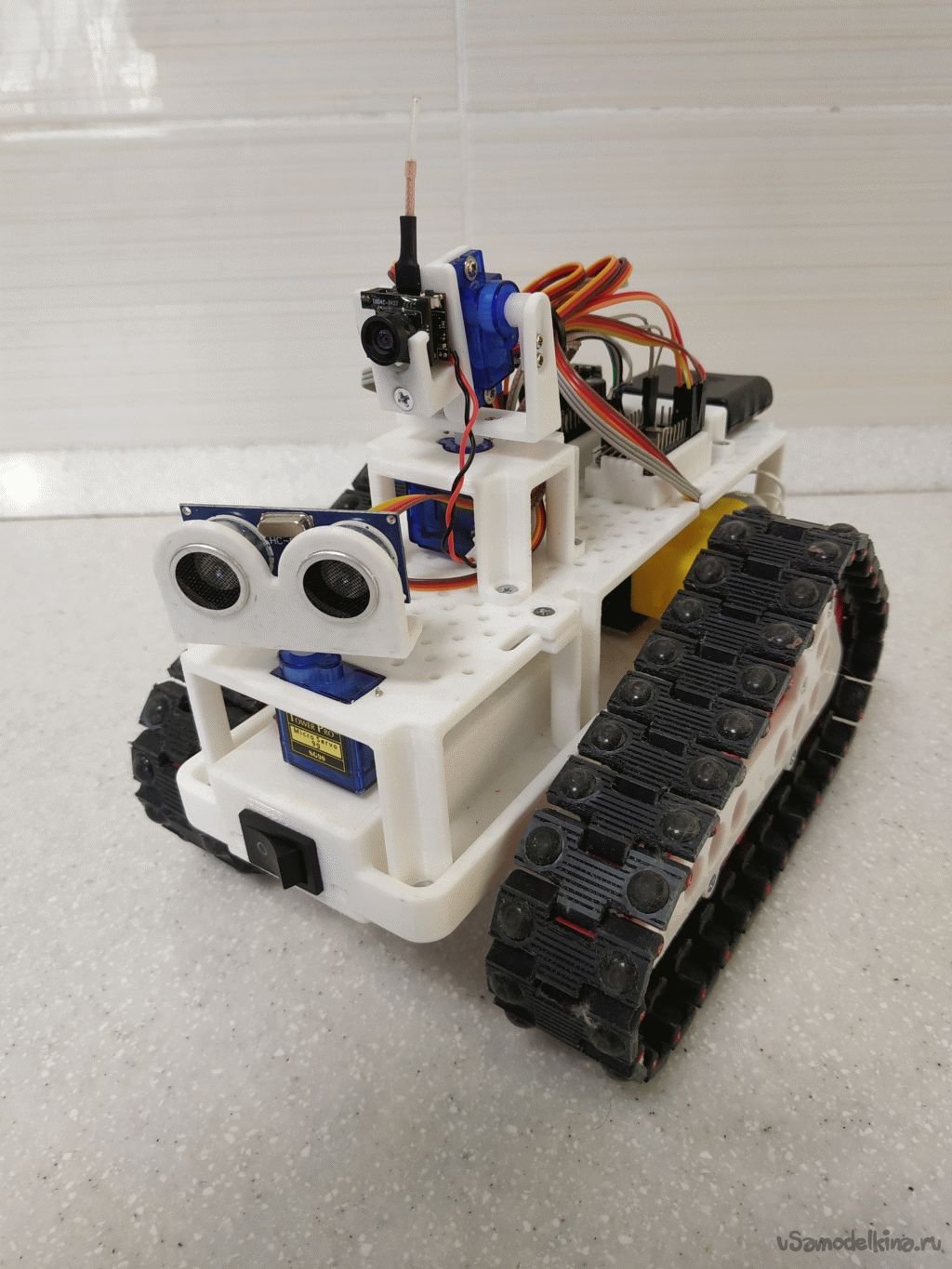
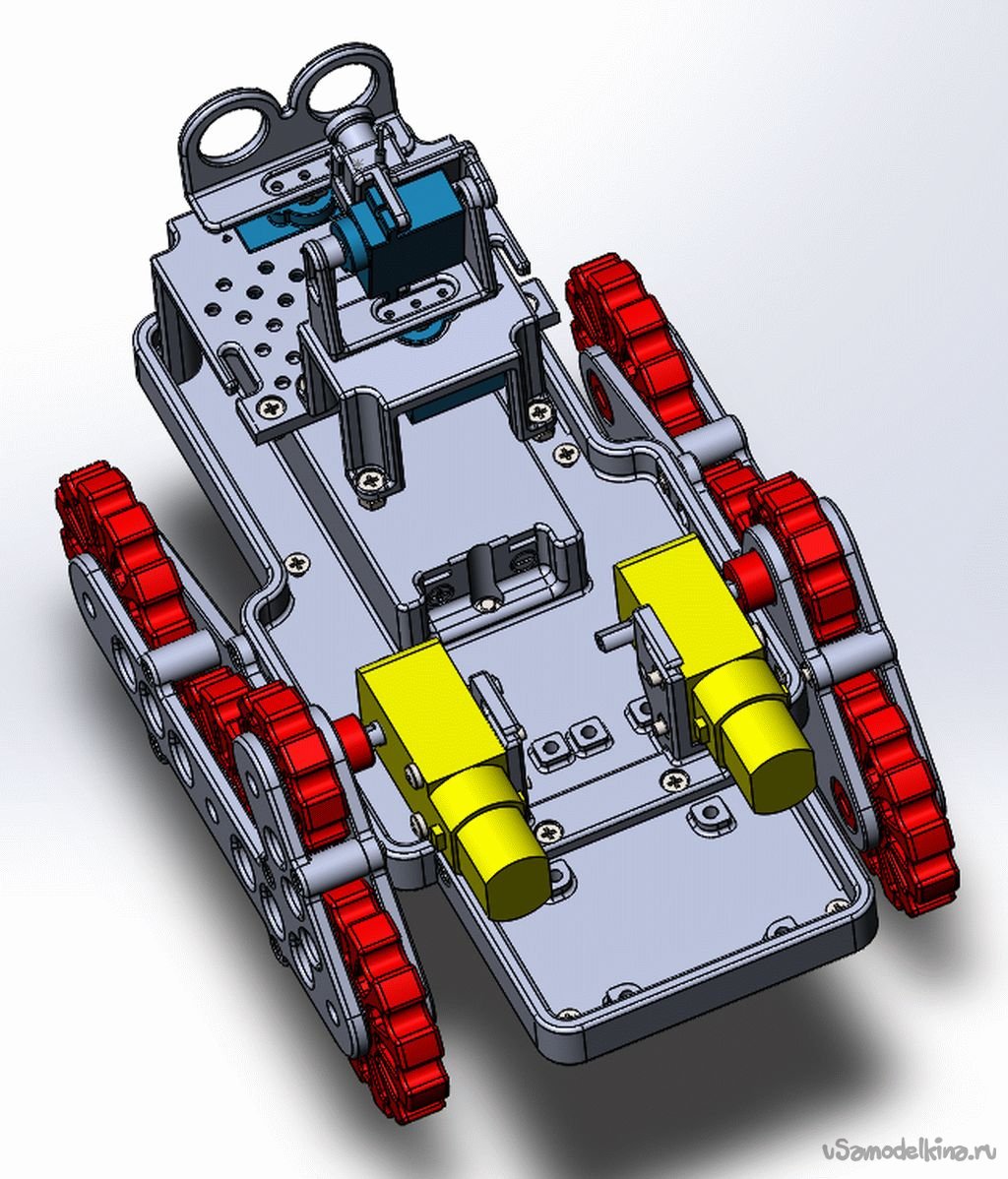
Общий вид:
Общий вид со снятой крышкой:
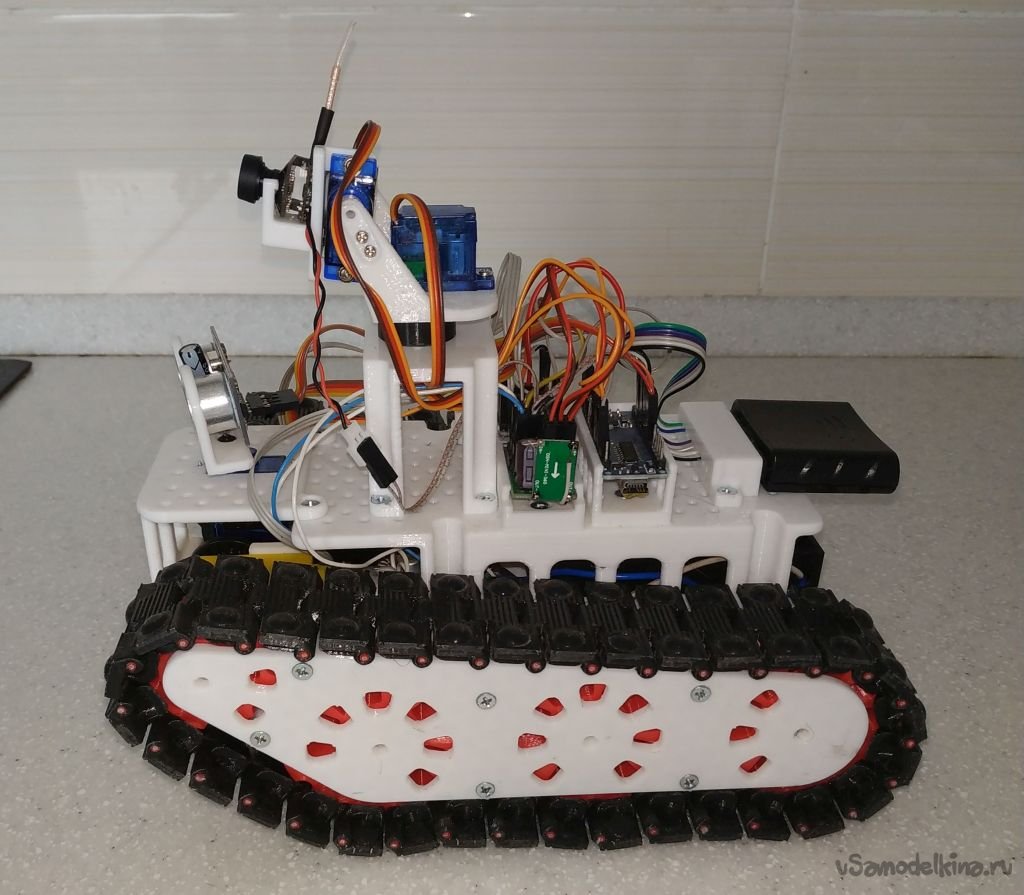
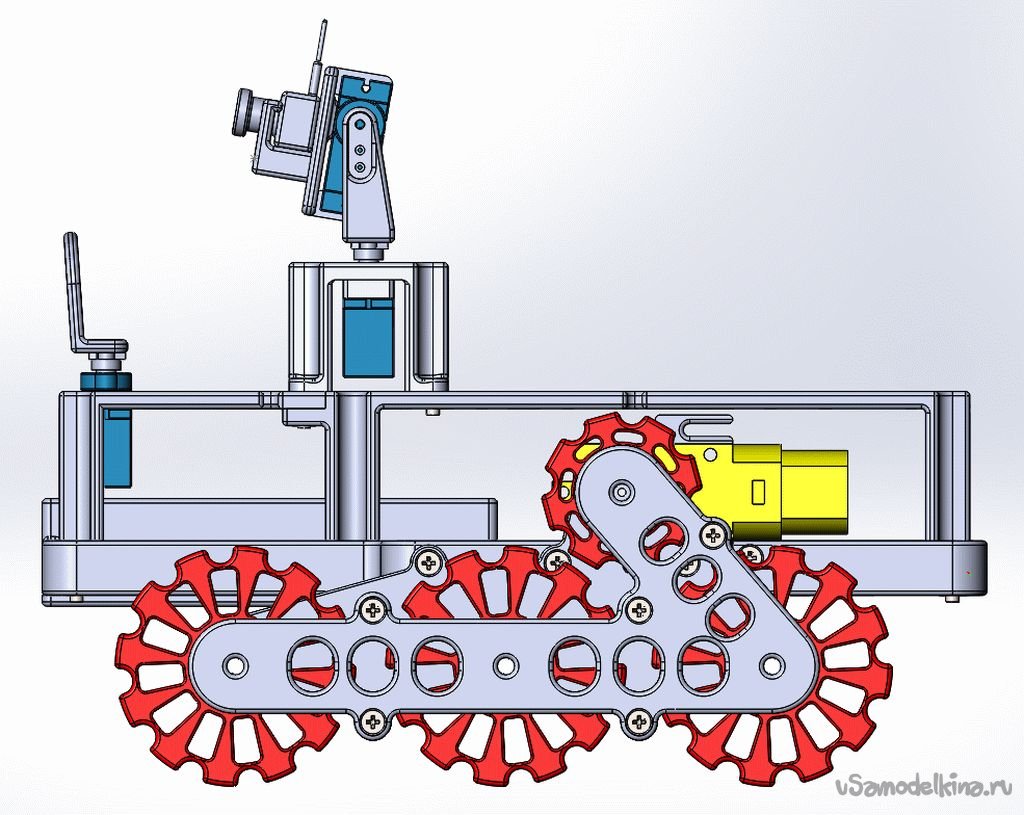
Вид слева:
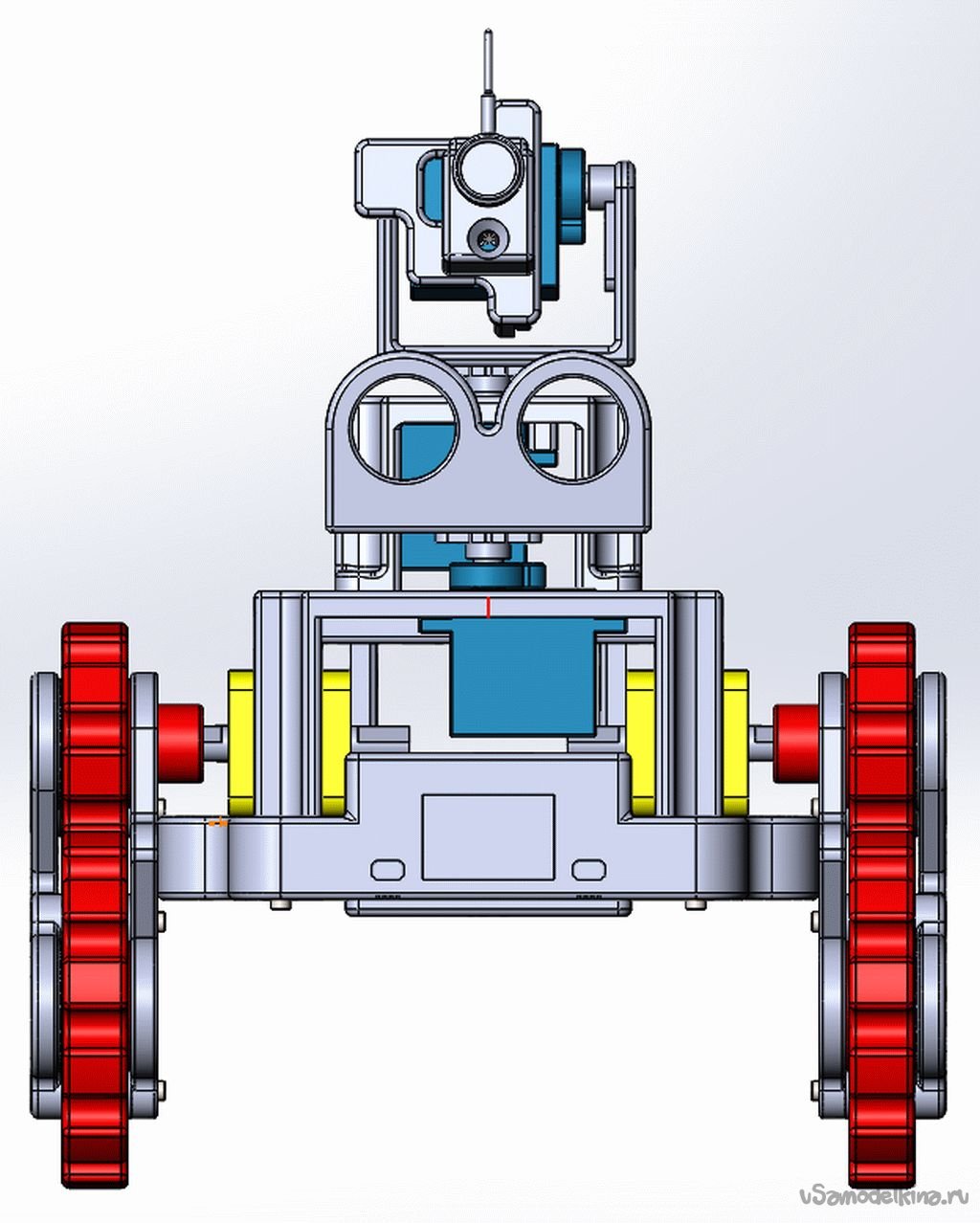
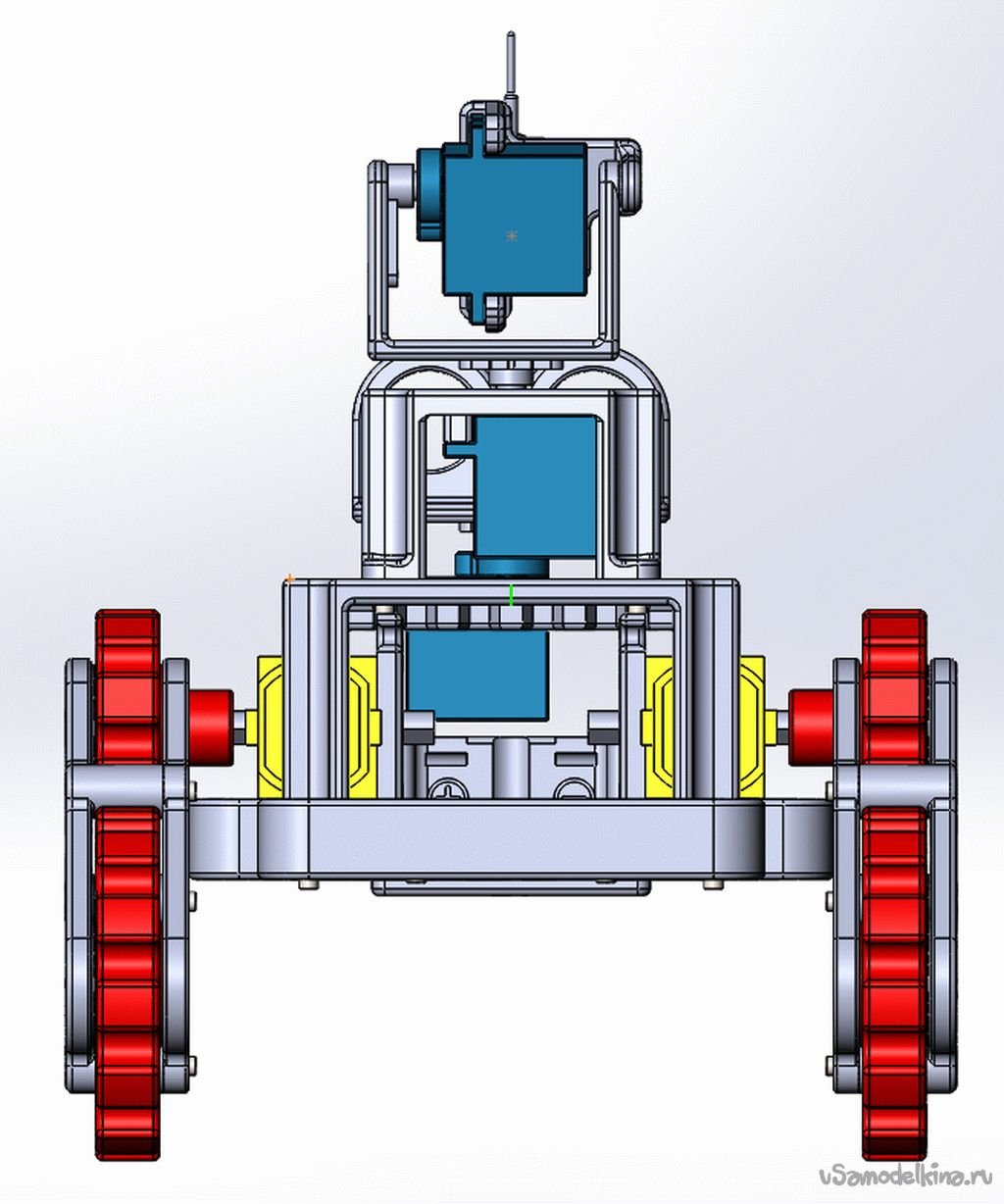
Вид спереди и сзади:
Вид сверху:
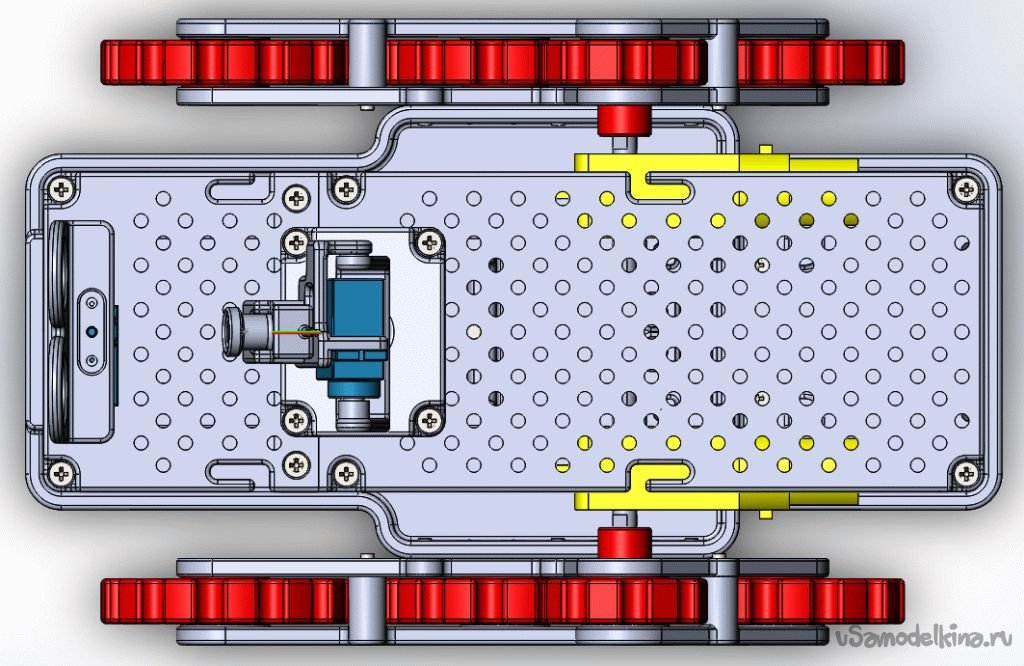
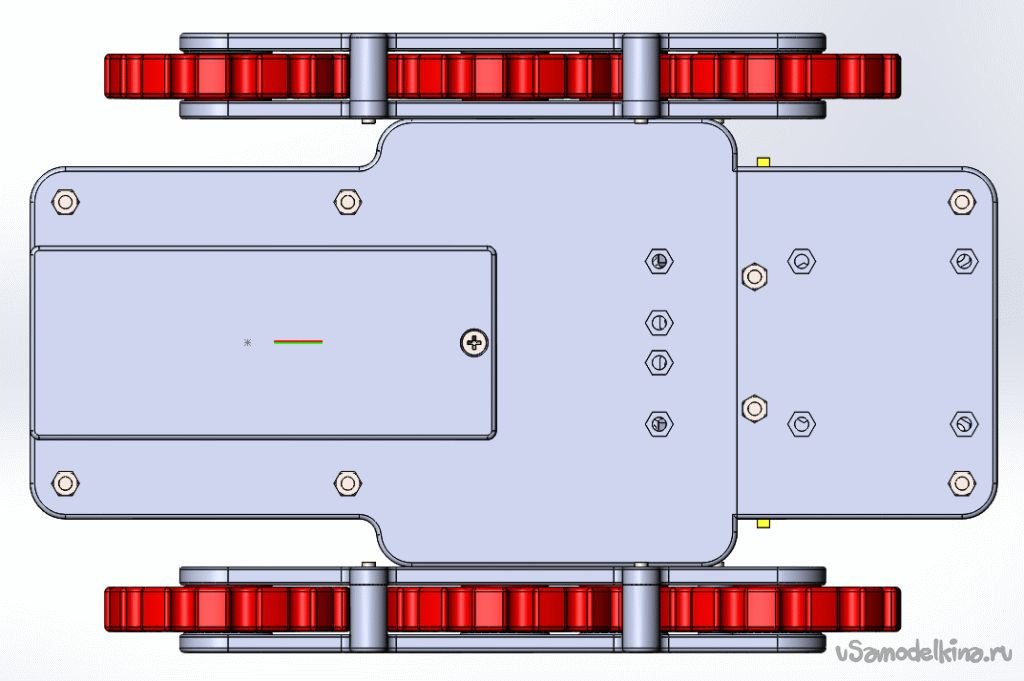
Вид снизу:
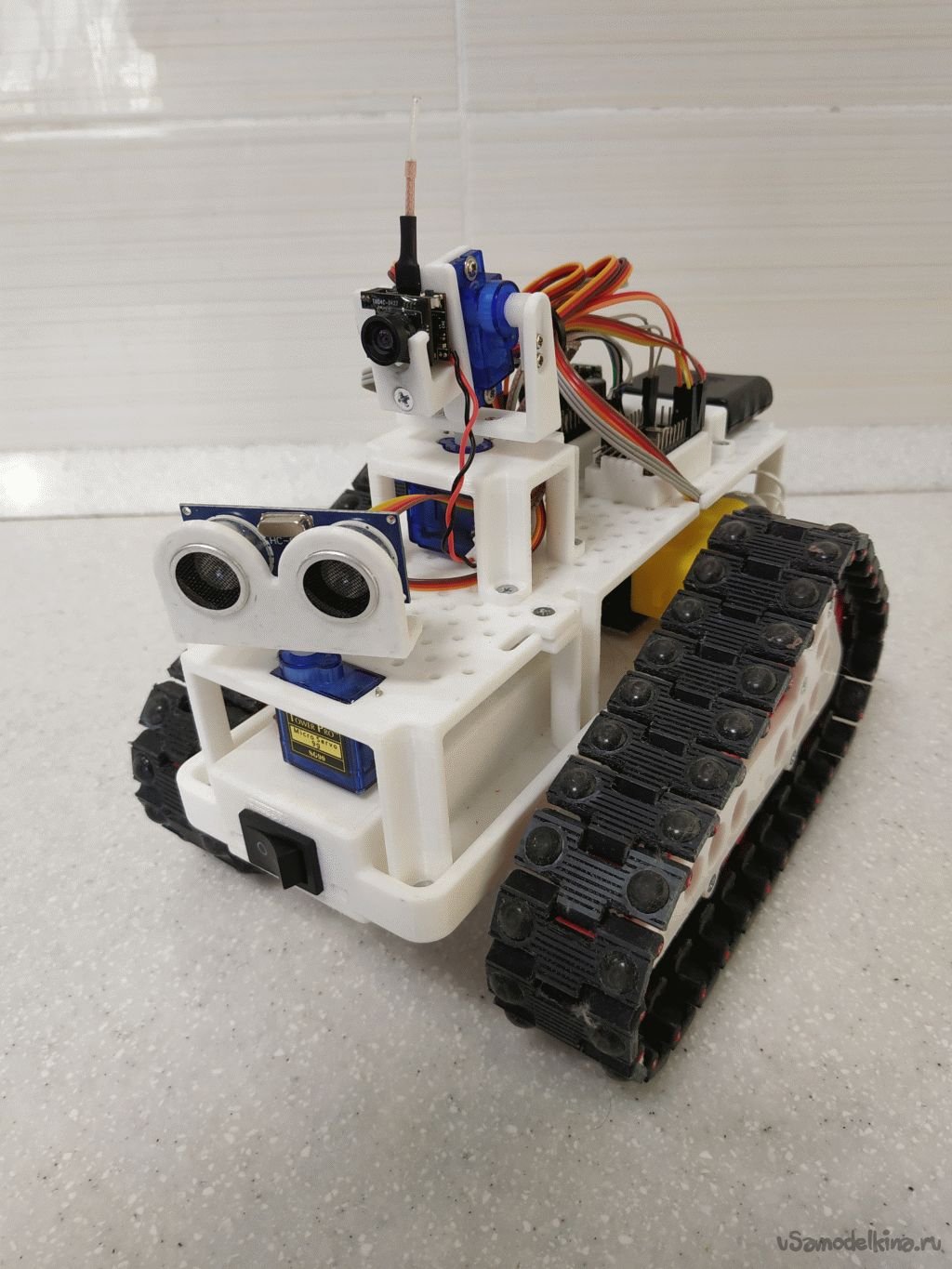
Так же, как и у первой модели, в передней части корпуса находится сервопривод, на оси которого закреплен кронштейн с УЗ-дальномером HC-04.
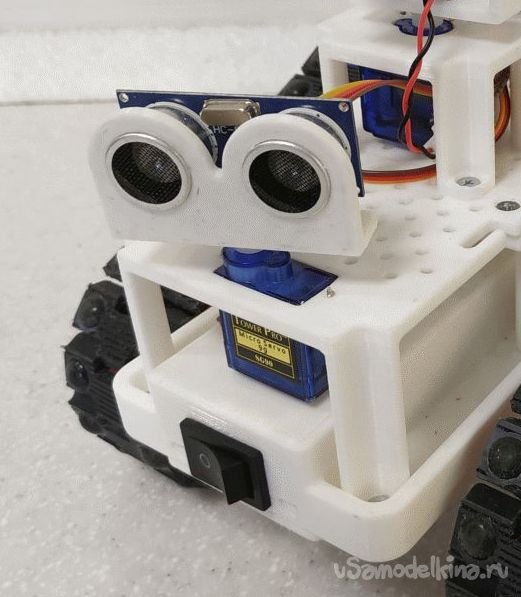
Предполагается, что во время движения в автоматическом режиме, дальномер поворачивается туда-сюда в пределах угла ≈120° для обнаружения препятствий.
Система управления.
Управление машинкой осуществляется банально – по «танковой» схеме, изменением частоты и направления вращения двигателей гусениц посредством пульта от PS2.
Схема и система управления, прошивки для контроллеров в точности такие же, как у первой модели, в приложенных файлах к которой все подробно описано.
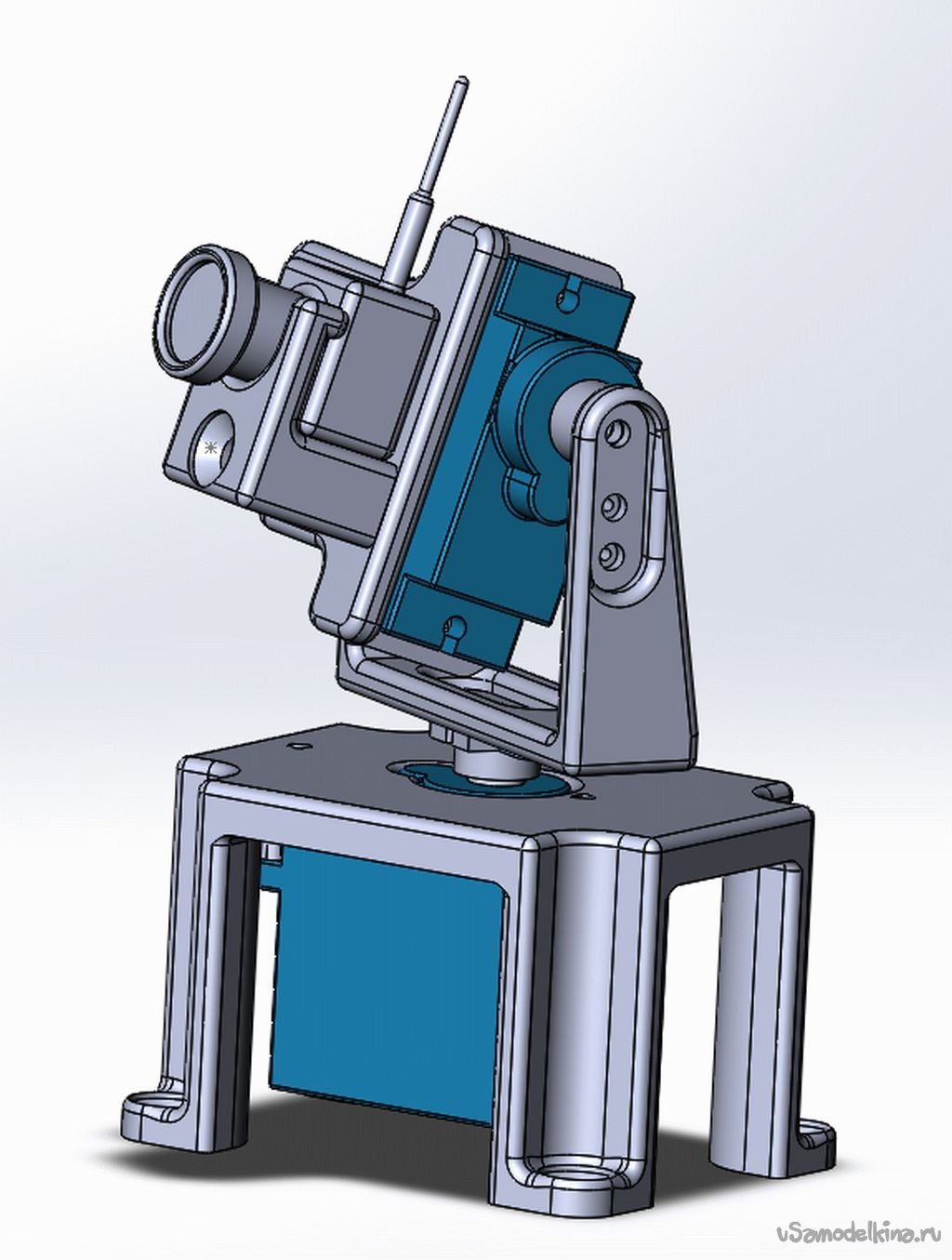
Камера.
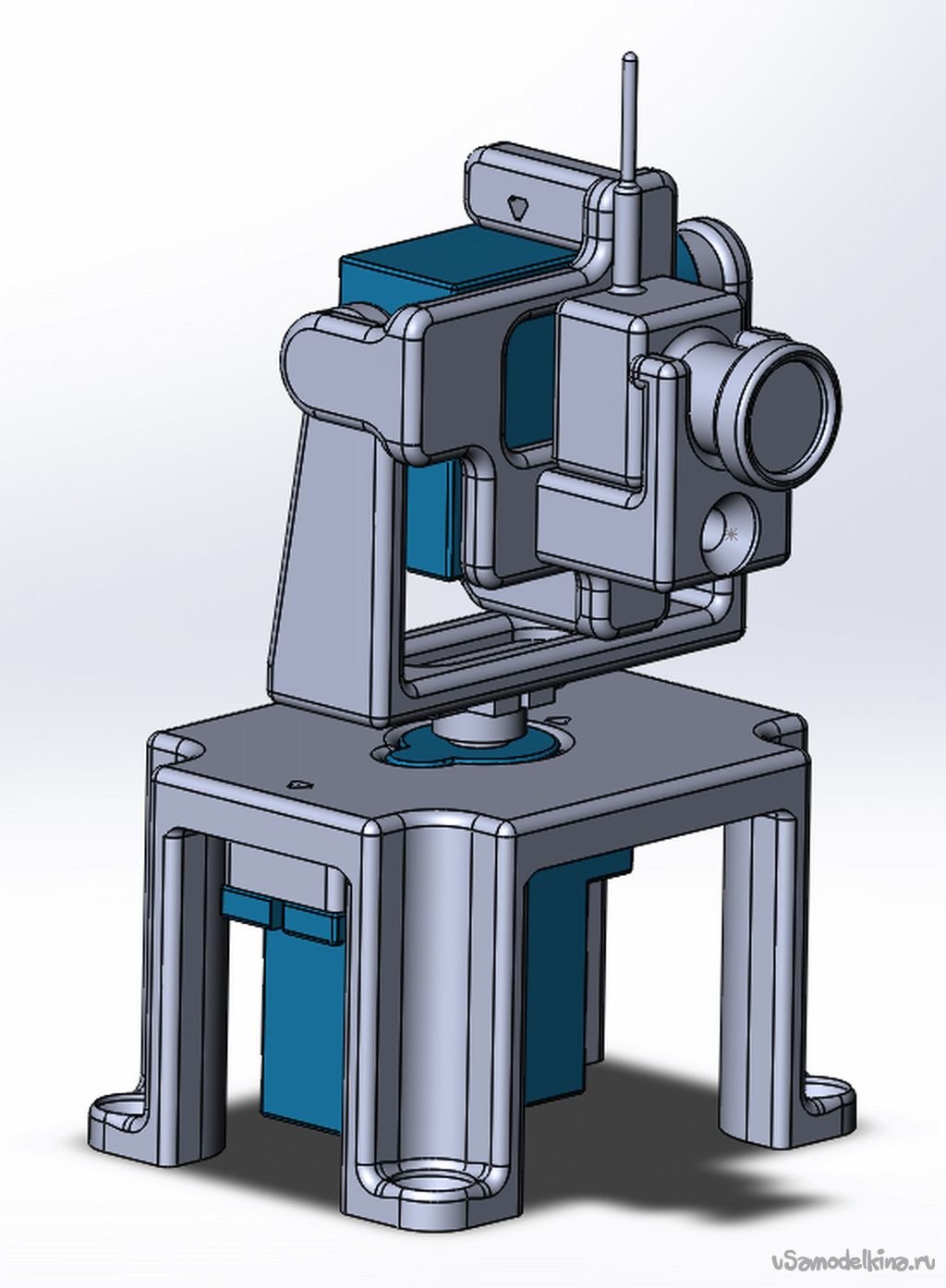
Камера была применена купленная на Ali «широкоугольная FPV камера AKK TX04 PAL 5,8G 40CH 25MW VTX 700TVL 120°» вот такая:

Камера имеет возможность поворота в горизонтальной и вертикальной плоскости. Конструкция держателя камеры получилась вот такая:
Ну и в натуре вот так:
Управление сервоприводами камеры выведено на кнопки кейпада (влево-вправо, вверх-вниз) джойстика PS2, кнопка “X” возвращает сервы в исходное положение.
Все детали напечатаны на принтере "Tronxy D01" из PLA пластика.
Все необходимые файлы можно скачать вот здесь: https://www.thingiverse.com/thing:6088938
Ну и видео:
[media=https://youtu.be/yMNV9_EhkpY]
[media=https://youtu.be/MpJosSFIasY]
[media=https://youtu.be/jM9vyhU6JHE]
Ну, вот на этом, собственно говоря, и все. Удачи!


