Здоровья и удачи Вам, решившим потратить время на прочтение этого текста!
Поигравшись с моделями на сборных гусеницах (из отдельных жестких траков), захотелось мне все-таки вернуться к идее цельно-напечатанной гусеницы. Так как номер с жесткими траками при таком раскладе у меня не прошел (прочность межтраковых соединений получается никакая), - решил я обратиться к идее гусениц из эластичного материала. Тут тоже оказалось не все так просто. Так как гибкую гусеницу надо хоть немного натягивать, ходовая часть на парах скольжения «вал-отверстие» получилась с очень большим трением и два китайских мотор-редуктора ТТ (желтые) ее еле двигали. Пришлось сделать ходовую часть на шариковых подшипниках. В конечном счете, получилось вот такое:

Гусеницы.
Итак, начнем с вешалки, пардон, с гусениц. Наши гусеницы напечатаны из черного TPU-пластика имеют такой вид:
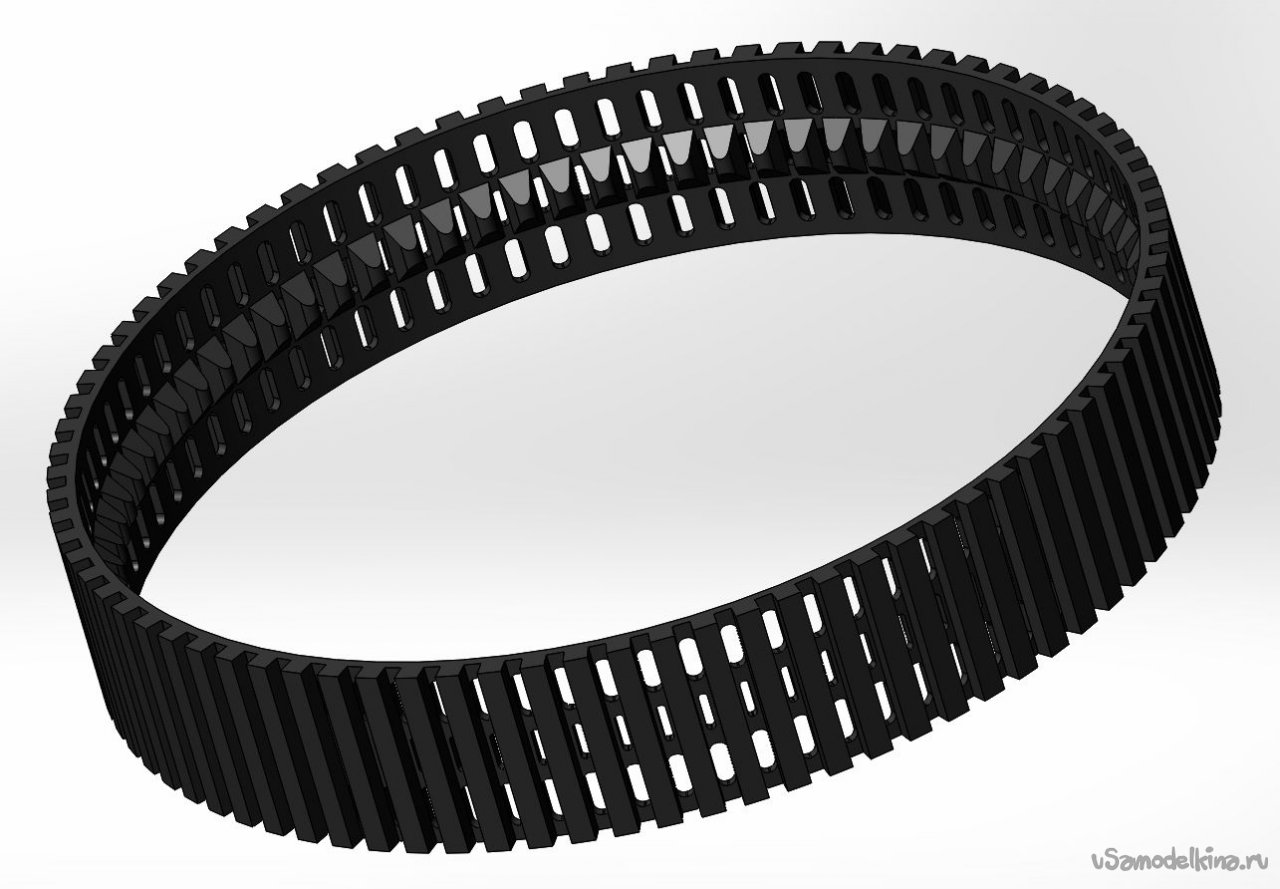
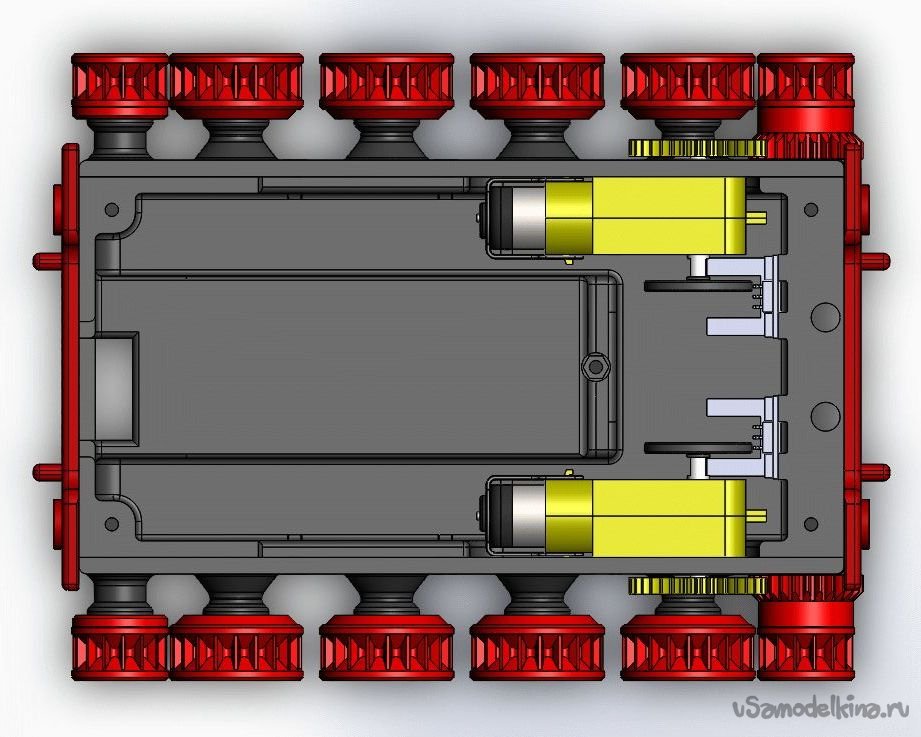
Общее число траков - 81 на гусеницу. Каждая гусеница приводится в действие своим мотор-редуктором ТТ.
Общая конструкция
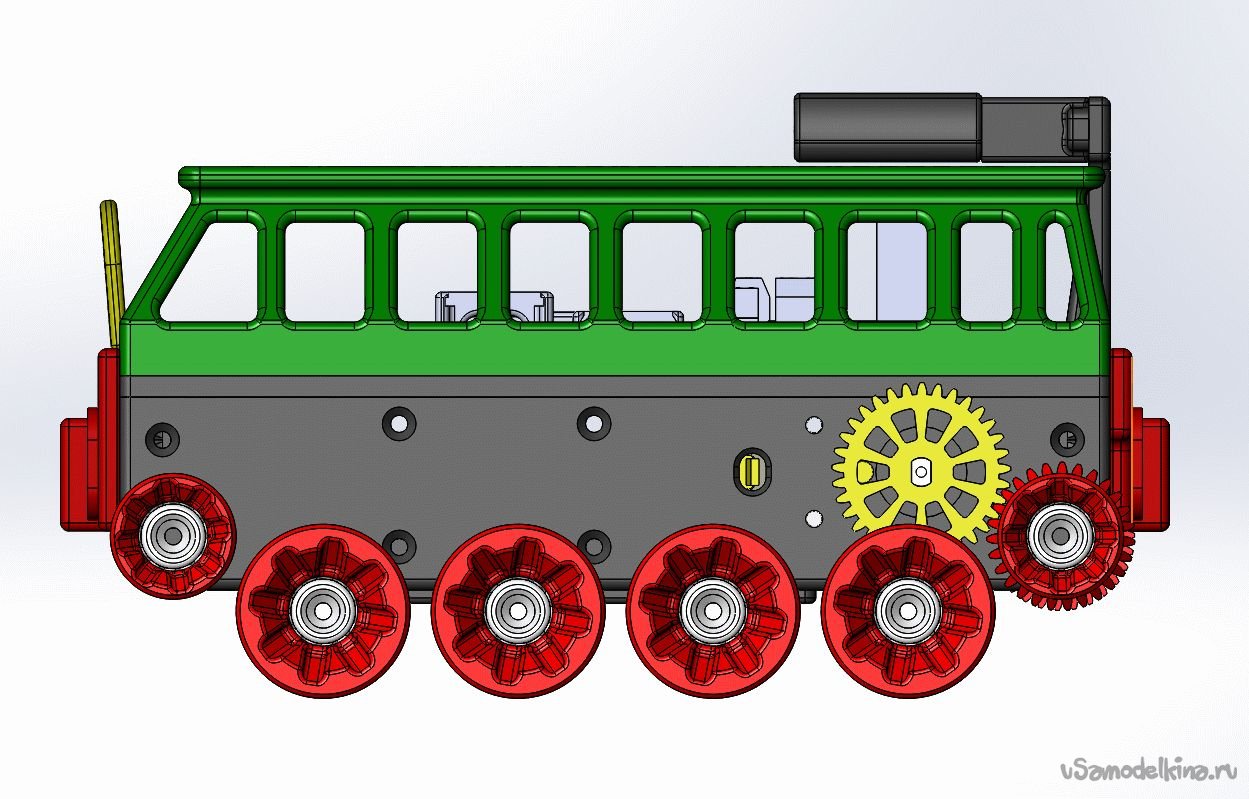
Вид слева:
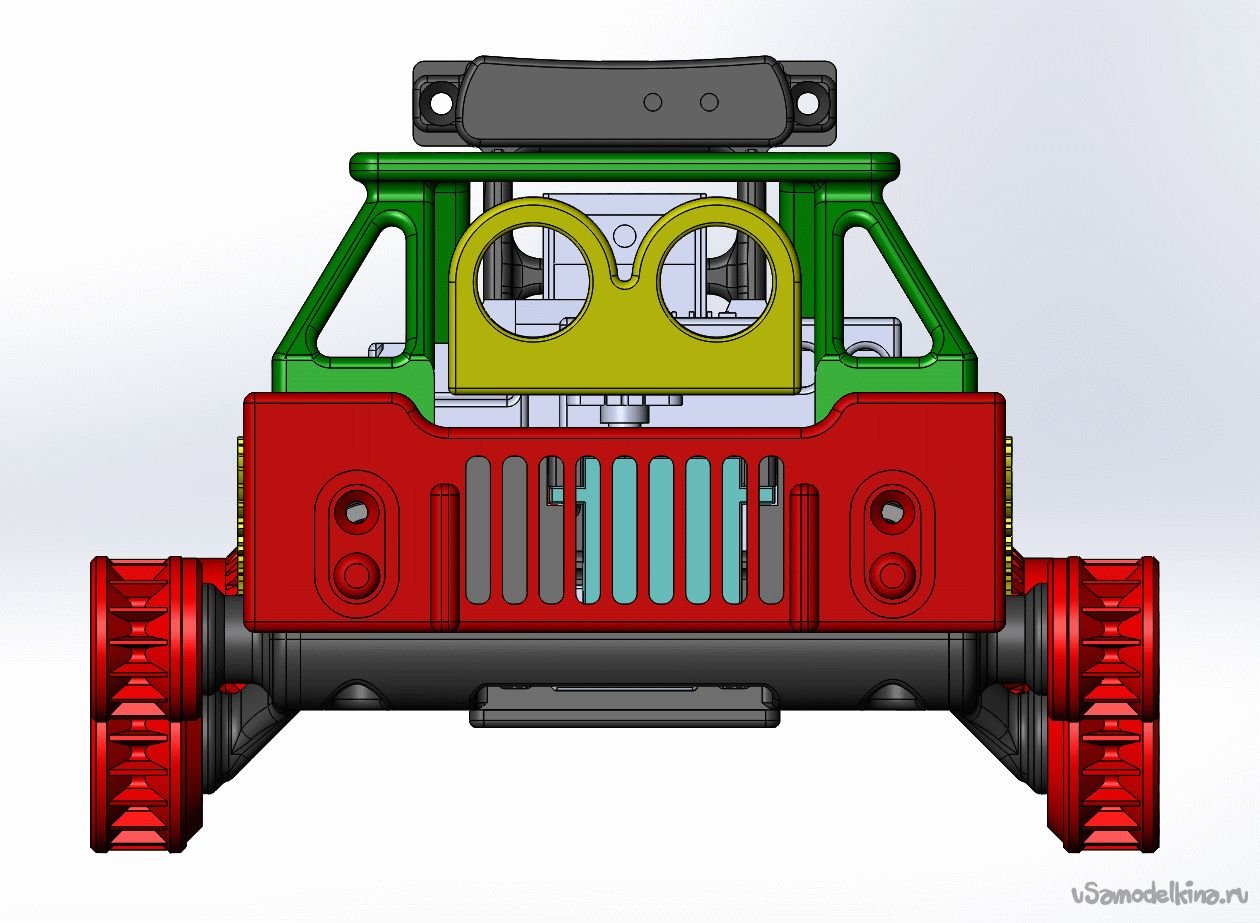
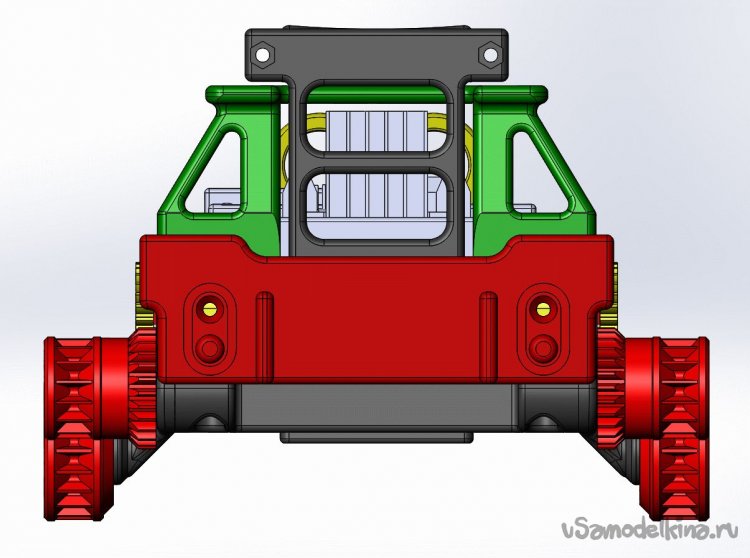
Вид спереди и сзади:
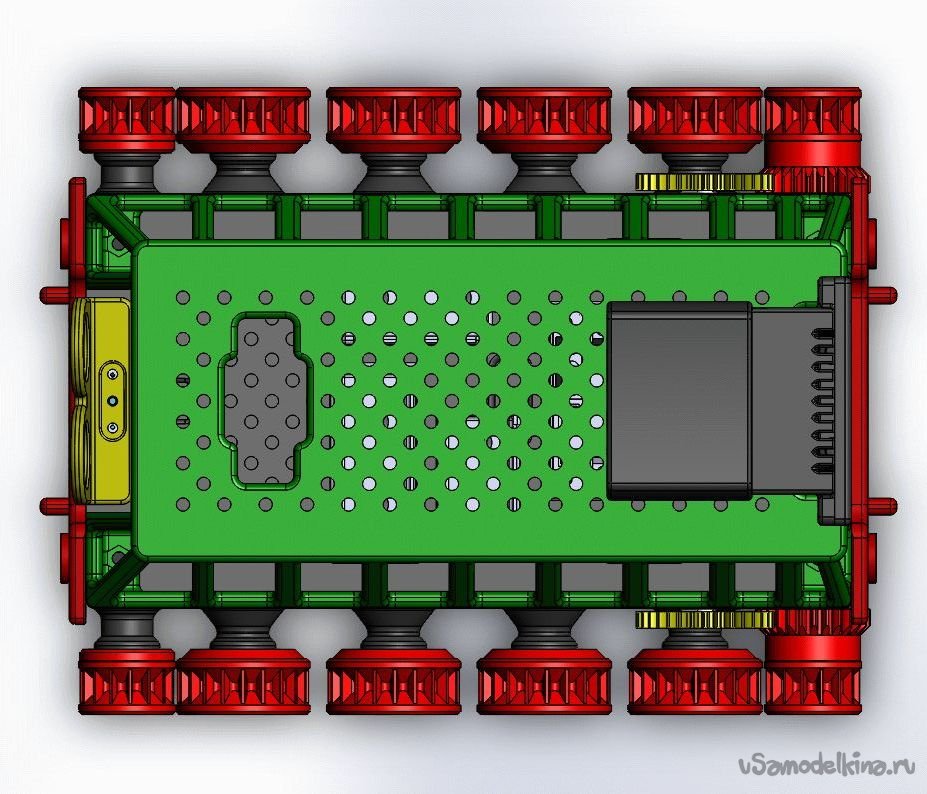
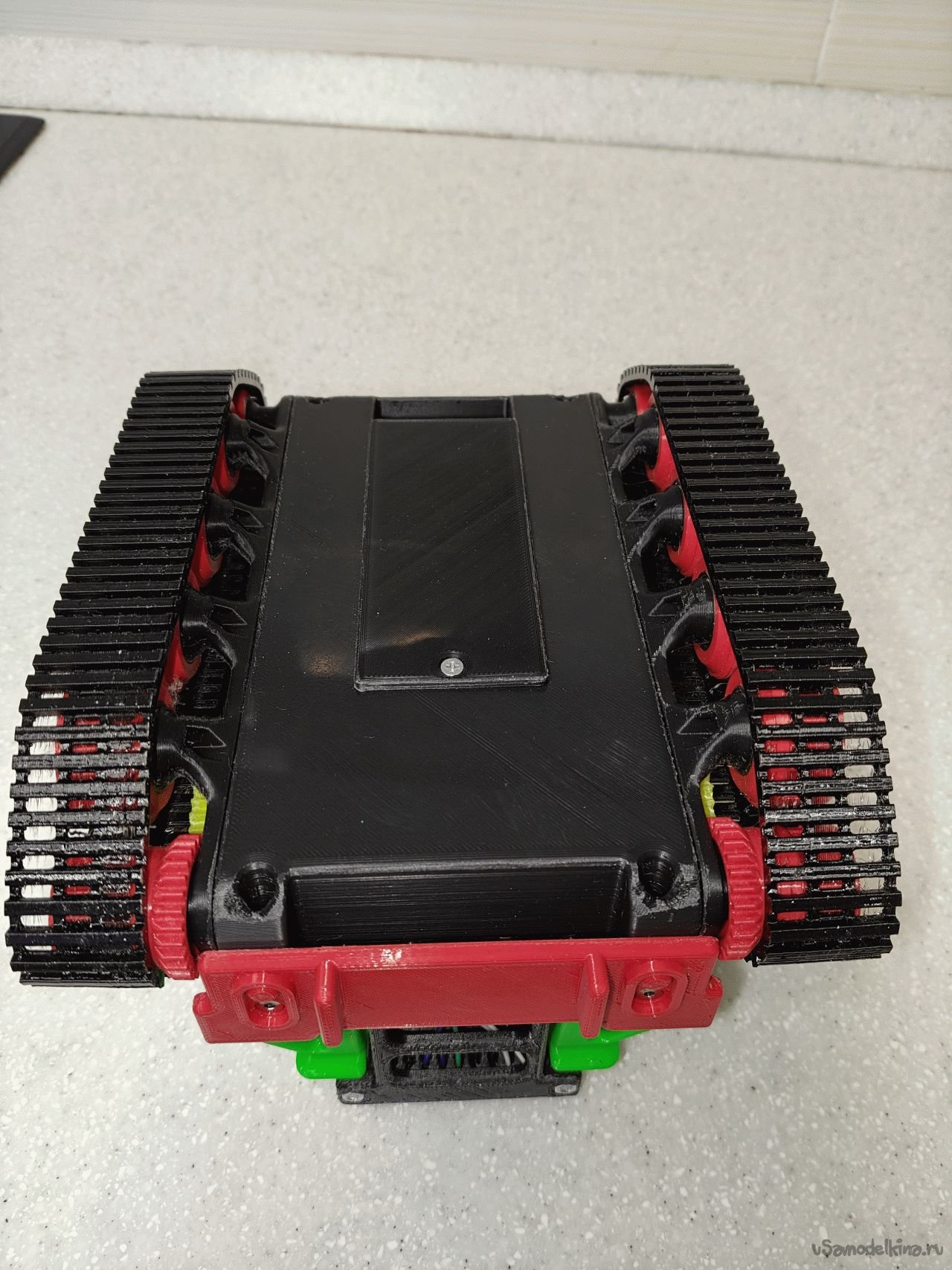
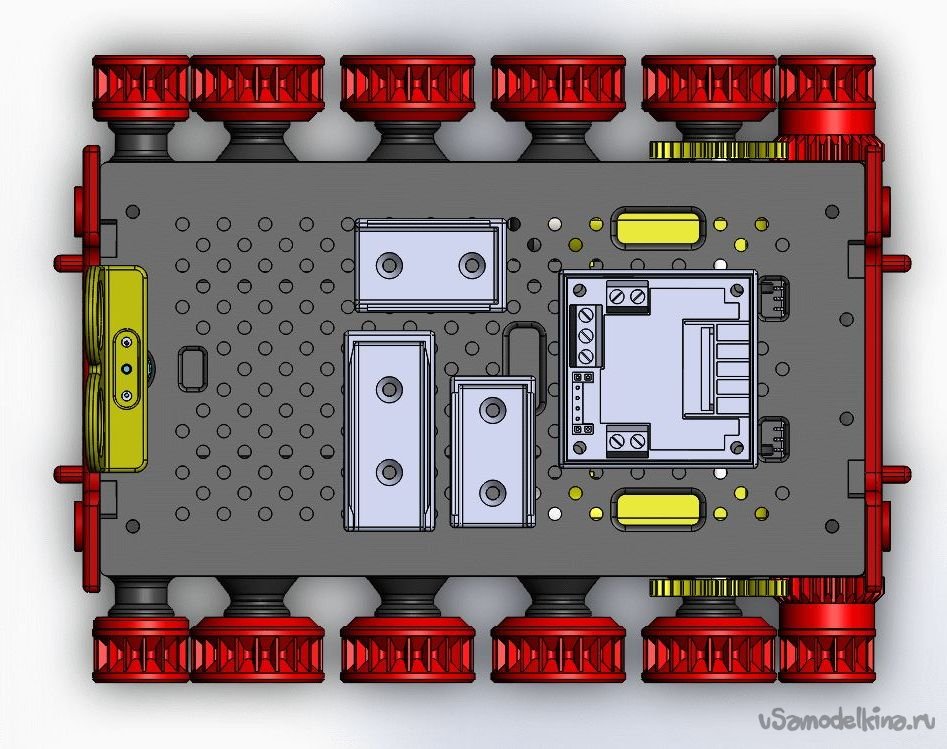
Вид сверху:
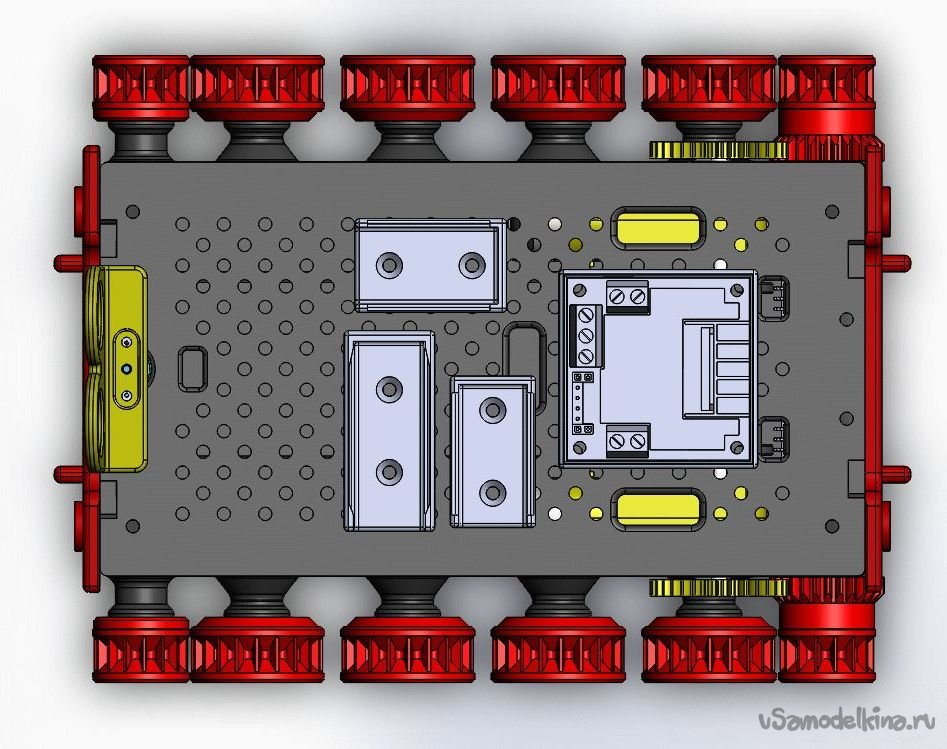
Вид сверху со снятой кабиной:
Вид сверху со снятой кабиной и крышкой основания корпуса:
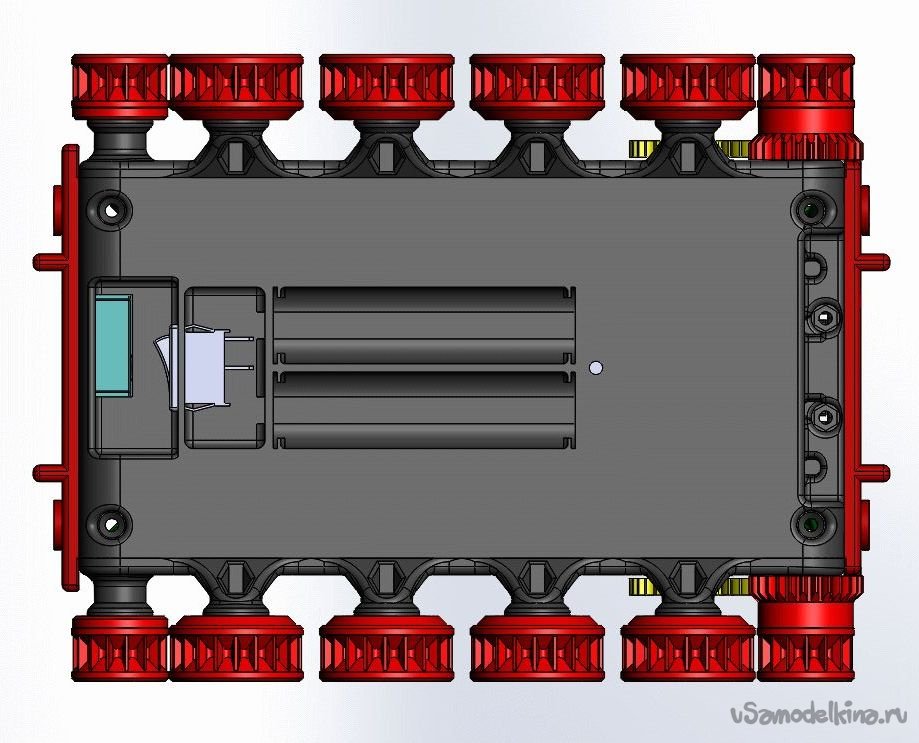
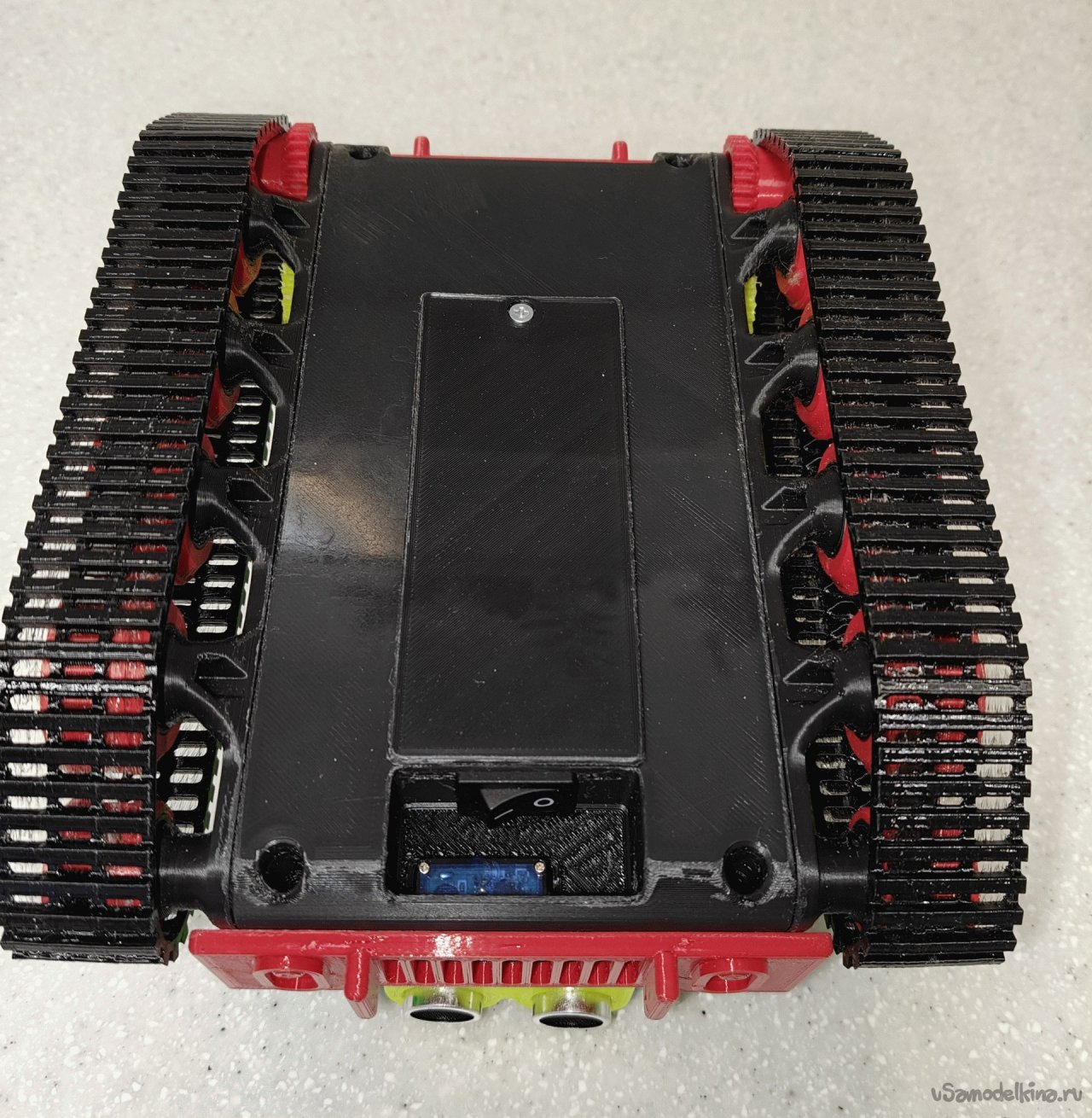
Вид снизу:
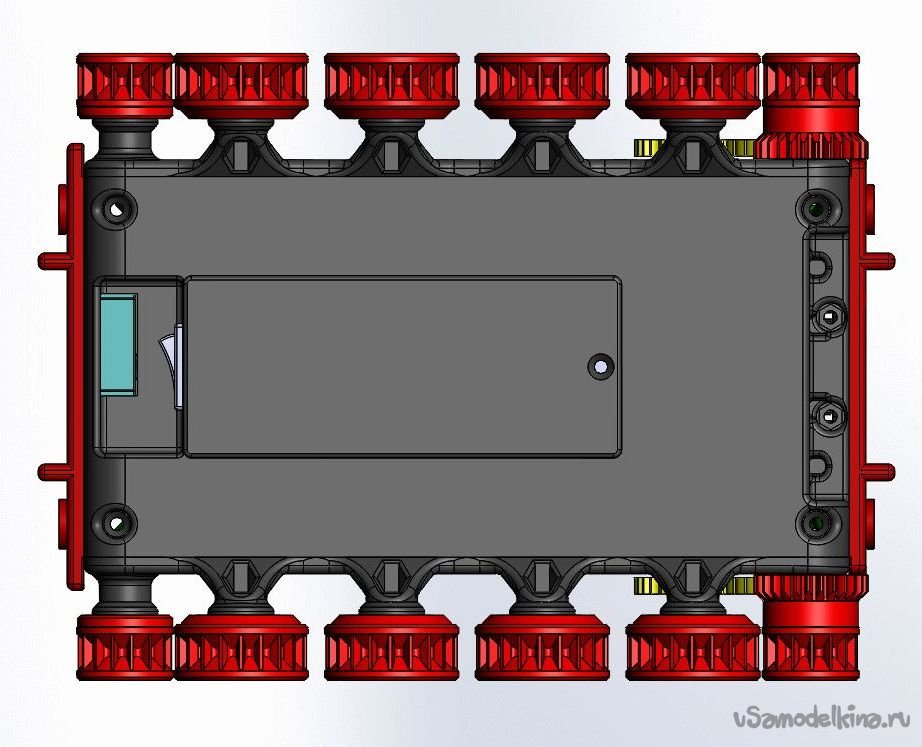
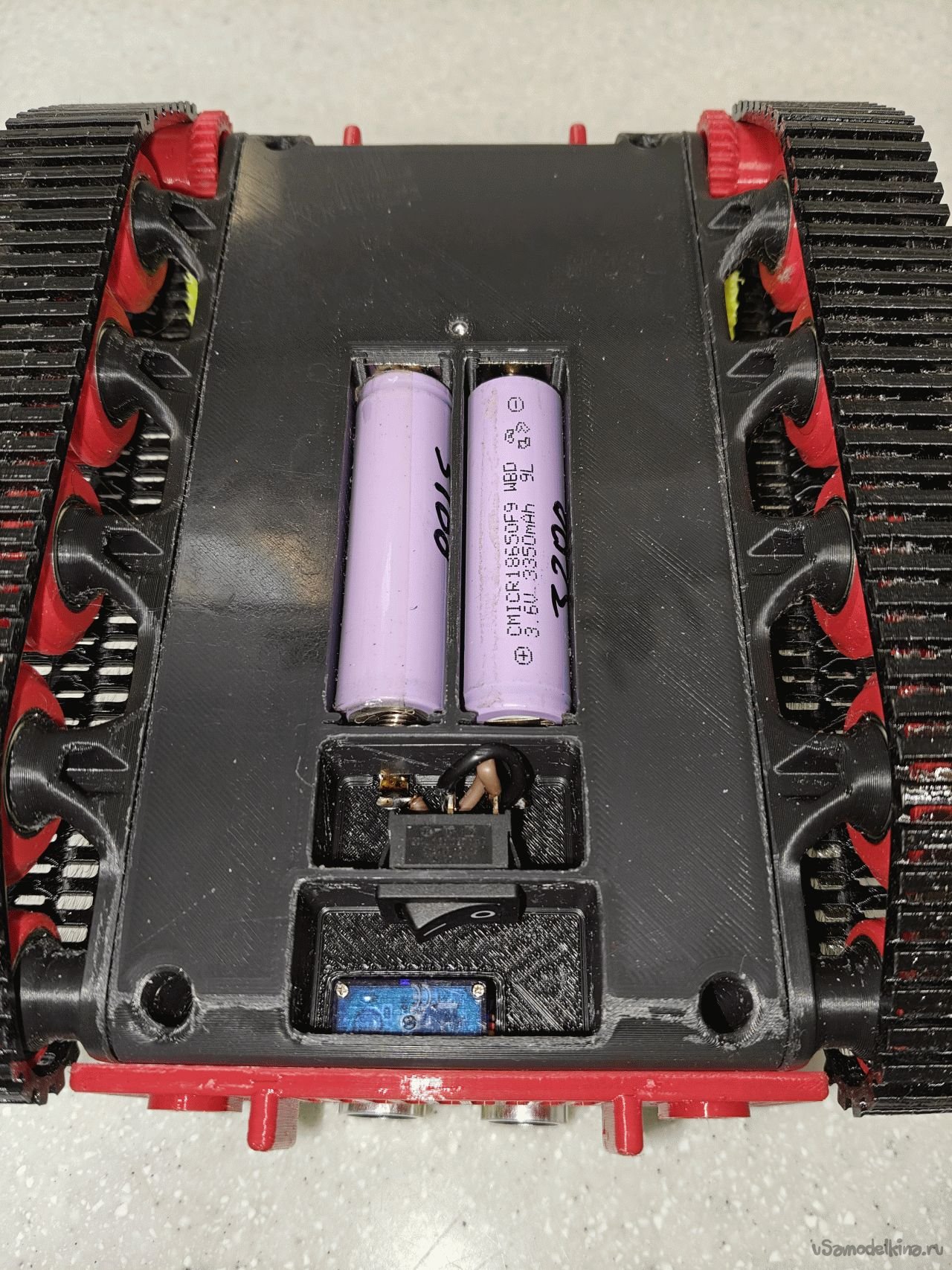
Вид снизу со снятой крышкой батарейного отсека:
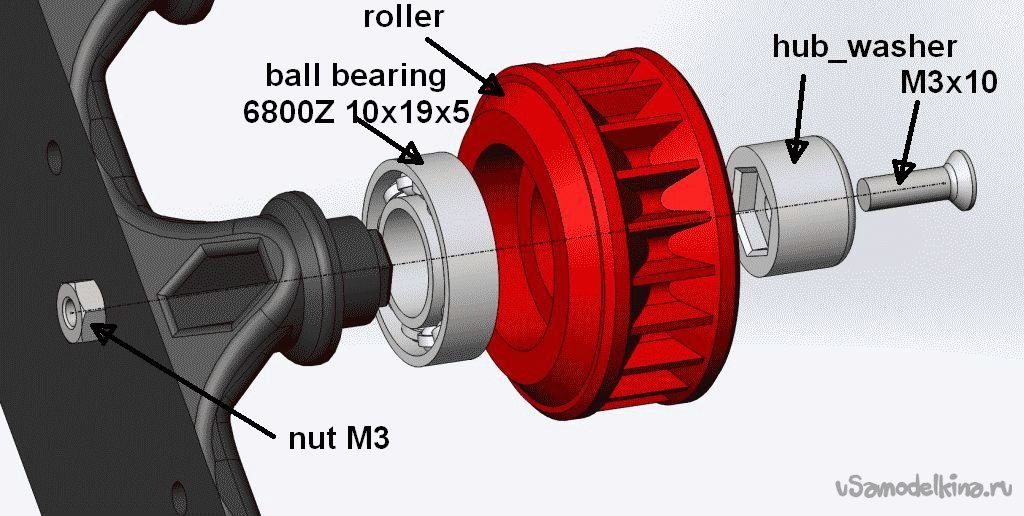
В узлах всех катков ходовой части применены китайские шариковые подшипники 6800Z типоразмера 10х19х5.
Схема сборки узла катка ходовой части:
В передней части корпуса находится сервопривод, на оси которого закреплен кронштейн с УЗ-дально-мером HC-04 – «голова».

Предполагается, что во время движения в автоматическом режиме, дальномер поворачивается туда-сюда в пределах угла ≈120° для обнаружения препятствий.
Расположение остальных компонентов как-то не критично, поэтому сейчас заостряться на них не буду.
Общий вид с разнесенными частями:
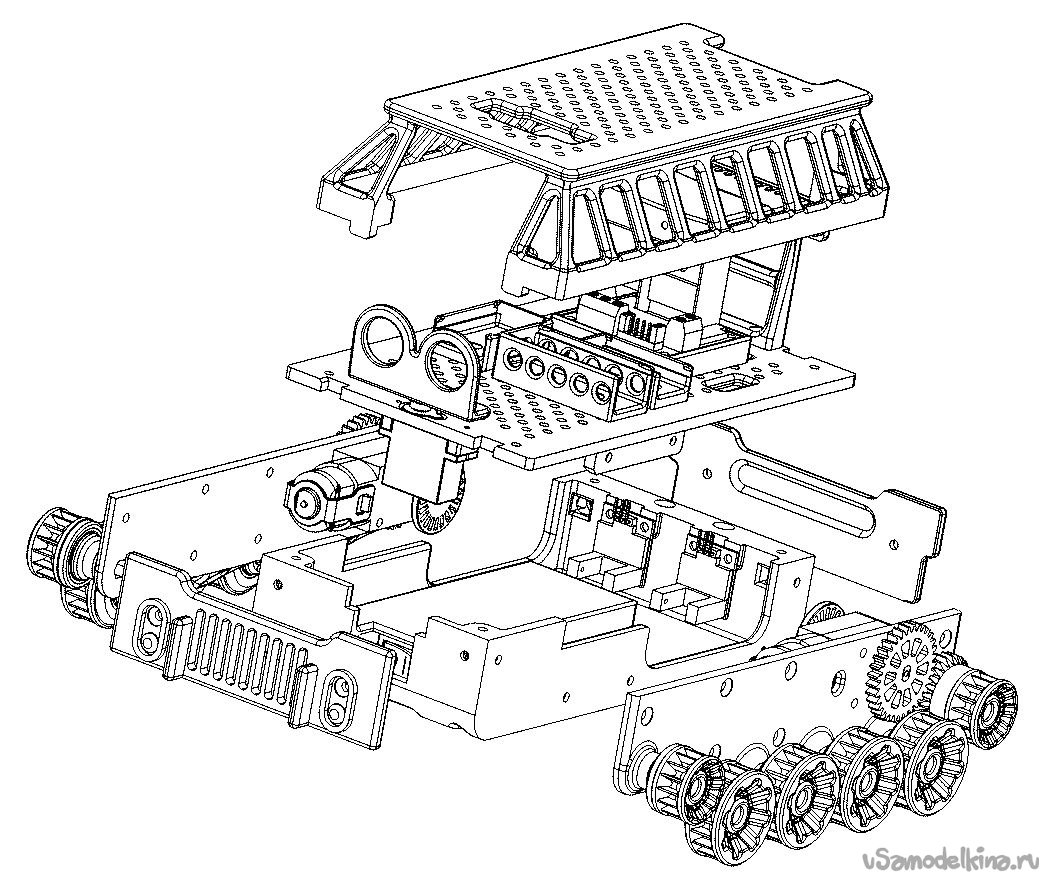
Все детали напечатаны на 3D-принтере “Tronxy-D01” из PLA-пластика, гусеницы из TPU.
Система управления.
Принципиальная схема:
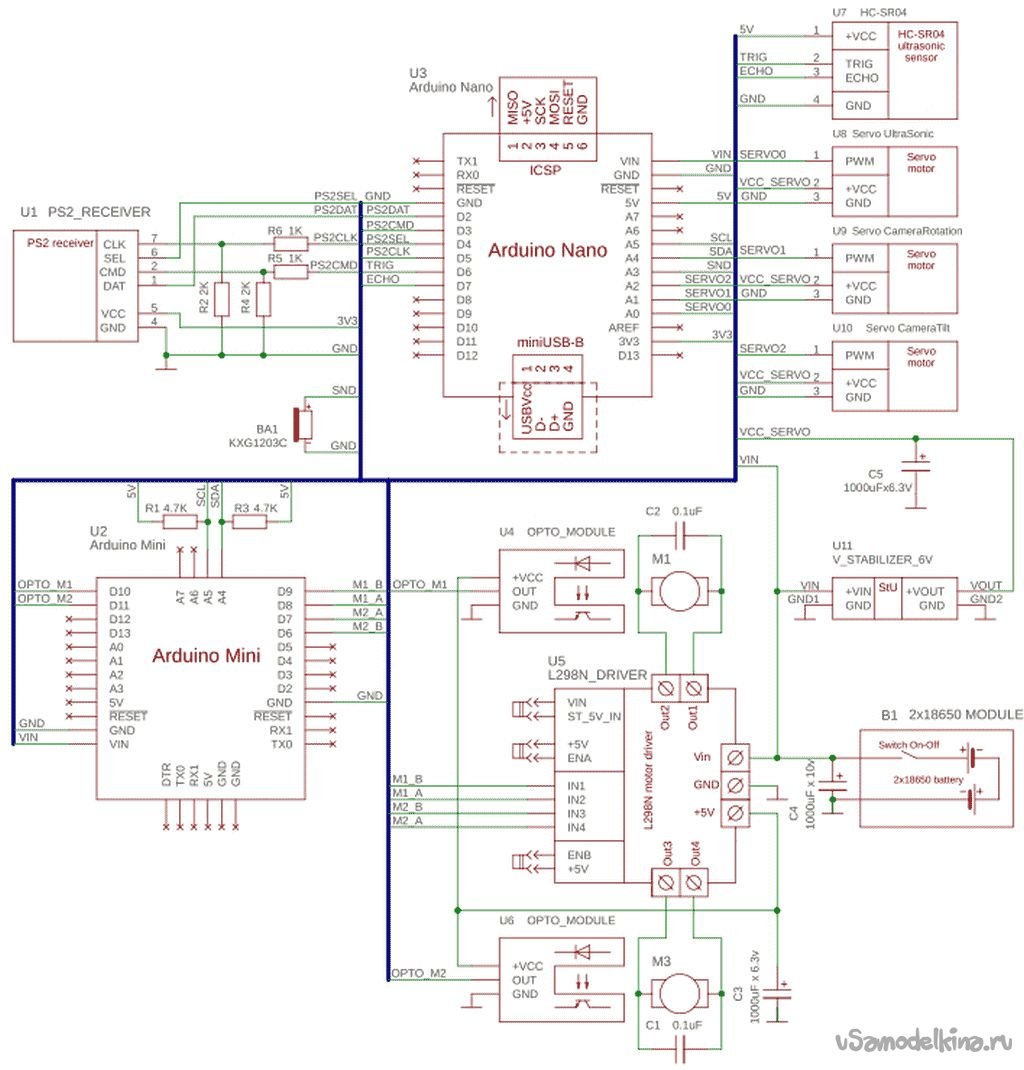
Предусмотрено два режима движения модели: режим с ручным управлением и автоматический.
Ручное управление осуществляется посредством пульта от PS2. Левый джойстик управляет левой гусеницей, правый – правой.
В режиме «авто» модель движется прямо, вращая «головой» в пределах угла ≈120°. Когда дальномер обнаруживает препятствие, модель останавливается, откатывается назад (время отката заданно в программе), затем поворачивает на случайный угол и движется дальше. Интересно наблюдать как, двигаясь в таком режиме, модель достаточно быстро находит выход из комнаты и, за довольно небольшой промежуток времени, уходит достаточно далеко от начальной точки.
Управление движением модели осуществляется банально – по «танковой» схеме, изменением частоты и направления вращения двигателей гусениц посредством пульта от PS2.
В двигателях гусениц применена обратная связь через оптопары U4, U6 и дырчатые диски на валах. Понятное усложнение с лихвой окупается более стабильным управлением движками. Управление моторчиками осуществляется посредством ШИМ, для чего применен модуль U5 с микросхемой 2х-канального Н-ключа L298N и отдельный контроллер U2 “Arduino Mini”. Выделить отдельный контроллер для управления движками пришлось из-за того, что для обратной связи были задействованы аппаратные прерывания, что конфликтовало с библиотекой управления сервоприводами.
Основное управление реализовано на контроллере U3 “Arduino Nano”. Этот контроллер осуществляет связь с приемником от PS2 U1, управляет сервоприводами U8 – U10, реализует логику автоматического режима движения и через канал I2C управляет контроллером двигателей.
Сервоприводы U9 и U10 предназначены для управления положением камеры, если камера не предполагается, эти сервы и стабилизатор U11 можно не устанавливать, а сервопривод УЗ-дальномера запитать от источника +5В платы драйвера L298N.
Резисторы R1 и R3 – подтяжка сигнальных линий I2C.
Резистивные делители R2, R6 и R4, R5 обязательны, если у вас приемник PS2 с питанием 3,3В, Если приемник с питанием 5В, делители не нужны, и все выводы приемника можно соединять с контроллером напрямую.
Прошивки для контроллеров приложены в сопутствующих файлах и, на мой взгляд, исчерпывающе прокомментированы, поэтому о программной части системы управления читать там.
Ну и фото с натуры:
Общий вид спереди:

Общий вид сзади: 
Вид слева:

Вид снизу спереди:
Вид снизу сзади:
Вид снизу сзади, снята крышка батарейного отсека:
Вид сверху, снята кабина:
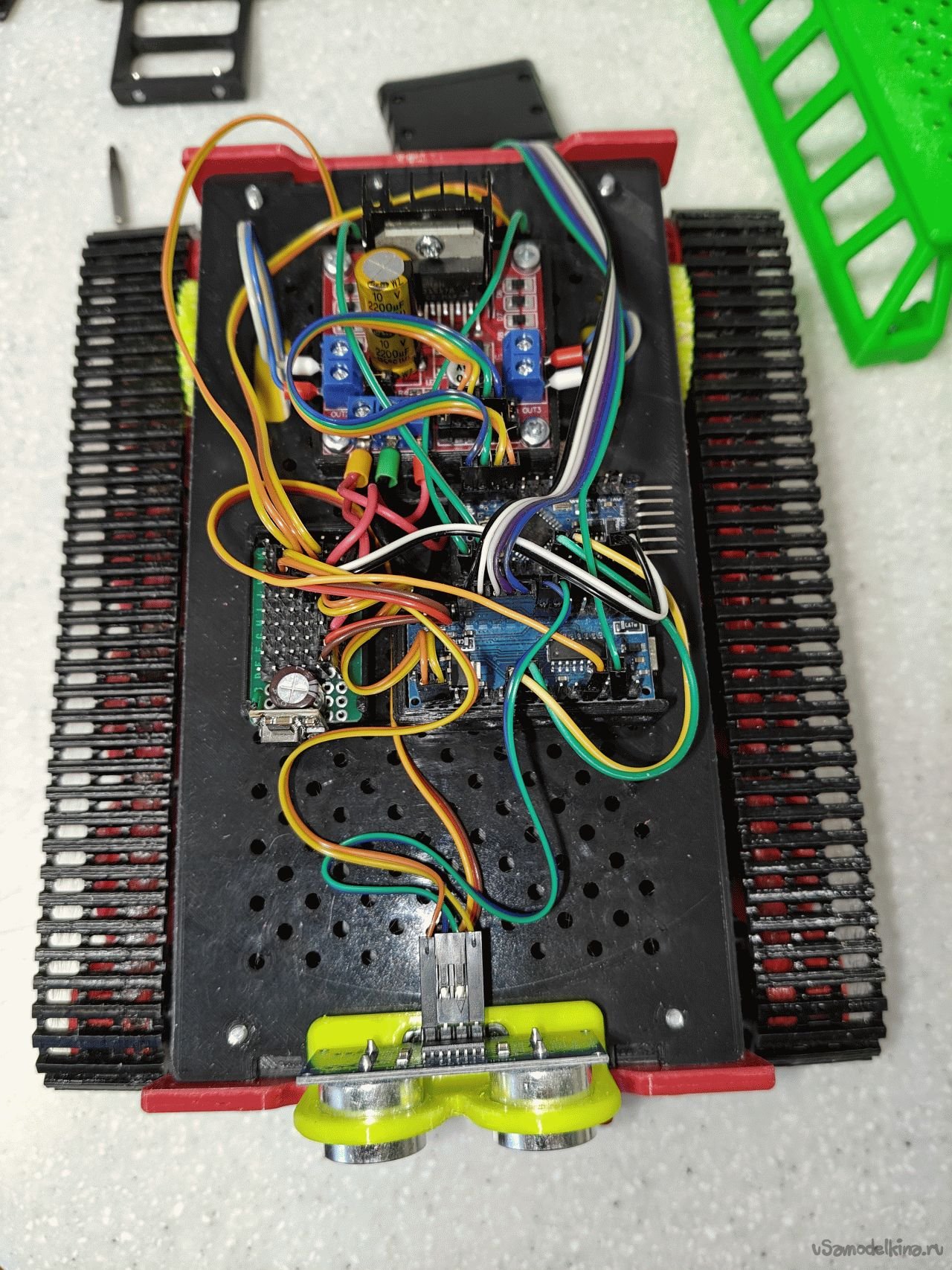
Вид сверху, снята кабина и поднята крышка основания:
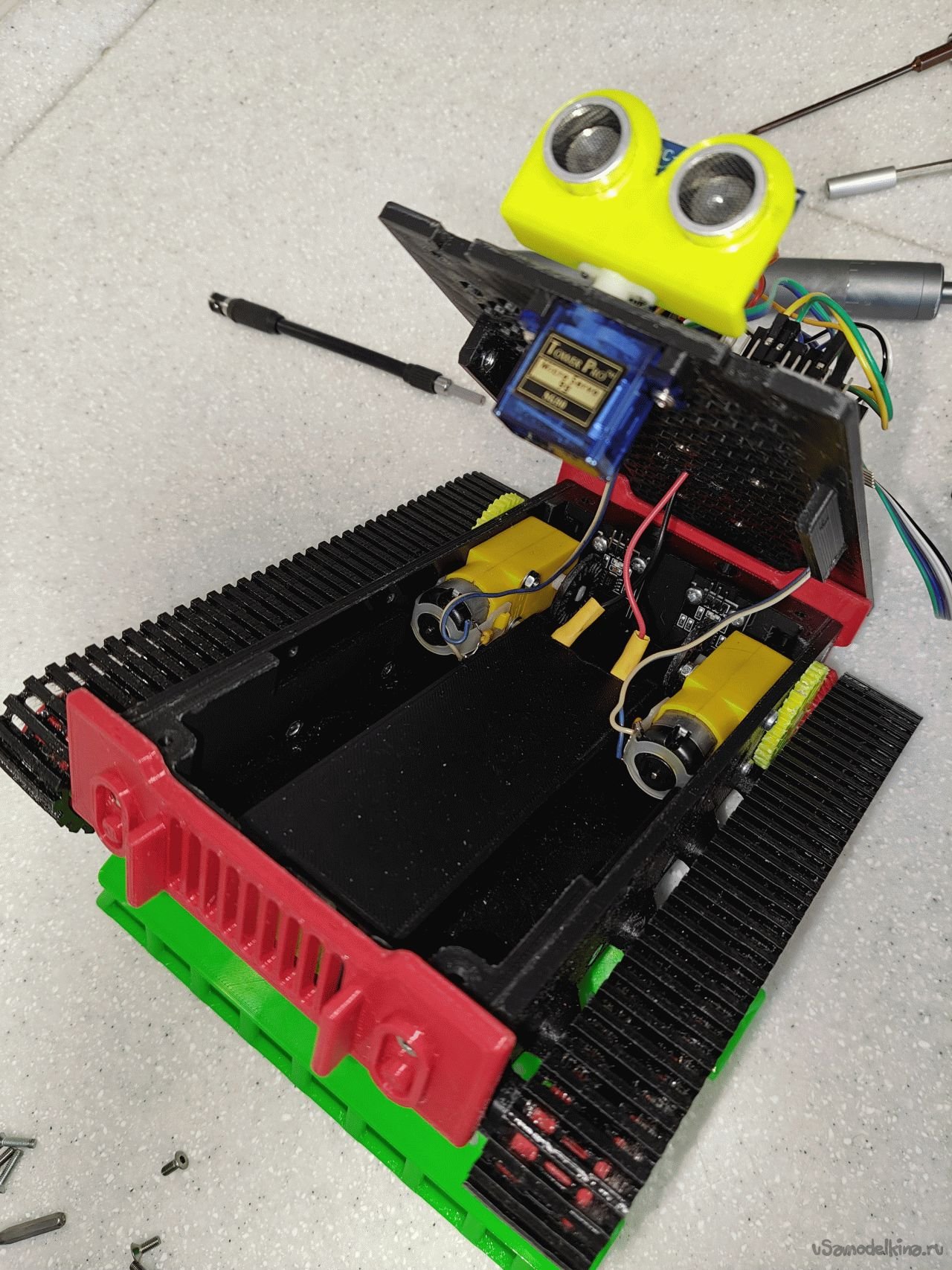
Вид на двигатели:
Видео ручной режим управления: [media=https://youtu.be/S2sWjdUI7v0]
Видео автоматический режим управления: [media=https://youtu.be/ARfAQLqvCds]
Все необходимые файлы можно скачать на моей странице на thingiverse.com: https://www.thingiverse.com/thing:6940777
Ну, вот на этом, собственно говоря, и все. Удачи!