


Всем привет! Сегодня продолжу рассказывать, как я докатился до такой жизни.
Когда я увидел на просторах интернета вот такую конструкцию, решил все, буду собрать, что то подобное.

Механику собрать в единую конструкцию было просто, попробовал присесть, вроде нормально, даже можно перемещаться, но как то не очень удобно.

Нужны электронные мозги, но это для меня было сложнее. Программированию меня не учили, не то время было, на просьбы о помощи получал серьёзный счет. Просмотрев авторов самодельных сигвеев, для себя ничего не подобрал. Но как говорится, когда очень хочется, то находишь варианты.
И так, для того, чтобы наездник, то бишь я, оставался в вертикальном положении, применил гироскоп вместе с контроллером ARDUINO UNO, который должен обрабатывал снятые данные с гироскопа.

Из-за отсутствия необходимой программы пришлось импровизировать. Нужно было применить что-то, что как то реагировало на смещение по вертикали. Лучшего чем серводвигатель я не нашел, к тому же программа для него нашлась в интернете. Он и стал центром управления в моём проекте.
И так, мне предстояло, как то связать наклоны гироскопа и включение ускорения вращения вала электродвигателя. Это был мой первый вариант решения задача и я ее победил следующим образом.


Серводвигатель я установил на склеенную раму. На вал закрепил три маленьких магнита, из расчета, северного, южного и северного полюсов, боковые магниты как бы отсекают включающее магнитное поле датчика Холла. По радиусу перемещения магнитов расположил датчики Холла. Датчики расположил один за другим так, чтобы когда, к примеру, впереди стоящий датчик включился, ссади стоящий датчик отключился. Так я избавился от двойного (синхронного) срабатывания рядом стоящих Холлов.


Настраивал переключение по светодиодам. Три датчика разместил под левое вращение вала серводвигателя, для движения транспорта вперед. Три под правое, для движения назад (торможения). Так подготовил управляющие сигналы для электрического переменного сопротивления.
 -
-
Перебрав мною опробованные варианты переменного резистора для ШИМ, решил остановиться на варианте с реле из геркона. Реле простое в изготовлении, к геркону приклеил спичку, зажал ее в шуруповерт и намотал провод толщиной 0.2 миллиметра примерно оборотов триста-четыреста, короче при подключении пяти вольт от питания Холлов, катушки срабатывают и совсем не греются. . Три получившихся реле переключают построечные резисторы ступенчато складывая , 60 Ком, 20 Ком и 20 Ком в 100 Ком.




Сам ШИМ применил готовый китайский, он компактный, мощный 55V 40A., имеет разъем для подключения переменного резистора и благодаря подключенным Холлам он может раскручивать двигатель в трех скоростных режимах.

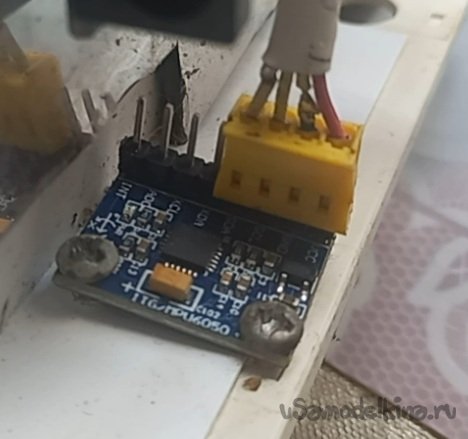
Центральный (четвертый) датчик Холла из семи, у меня, отключает ШИМ от питания. Когда магнитное поле активирует датчик, отрицательный сигнал блокирует постоянно подключенный управляющий положительный сигнал на мосфете NPN. Он отключает полевой транзистор PNP который и питает ШИМ от бортового напряжения двадцать четыре вольта. Этот Холл выполняет функцию свободного наката и спокойствие в вертикальном положения моей конструкции. Осталось решить задачу, как тормозить? Это решение опять на себя берет серводвигатель. На вал серводвигателя, в стороне от датчиков Холла «движения», для исключения их включения, установил два разно полярных магнита, которые воздействуют на микросхему от компьютерного вентилятора. Одно магнитное поле включает, скажем, левый вывод микросхемы, другое магнитное поле, правый вывод.

Сигнал с левого выхода подключил к входу транзистора КТ816, и уже с него управляющий сигнал двенадцать вольт, направил на два автомобильных реле двенадцать вольт тридцать ампер пять контактов. Подключение видите здесь.

Может у вас, дорогие читатели, появился вопрос, а почему применил реле? Попробую объяснить свою позицию.
Первое, жаба задушила, мосфетов для Н-моста надо четыре. Полумост в моей области обошелся бы примерно двести семьдесят рублей, а их два. А реле просто валялись в кладовке.
Второе, простата и компактность, не нужны радиаторы. Китайский ЩИМ сорок ампер выдает от силы примерно двадцать, так что реле на тридцать ампер должно отработать нормально. К тому же, переключение полярности происходит при нулевом напряжении, дуга отсутствует, контакты подгорать не должны.
Третье, этот вариант с двигателем, временное решение. Пока собирается бесщеточный двигатель, поиграюсь с этим двигателем.
Испытания провел на двигателе от шуруповерта. Собранная конструкция отработала на отлично. При наклоне двигатель включался и стабильно работал даже при небольших колебаниях датчика. При более сильном наклоне, обороты повысились. При дальнейшем наклоне, двигатель вышел на самые большие обороты. В вертикальном же положении датчика, двигатель остановился. Отклоняя датчик в противоположную сторону, двигатель включился изменив направление вращения.

На следующий день электронику приладил на транспорт, сел, сделал легкий наклон. Колесо медленно начало вращение. Прокатив меня четыре метра электроника резко отключилось, сбросив меня клюнув носом. Как потом выяснилось, сгорели три мосфета. Сгорели без хлопка и дыма, вот тебе и сорок ампер в китайском ШИМе. Видать перегрузил схемку. После этого вплотную занялся увеличением редукции, в прошлой статье я все подробно описал.
Еще раз покупать такой ШИМ не стал. Решил воспользоваться китайским вело контроллером, а почему и нет? Так я подошел ко второму варианту электронных мозгов

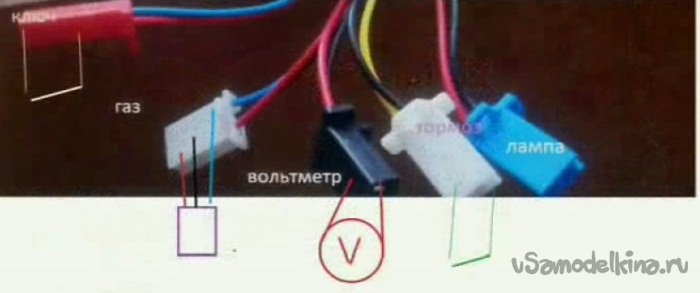
Подкупило то, что в контроллере заложено. Нет не вывод под ключ, не электрический тормоз, не вывод под фару и вольтметр. Управление оборотами двигателя мне очень понравилось. В нем ШИМ работает не от изменения сопротивления, а изменения напряжения.

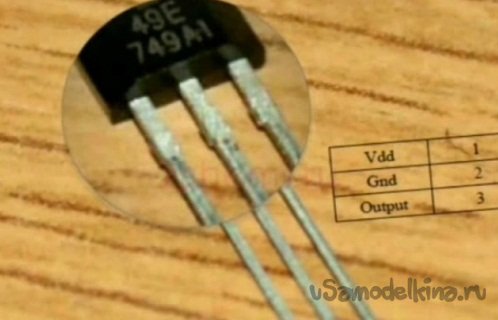
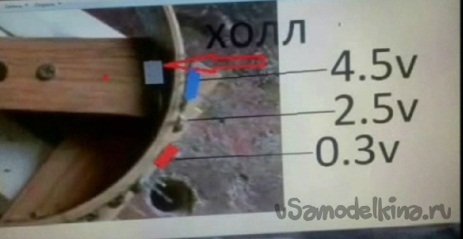
Взял датчик Холла ss49Е, такой устанавливают в ручку газа электротранспорта. Работа этого Холла интересная, когда он подключен к питанию, на выходе у него примерно сразу три вольта. Когда на него воздействовать одним магнитным полюсом, напряжение падает примерно до ноль целых четыре десятых вольта, если другим, подымается примерно до четыре и шесть десятых вольта.



Применив этот китайский контроллер , я упростил сборку. Для начала все разобрал и очистил. Вместо вращающихся на валу магнитов вклеил датчик ss49Е, а вместо кучи датчиков по окружности закрепил один южный полюс магнита там где стоял датчик отключающий двигатель, вертикальное положение гироскопа и северный, там где находился датчик включающий полные обороты двигателя. То есть сервопривод подменил стандартную ручку газа электротранспорта. Датчик, переключающий реверс заменил на Холл SS41Е. Попробовал еще разок поиграться с двигателем от шуруповерта, Обороты при наклоне плавно вышли на средние обороты, они не менялись градусов десять. Это связано с расстоянием между управляющими магнитами, и после дальнейшего отклонения датчика, плавно увеличились обороты до максимума.
При отклонении гироскопа в противоположную сторону, реле переключит направление вращения вала двигателя.




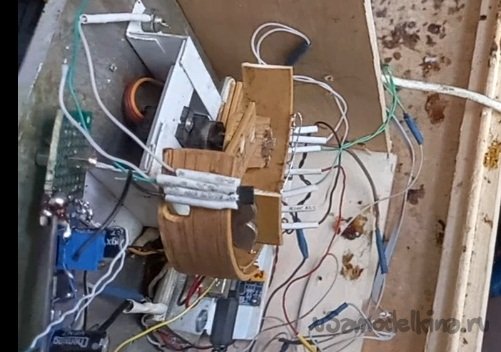
. Конструкцию колеса слегка изменил для удобного размещения аккумуляторов и электроники. Над колесом приварил металлический лист, на котором собрал корпус с отсеком для аккумуляторы и тремя выдвижными пластинами из фанеры. На первой пластине, на поролоновой подкладке закрепил «электронные мозги», так смягчится микро вибрация при движении работе двигателя. На второй, исполняющий серво блок и преобразователь напряжения для питания электроники. На третьей, реле и контроллер. Каждая пластина отключается от общей схемы разъёмами, для удобства ремонта при необходимости.




В верхней части корпуса сделал надстройку для контроля оставшегося напряжения, контроллер отключается при двадцати вольтах. На будущее, надо поставить обманку для контроллера на повышайке с фиксированным напряжением двадцать четыре вольта, чтобы избежать неожиданного включения защиты аккумуляторов при движении.
Так же установил на надстройке тумблер вместо ключа, для полного включения- включения электрики.
Закончив перенос электроники в корпус шайтан колеса, проверил работу электронных мозгов на двигателе от шуруповерта. Убедившись в правильном исполнении команд, подключил силовые провода на основной двигатель. Даже угадал с правильным вращением вала.



Пришло время испытания, присел на корпус, включил батареи, выровнял транспорт в вертикальное положение. Щелкнул тумблер-ключ зажигания, Колесо плавно поправило вертикальное положение. Вольтметр показал двадцать четыре и четыре десятых вольта. Пробую делать наклон вперед упираясь ногами, чувствую выравнивание по вертикали, колесо поднырнуло под меня. Ну с богом, подумал я, сделал еще раз наклон, слегка оторвал растопыренные ноги от пола. Колесо задергалось и потащило меня вперед, наклон назад, колесо стало затормаживать и после остановки дергаясь, потащило в обратную сторону. Выравниваю вертикаль, подымаюсь, выключаю зажигание. Испытание показало, так я далеко не уеду. Мозги надо дополнять при помощи библиотек PID и KALMAN. Серводвигатель от вибрации работает с большой амплитудой, а от сюда команды на двигатель то вперед, то тормоз!


Я подумал, как добиться плавного хода двигателя и нашел интересный и не дорогой вариант решения проблемы. Но это в следующей статье.


