


Итак, взяв у сына lego technic, а у себя Arduino Nano приступил к совмещению этих конструкторов.
Нам понадобится:
- Lego Technic (наборы 42029 и 42033)
- Arduino Nano (ссылка на плату)
- DRV 8833
- 2 сервопривода SG-90
- IR приемник
- Мотор-редуктор
- 2 светодиода
- 2 резистора 150 Ом
- Конденсатор 10v 1000uF
- 2 однорядных гребенки PLS-40
- 2 разъема PBS-20
- Катушка индуктивности 68мкГн
- 4 NI-Mn аккумулятора 1.2v 1000mA
- Коннектор папа-мама двух контактный на провод
- Хомутик
- Провода разных цветов
- Припой
- Канифоль
- Паяльник
- Болтики 3х40 и гайки и шайбы к ним
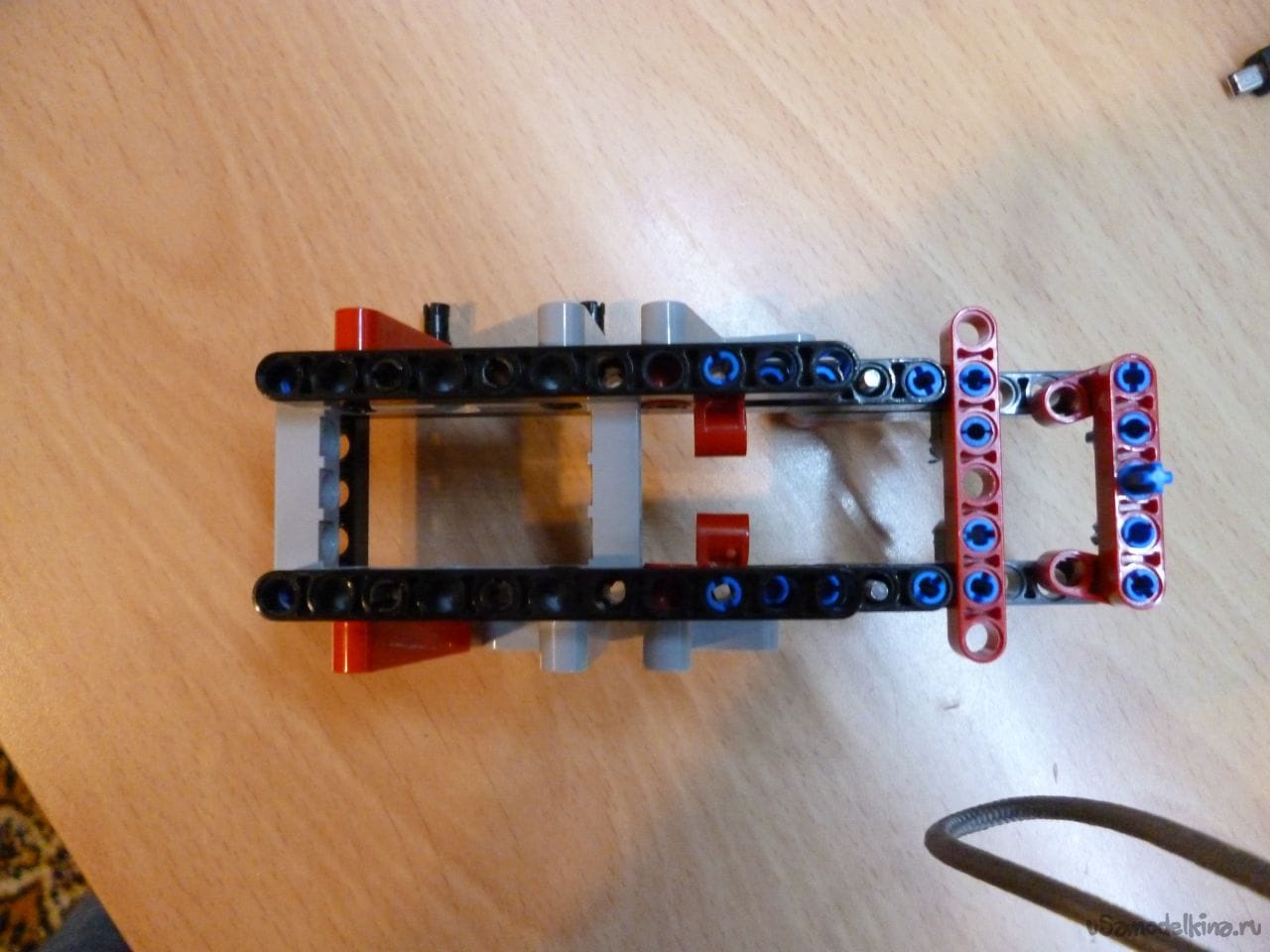
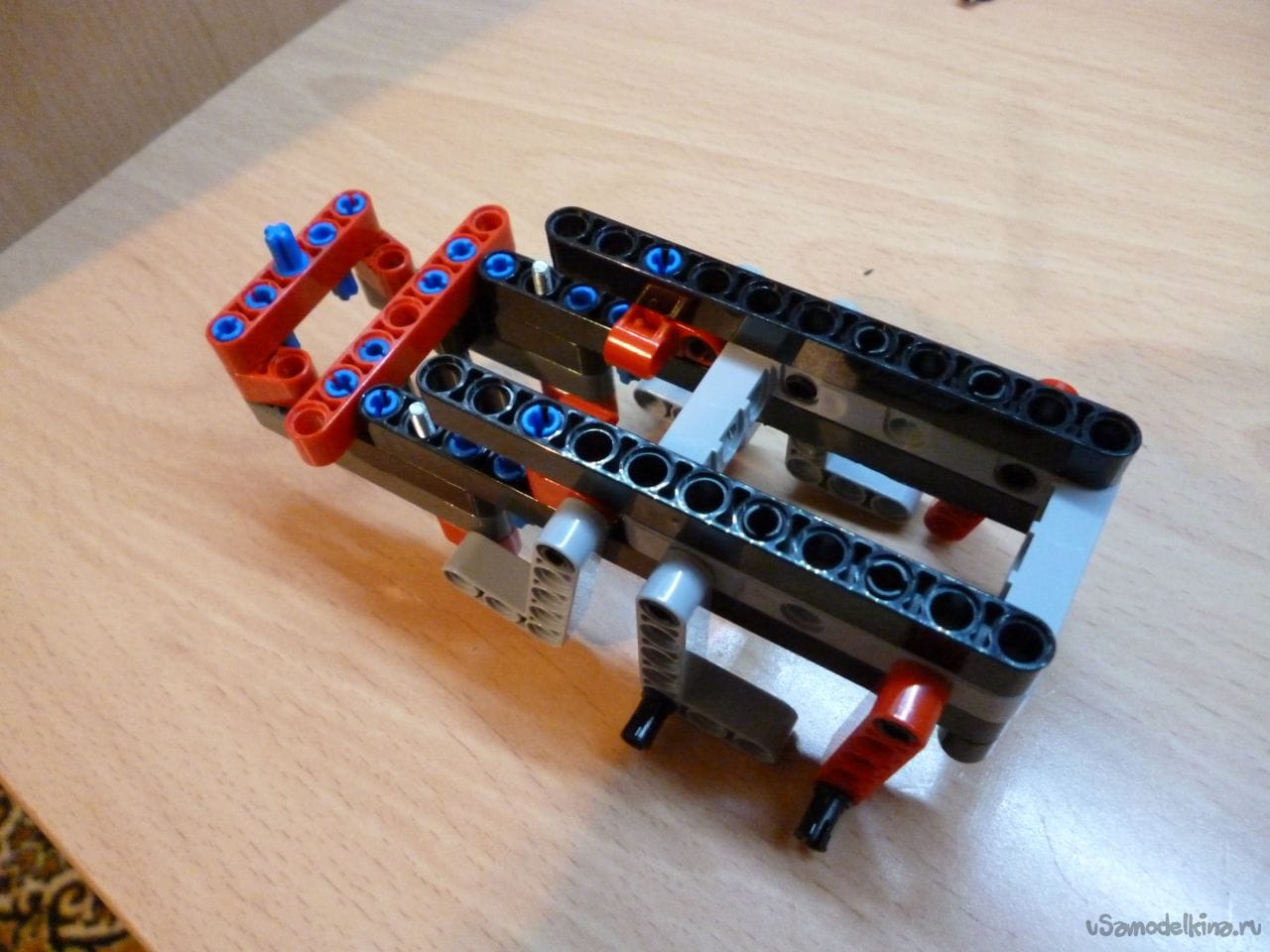
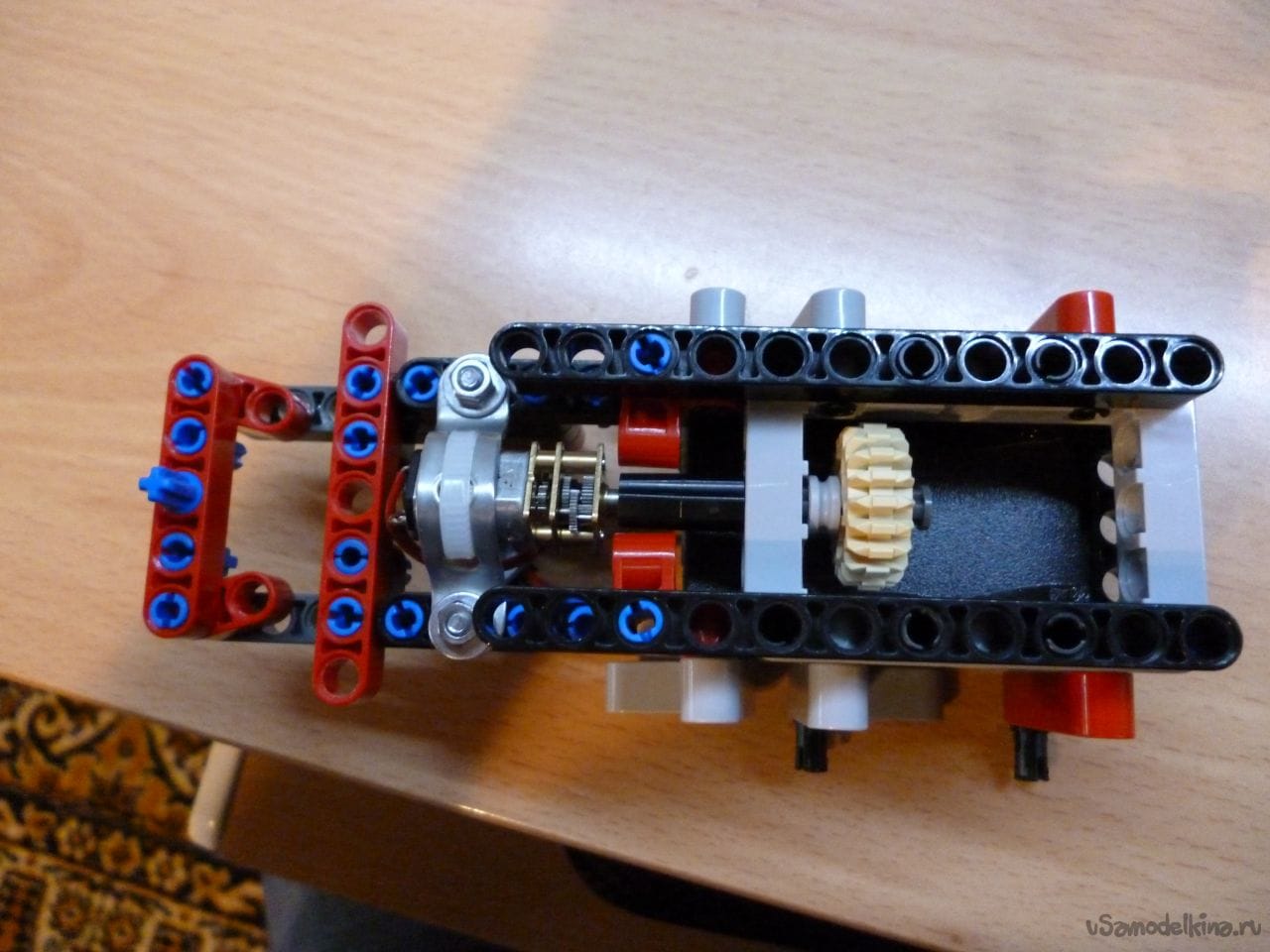
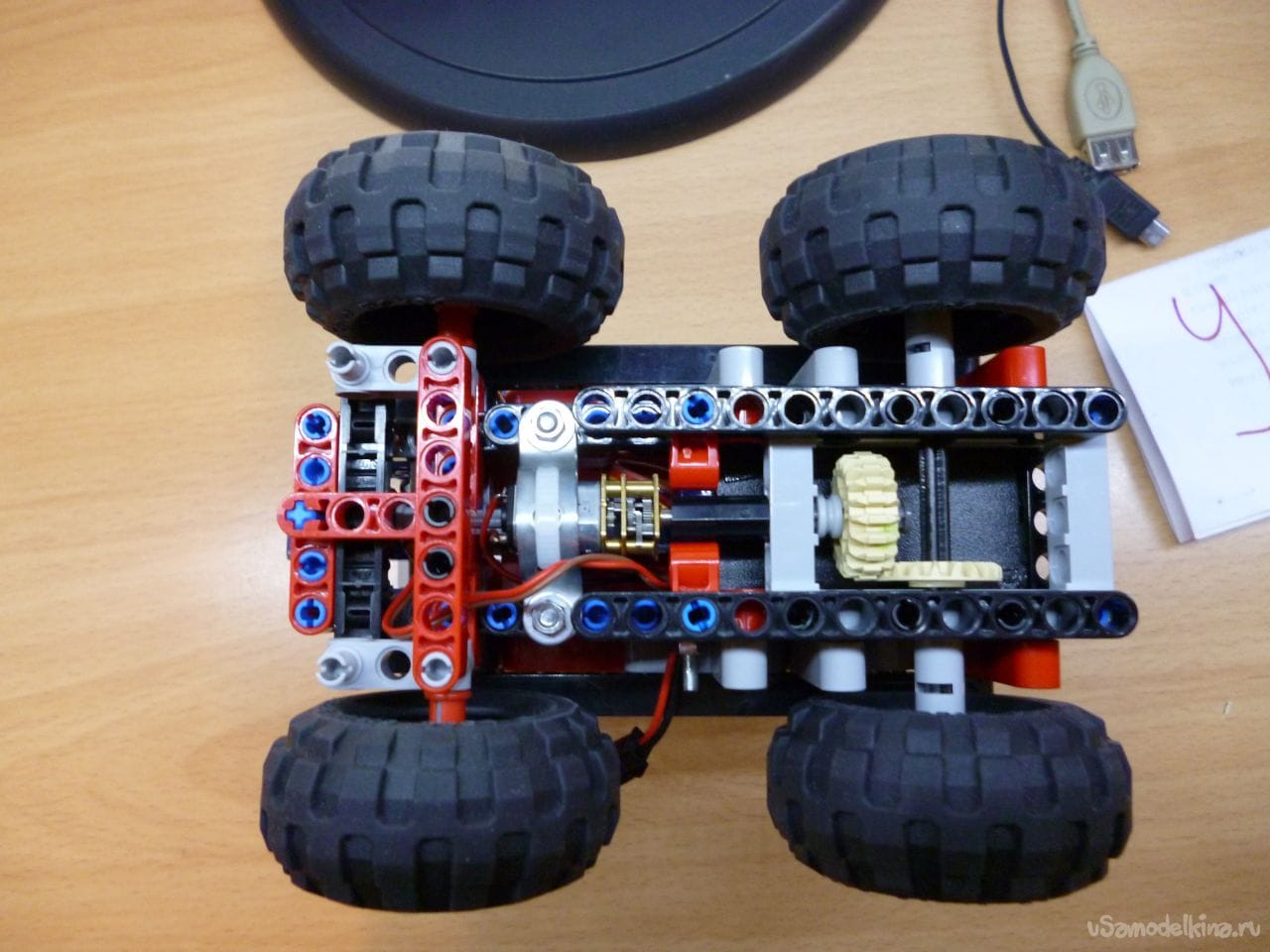
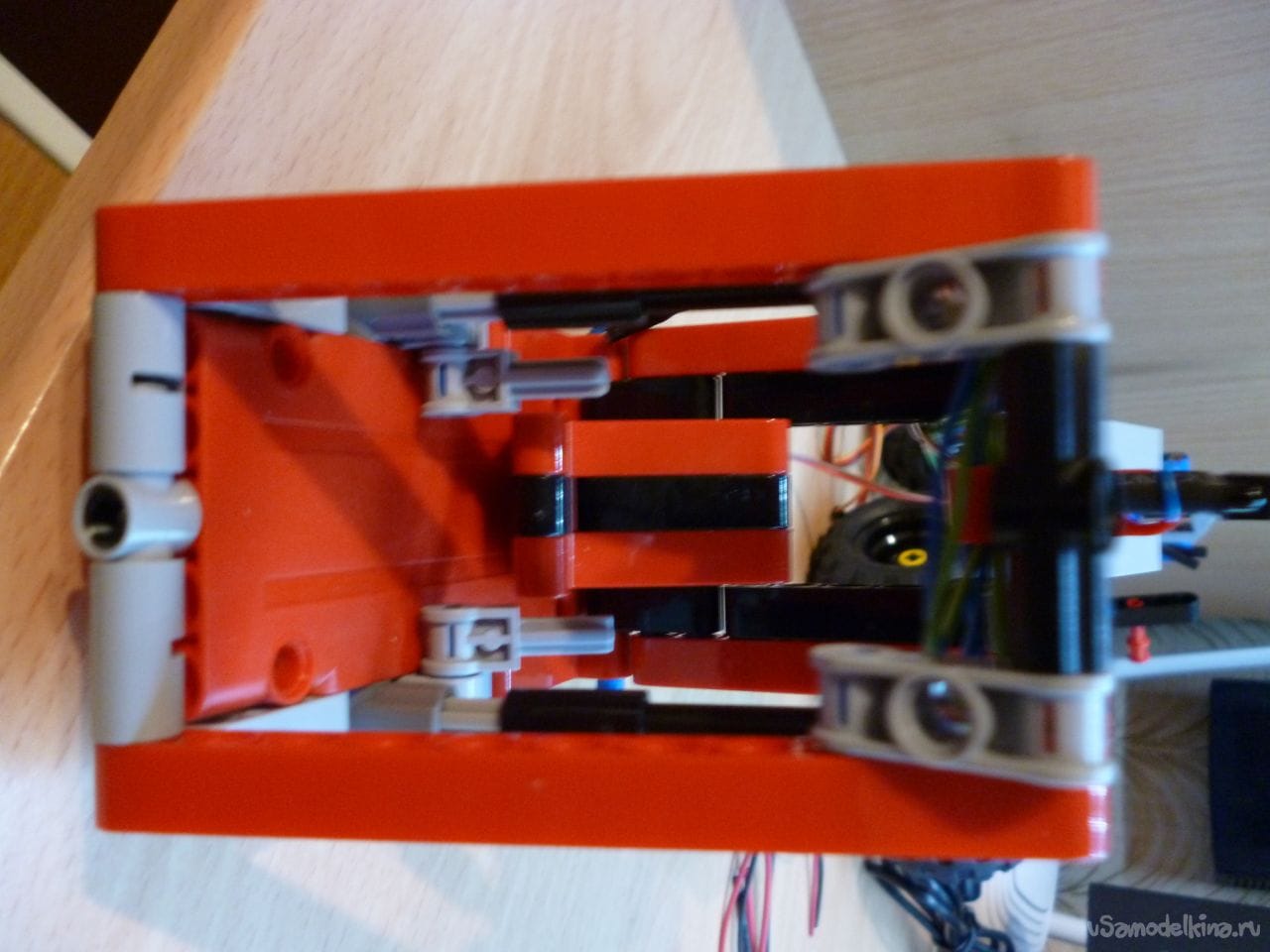
Шаг 1 собираем шасси и ведущую ось.
Собрать шасси из Technic можно любое, у меня получилось так.
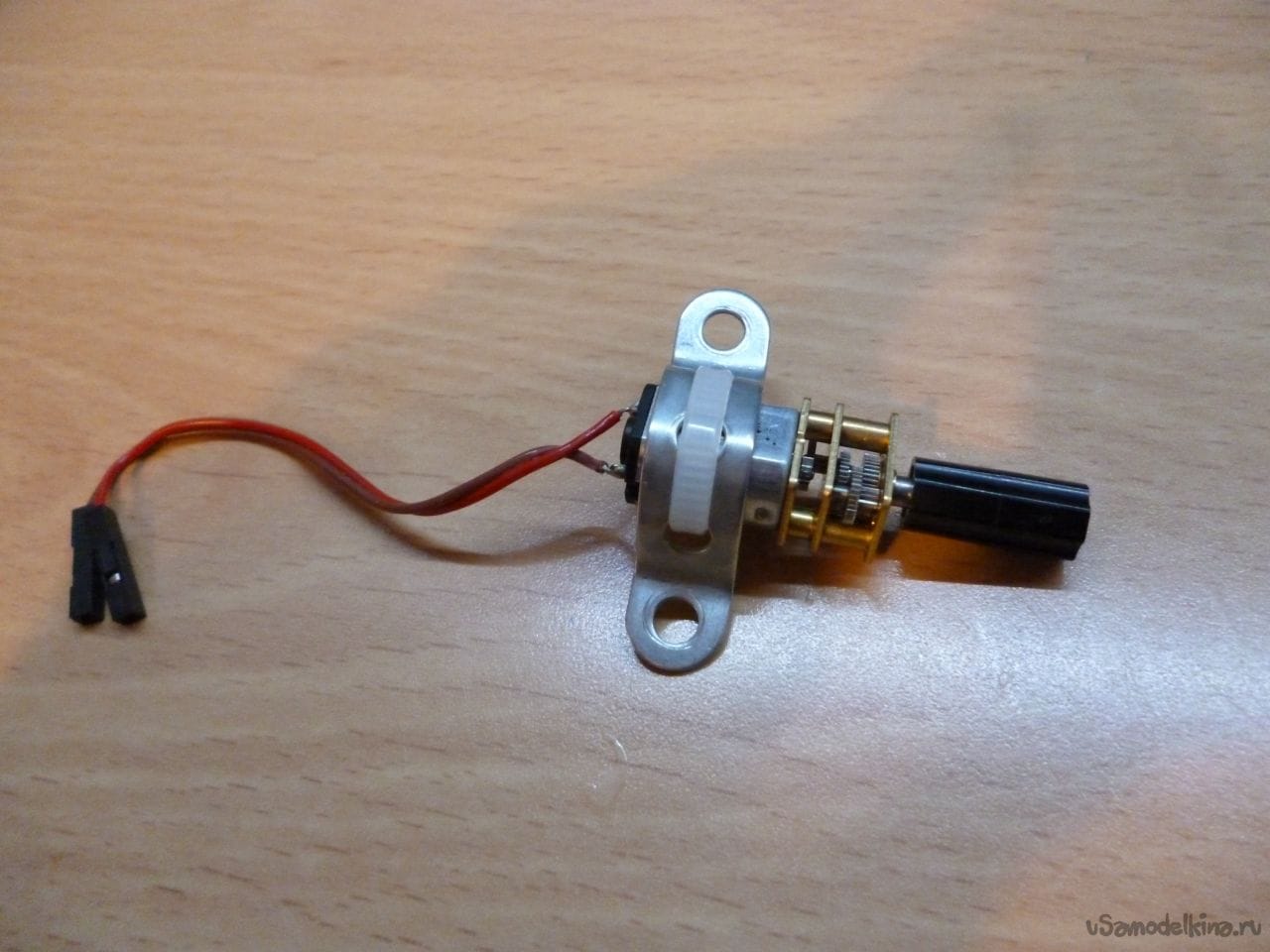
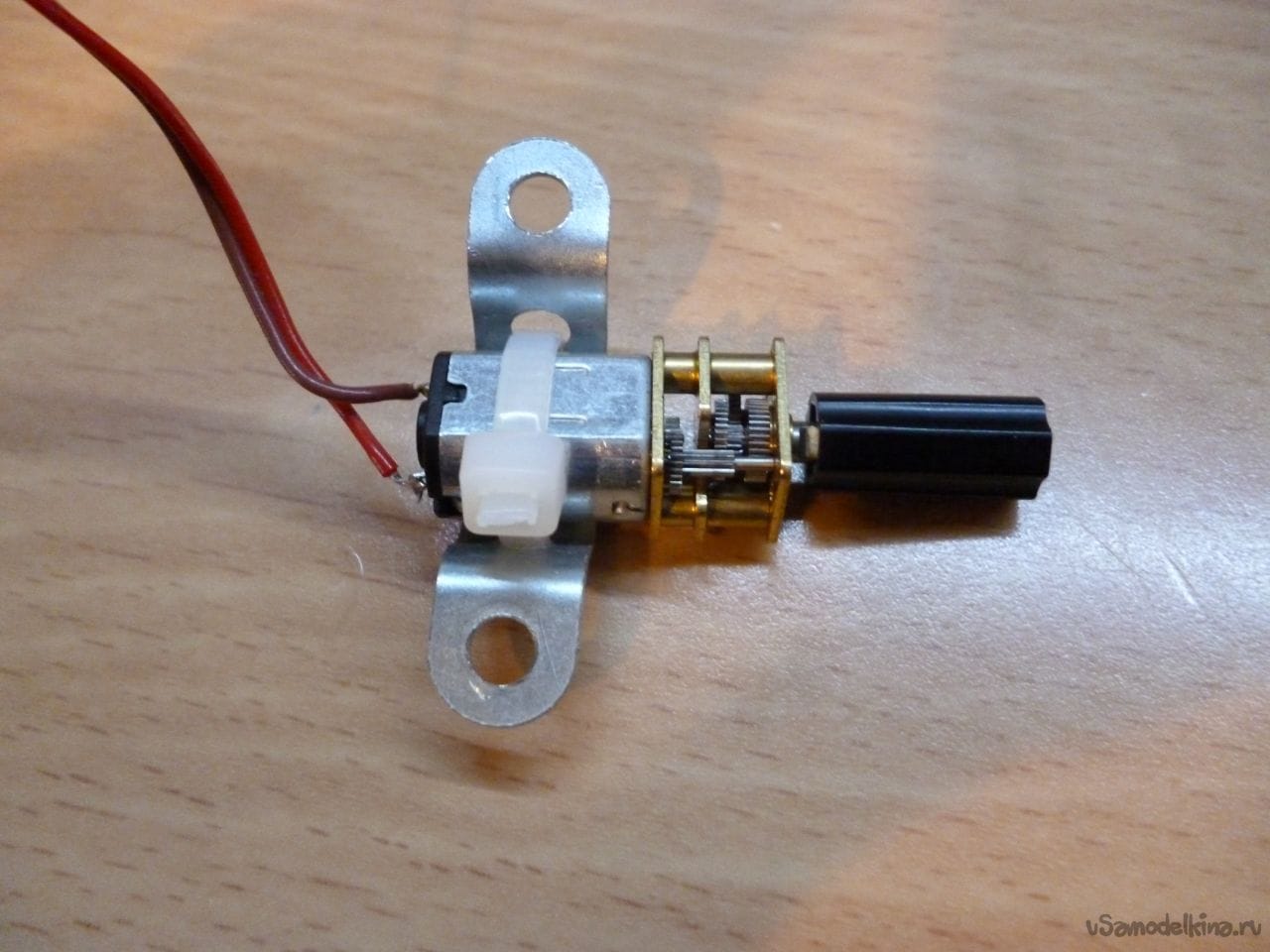
Возникает только проблема соединения мотор-редуктора с деталями конструктора. Я решил это следующим образом: надел на ось мотор-редуктора соединительную втулку и вставил обрезок спички для фиксации. Для крепления мотор-редуктора использовал металлическую пластику от железного конструктора и хомутик. Получилось следующее:
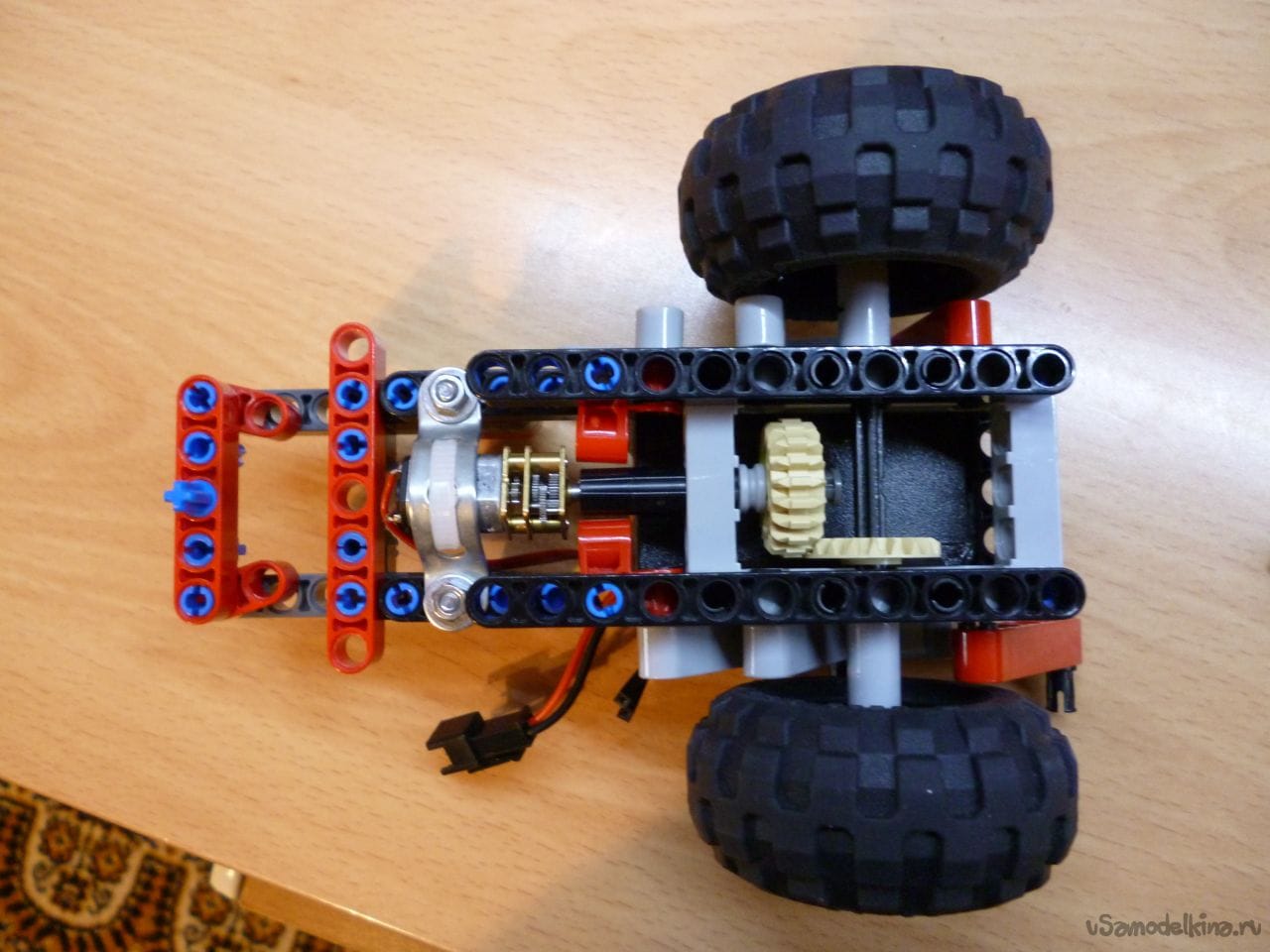
Далее устанавливаем получившуюся конструкцию на шасси использую болтики 3х40:
И надеваем колеса:
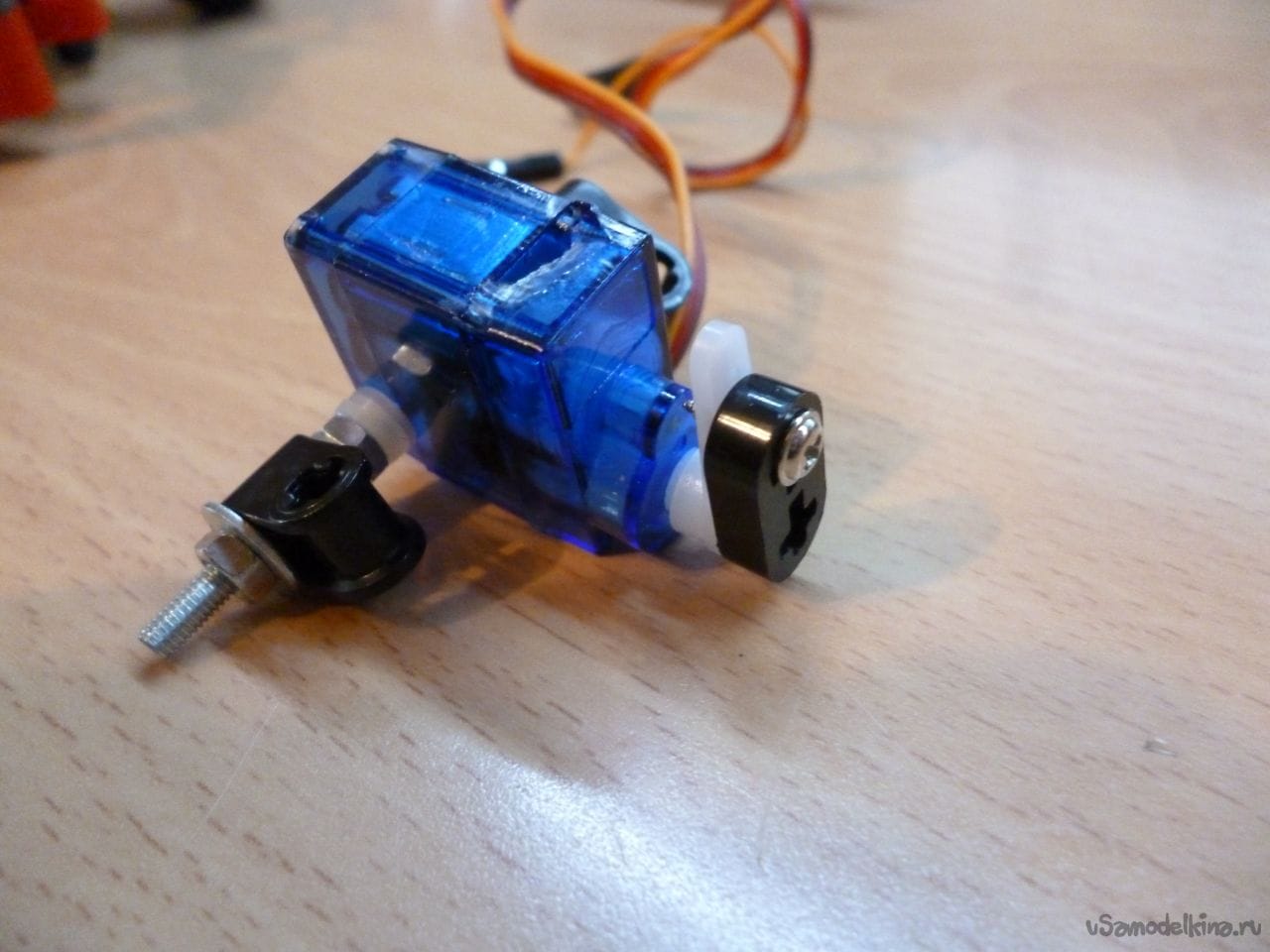
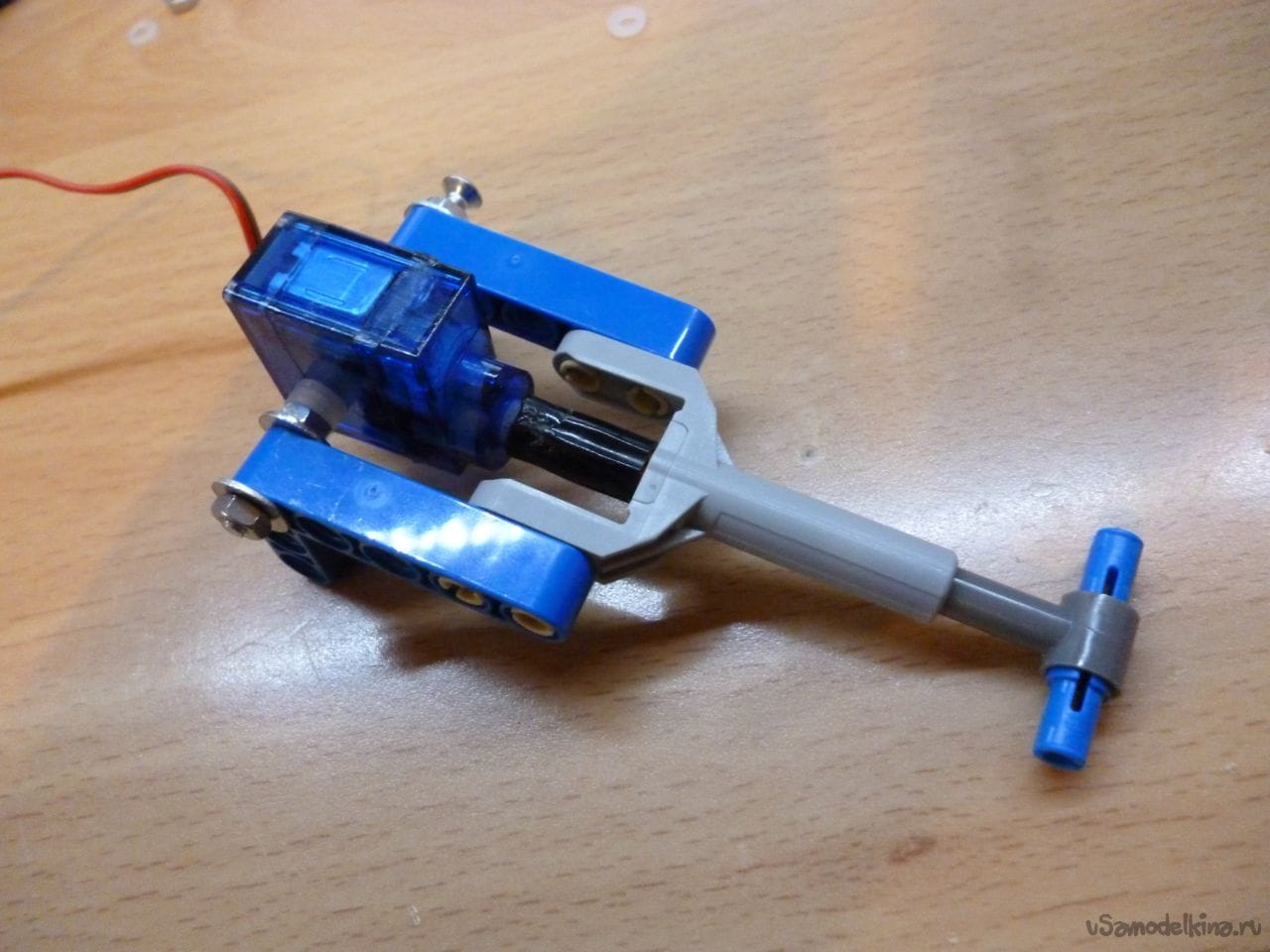
Шаг 2 поворотные колеса
Для осуществления поворота взял сервопривод SG-90. Надо аккуратно просверлить, чтобы не задеть внутренние части, сквозное отверстие диаметром 3.2 мм или просто вырезать канцелярским ножом.
Вставляем болтик в проделанное отверстие, а по краям уголки и фиксируем гайками:
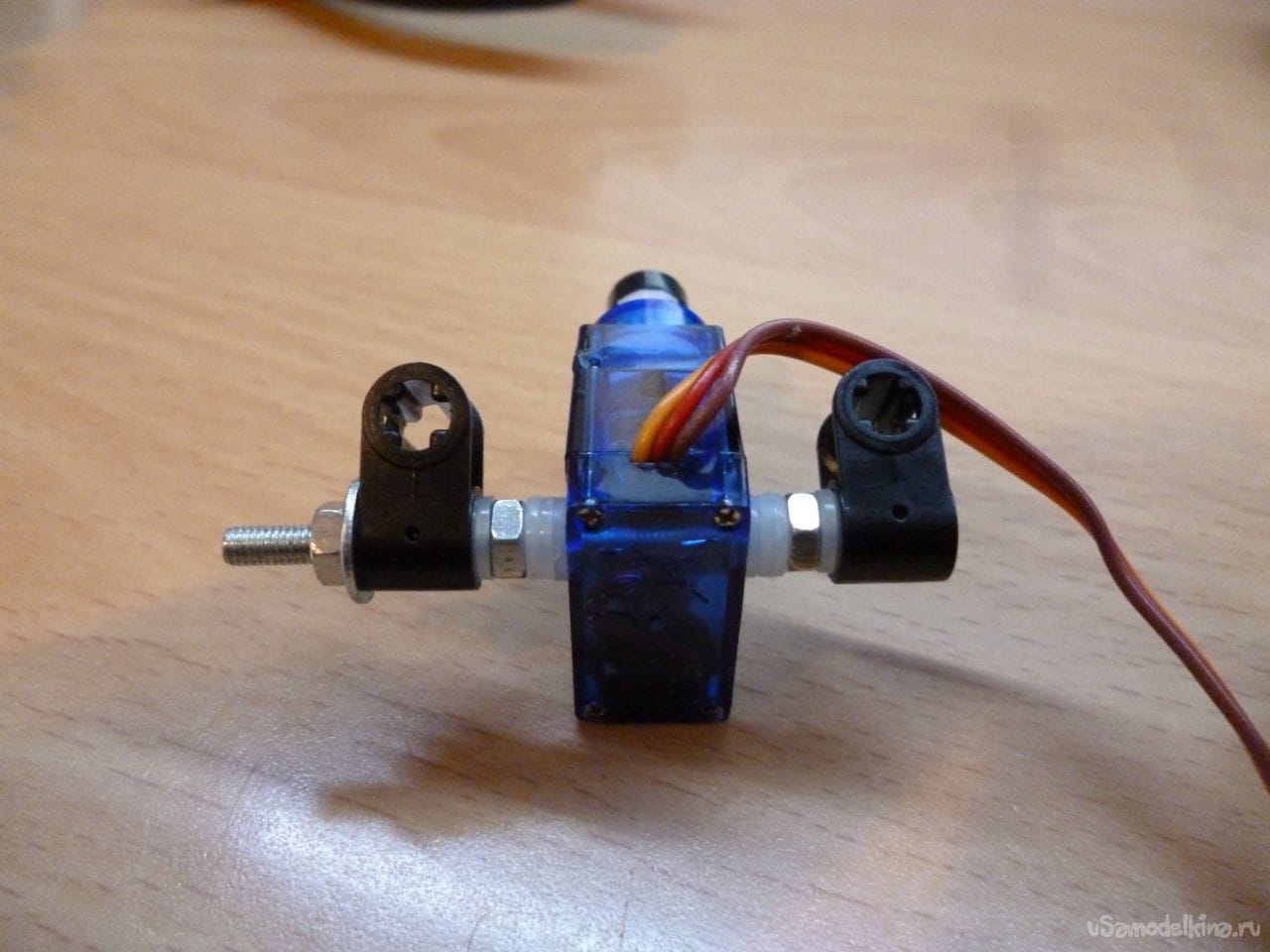
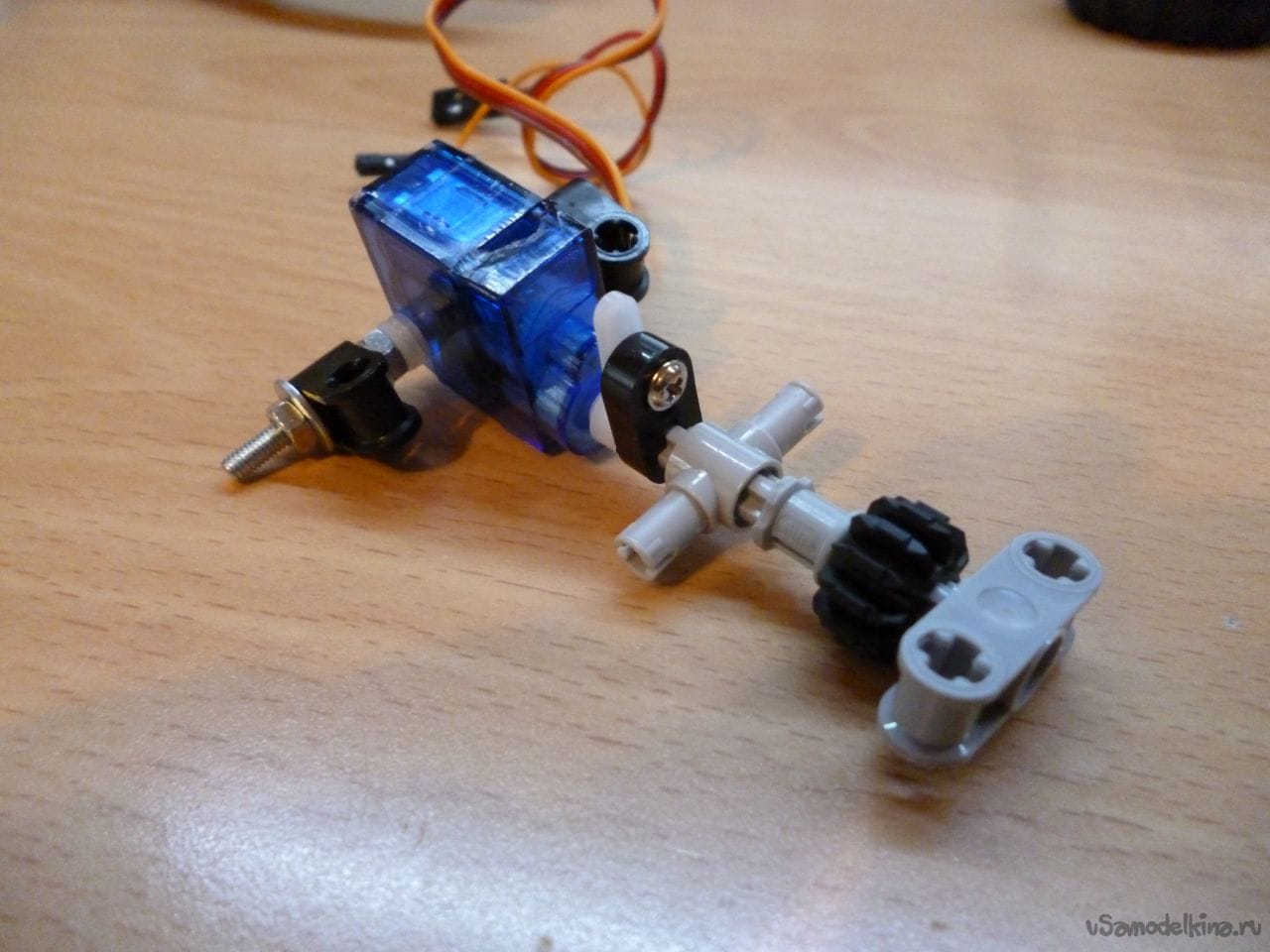
На вал сервопривода надеваем рычаг с прикрученной деталью от lego:
И наконец поворотный механизм в сборе:
Ставим на шасси:
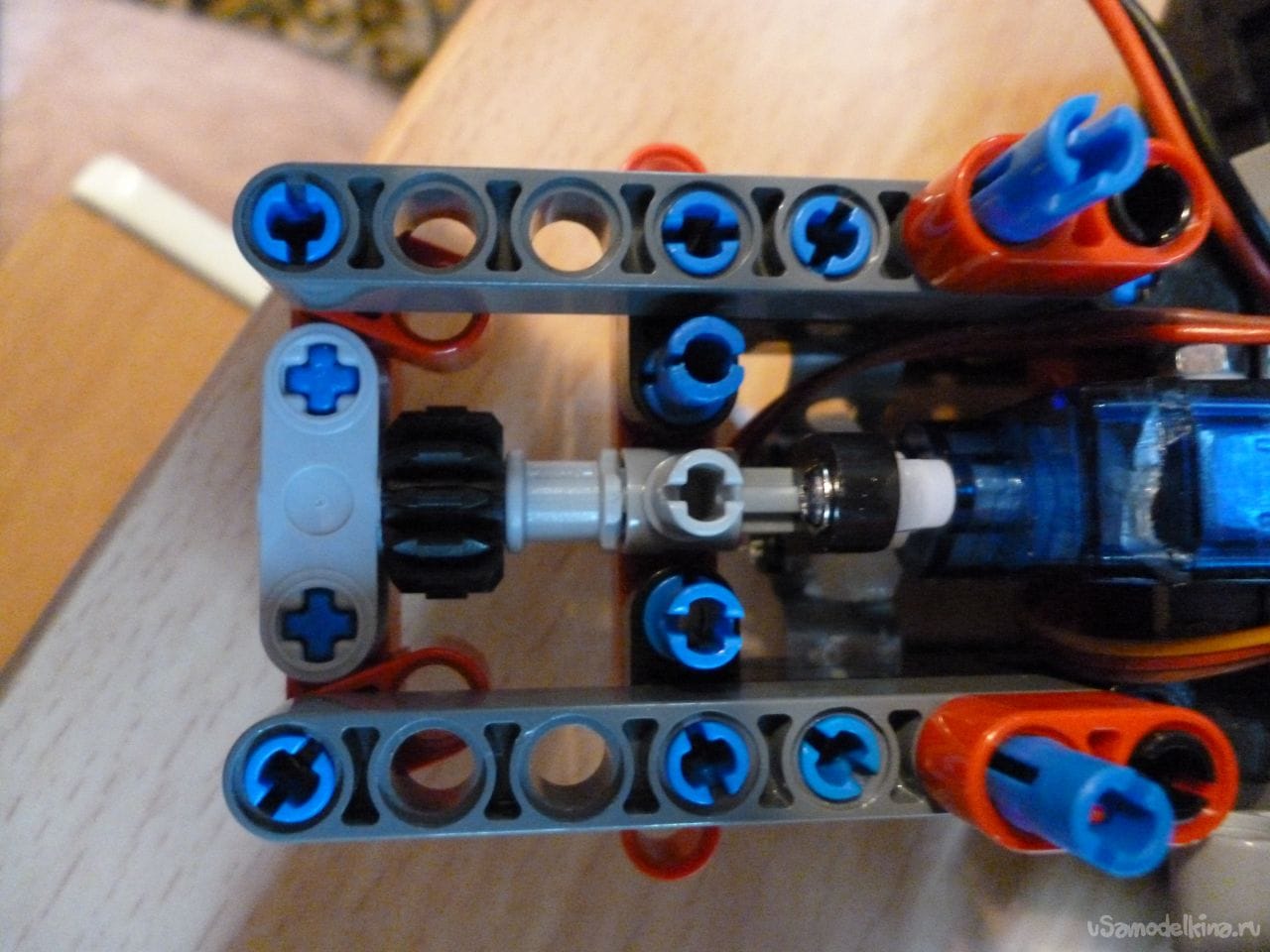
Надеваем колеса:
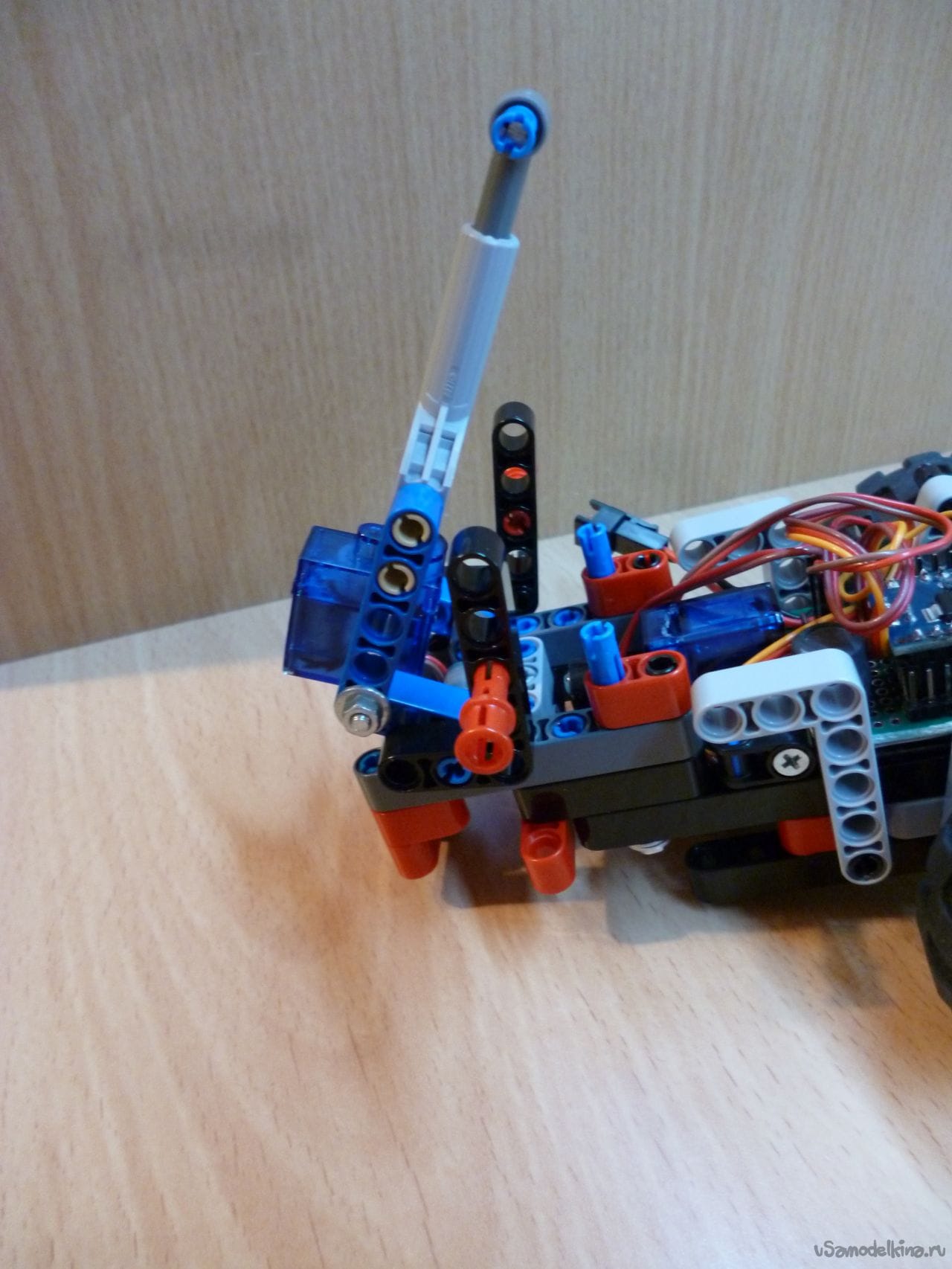
Шаг 3 подъемный механизм.
Для подъема ковша взял модифицированный сервопривод SG-90. Весь смысл его модификации в извлечение внутреннего контролера и припаивании проводов напрямую в моторчику, для того чтобы из сервопривода сделать мотор-редуктор, то есть чтобы он мог полностью крутится. Также как и в первом сервоприводе надо проделать сквозное отверстие для крепления:
Устанавливаем на шасси:

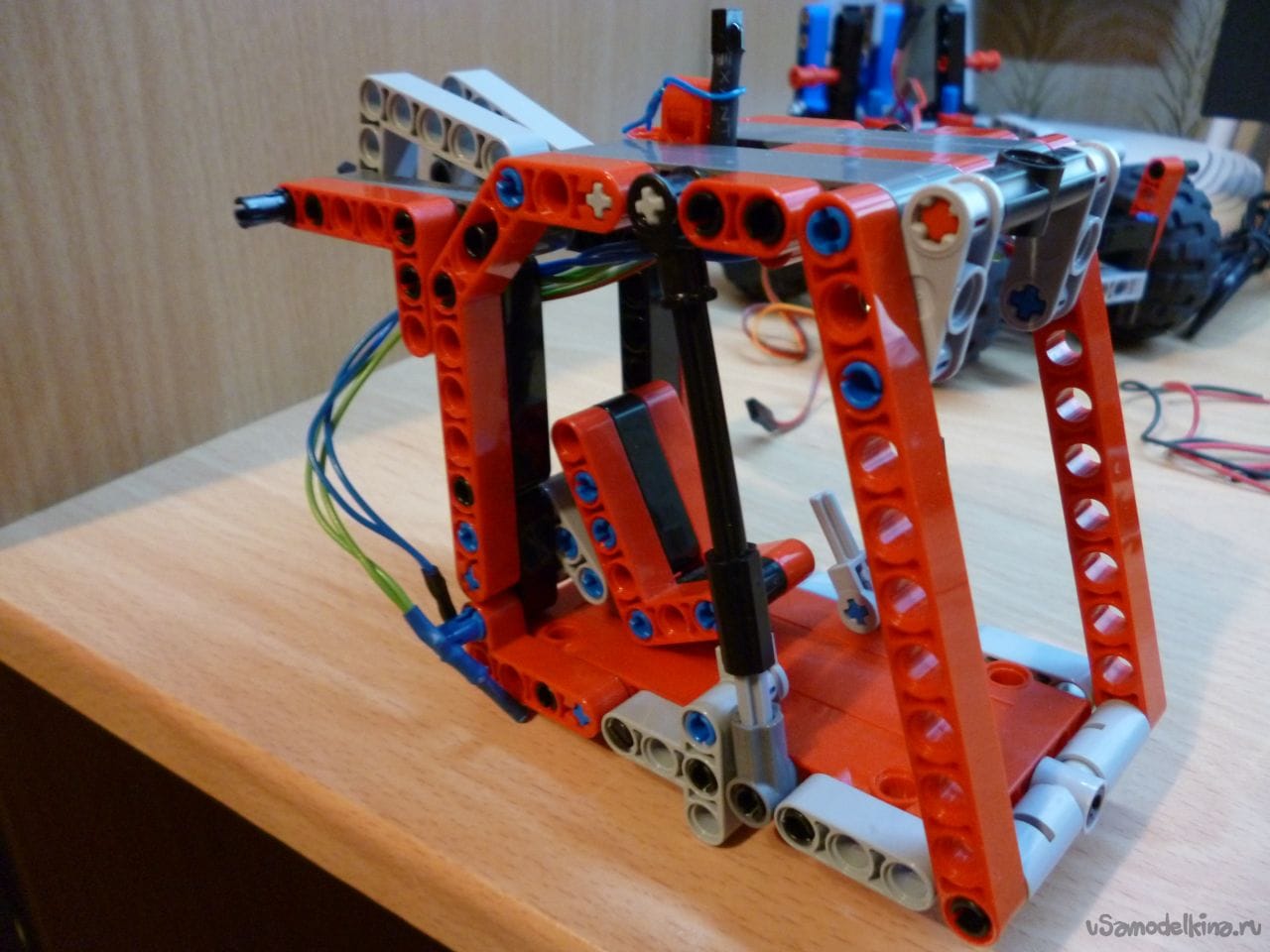
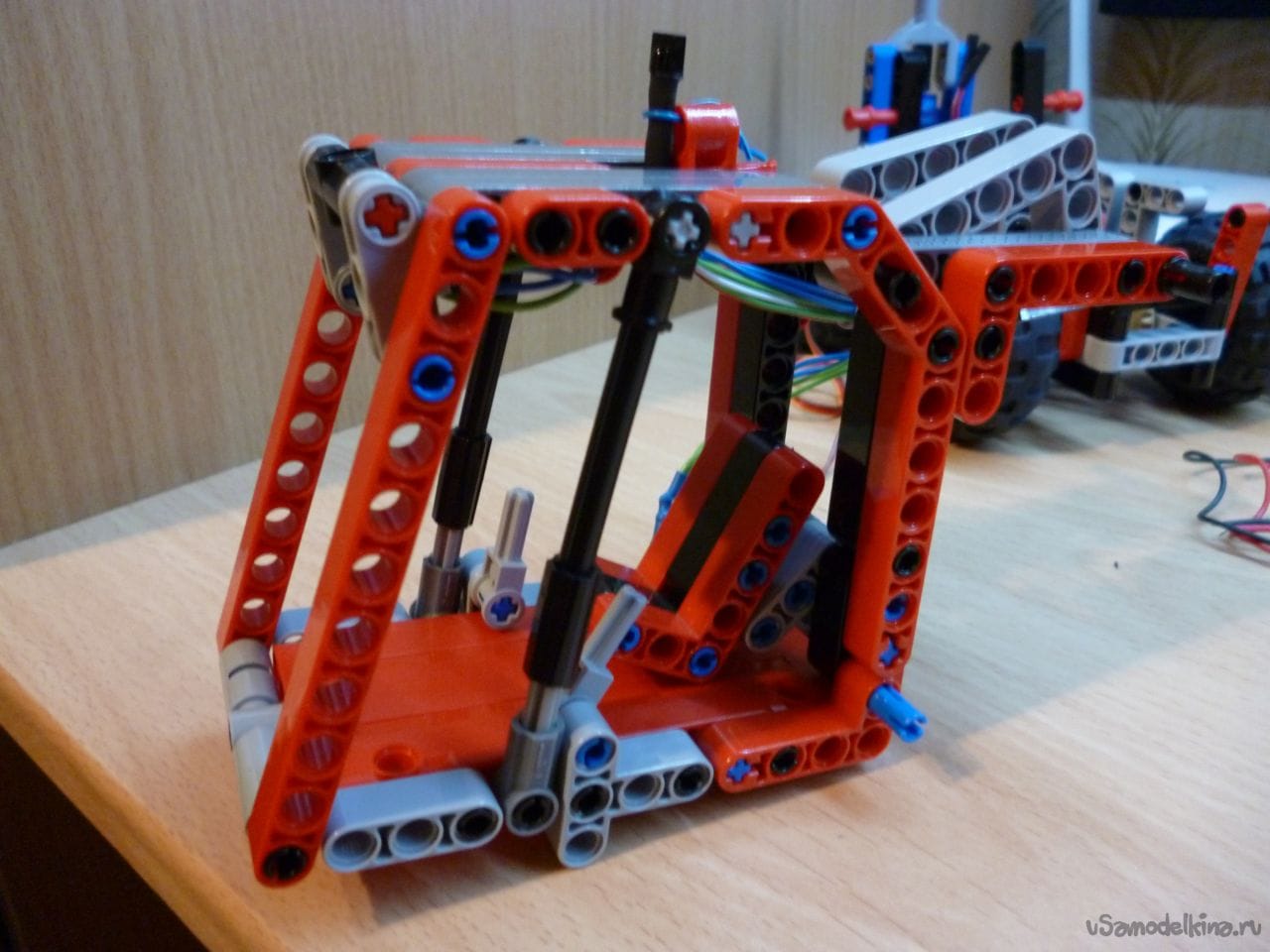
Шаг 4 кабина.
Нужно собрать кабину из lego technic по фотографиям:
Шаг 5 электрика.
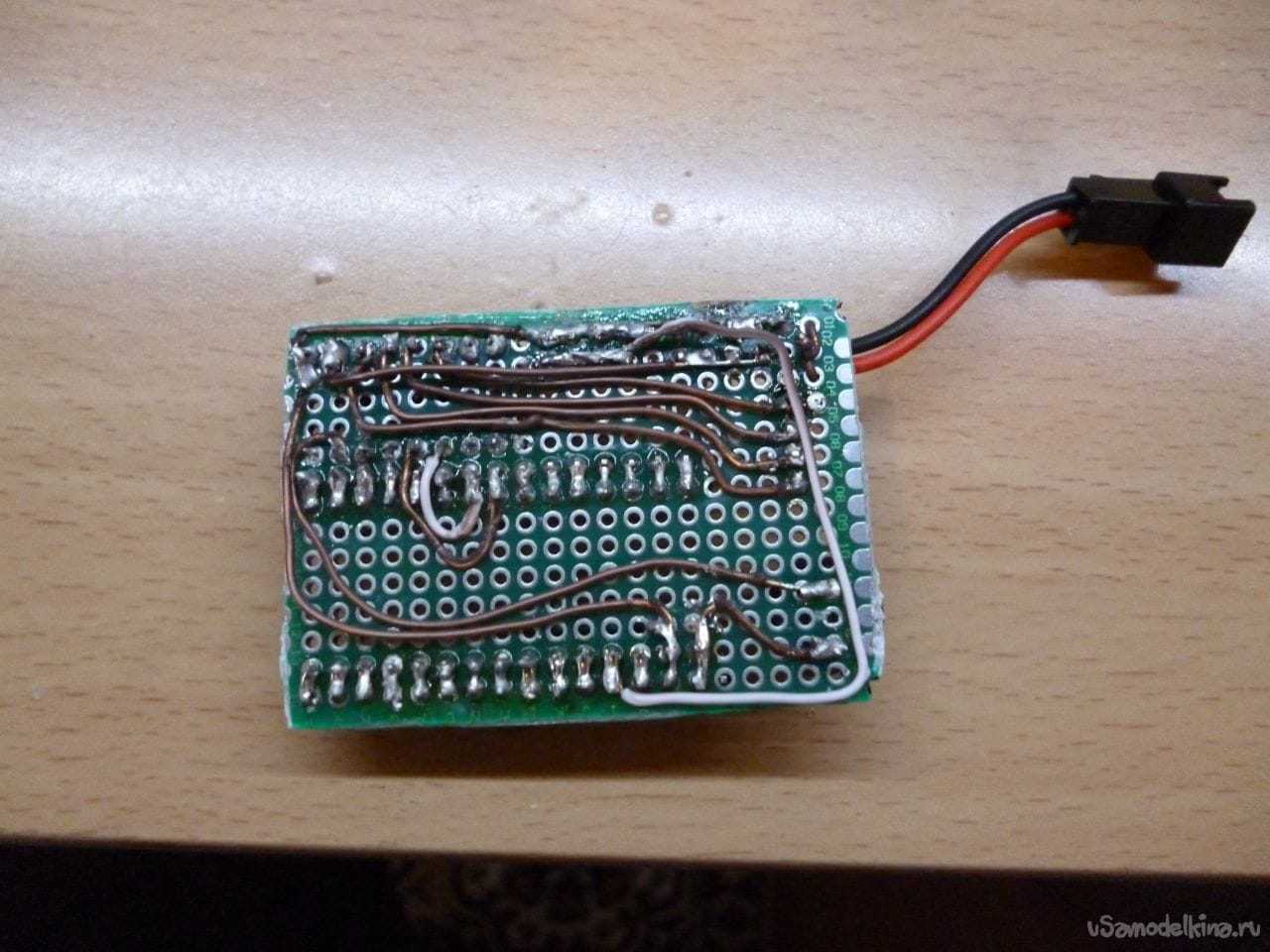
Здесь придется взяться за паяльник. Для удобства надо спаять все на монтажной плате по следующей схема:
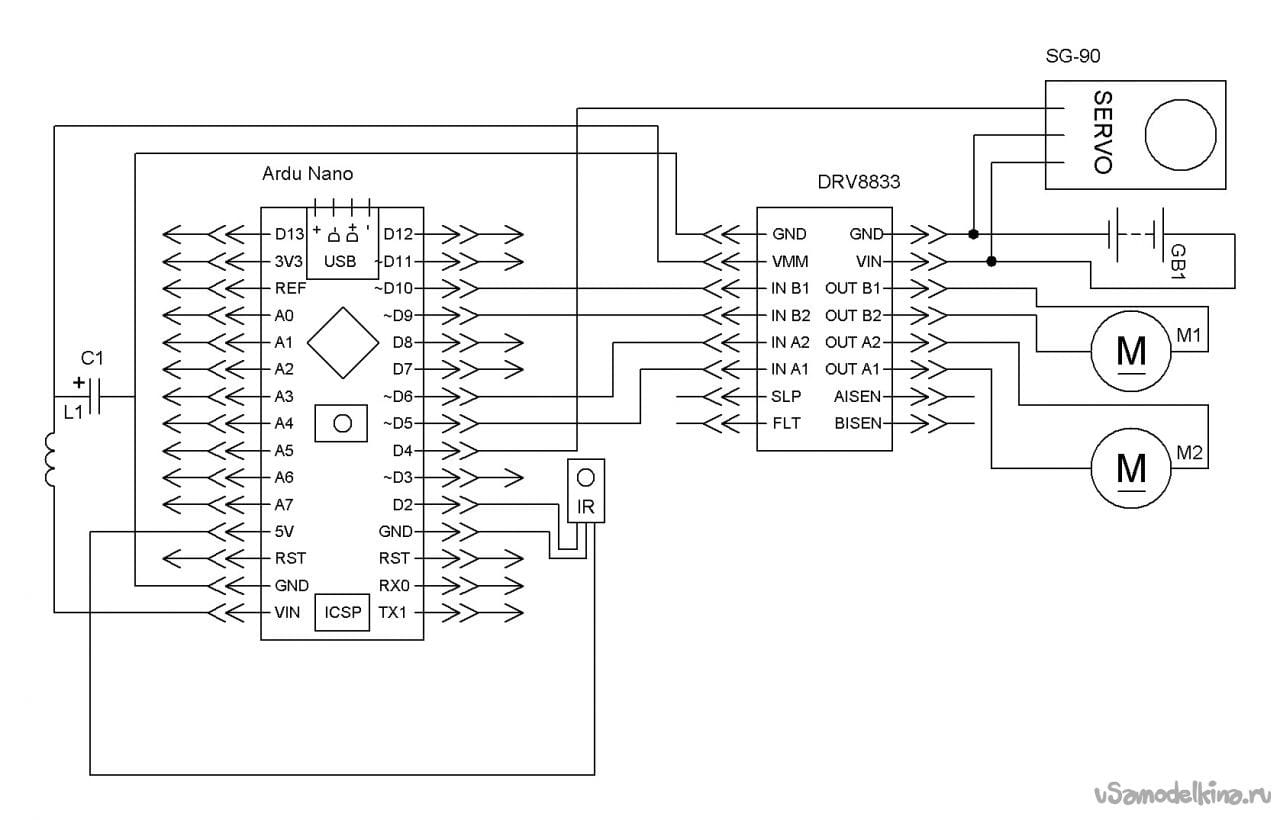
Думаю следует немного пояснить: конденсатор можно брать любой маломощный, катушка индуктивности тоже какую найдете, это нужно для стабилизации напряжения микроконтроллера. Резисторы подобрать нужно под используемые светодиоды. IR приемник я взял от старой игрушки, но его можно и купить в радиомагазине. Если будут сильные помехи, надо добавить конденсатор в цепь питания IR приемника.
У меня получилось это:
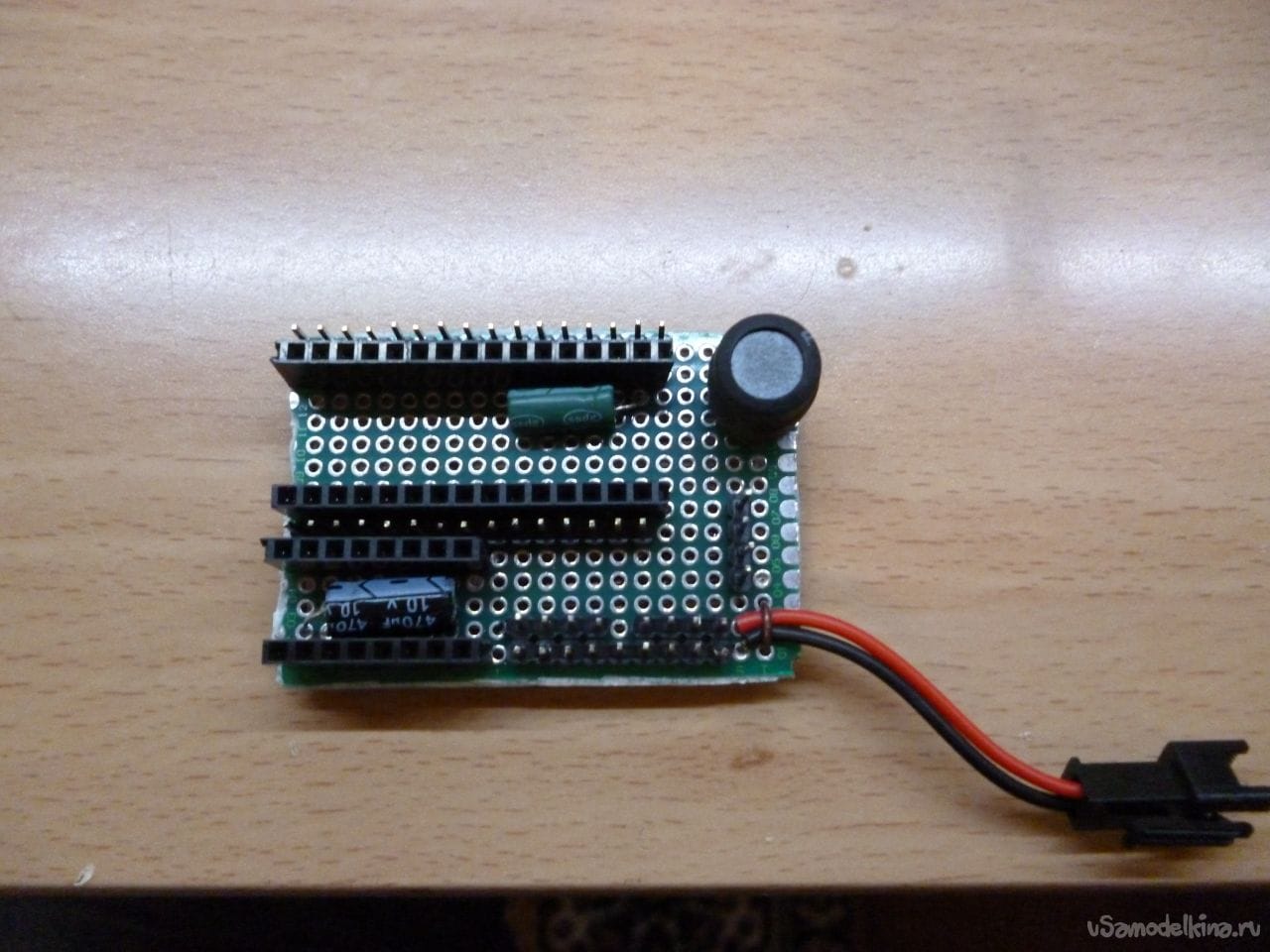
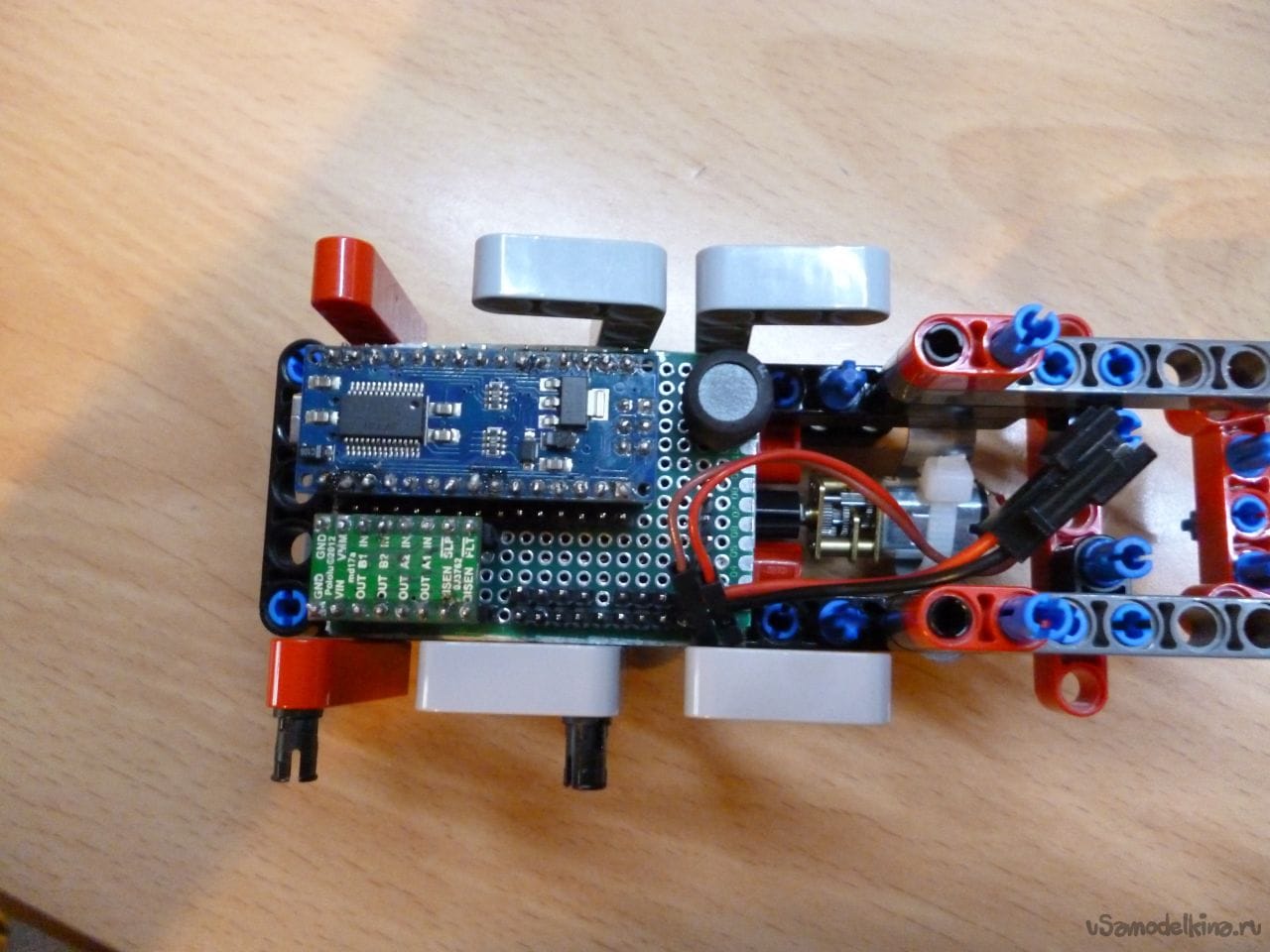
Устанавливаем Arduino Nano и DRV 8833 на свои места:

И теперь ставим плату на шасси (для удобства снял колеса):
Для питания использовал 4 аккумулятора Ni-Mn 1.2v 1000mA включенных последовательно и смотанных изолентой. Приклеил их на двусторонний скотч под задней крышкой кабины.
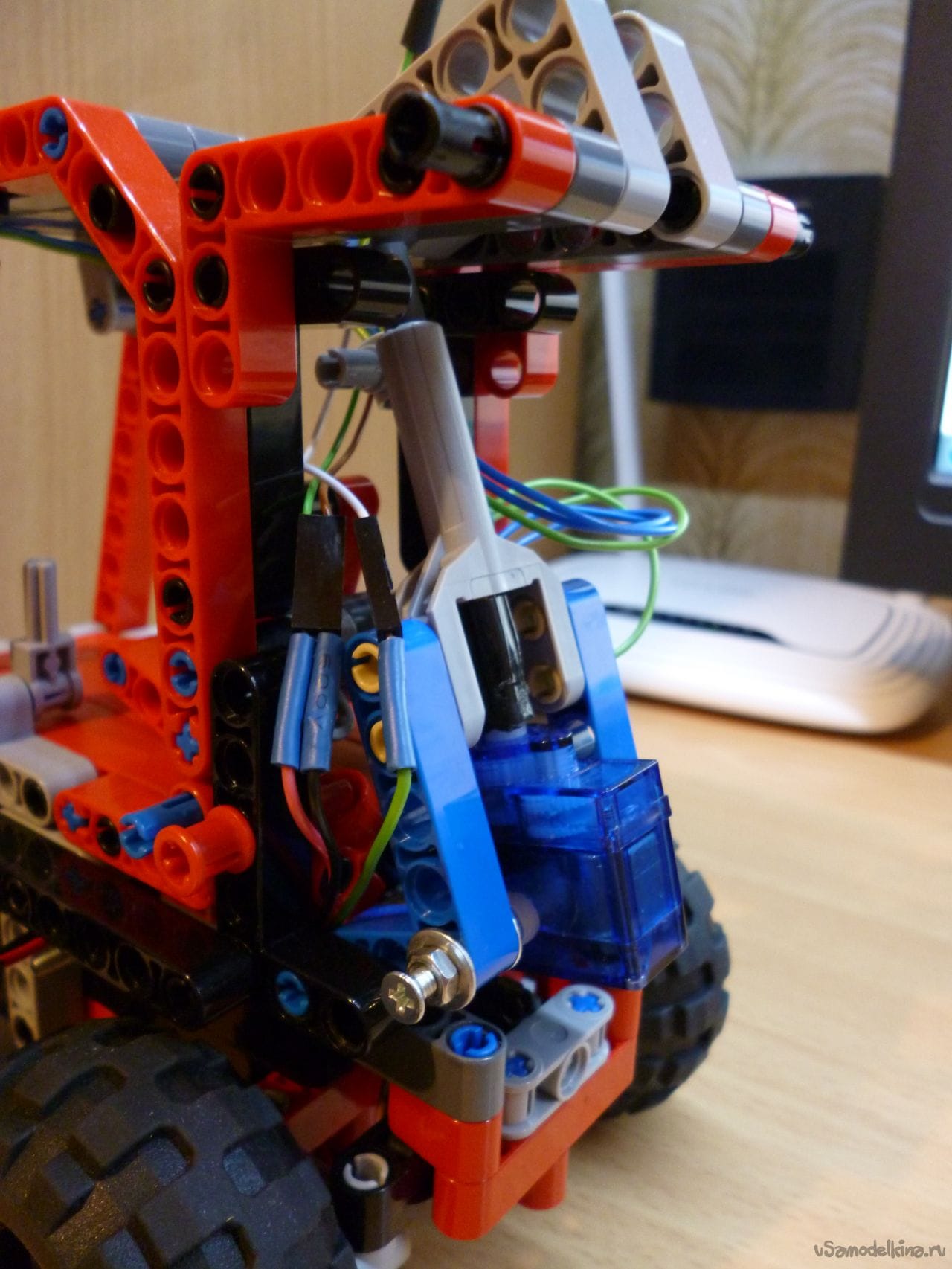
Шаг 6 установка кабины.
Подключаем IR приемник, моторы и диоды согласно схеме, ставим кабину сверху шасси, крепим ковш (ковш можно изготовить любой):

Шаг 7 прошивка.
Я программирую в среде Arduino IDE. Для начала надо залить мою прошивку и через терминал посмотреть коды пульта который вы собираетесь использовать. Можно взять любой IR пульт, например от телевизора или DVD проигрывателя. Нажимая кнопку в терминале мы увидим код нажатой кнопки, записываем его на бумажку. Проделываем так со всеми кнопками на которые хотим запрограммировать действия погрузчика. Далее надо править скетч. Записываем в него записанные нами коды на нужные действия и еще раз прошиваем.
Прошивка
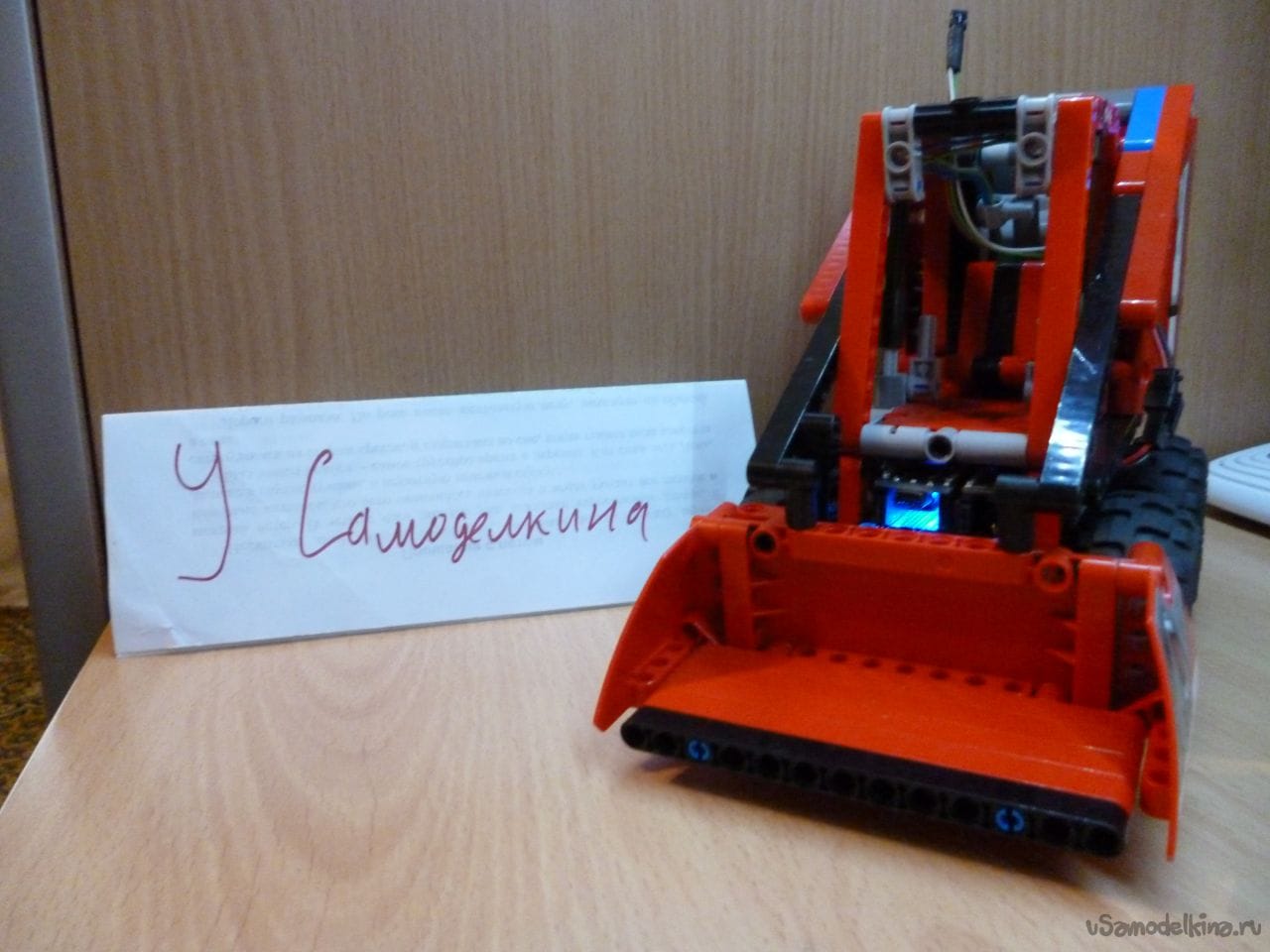
Видео погрузчика:
Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.

