


Мне все также интересна тема совмещения Arduino и Lego Technic. И сегодня я поделюсь инструкцией по изготовлению четырёхколёсного транспортного средства. Я назвал его «Марсоход» за необычную форму. За основу будет взята инструкция по сборке Lego Technic 42029, а дальше полет моей фантазии. Для управления будем использовать Bluetooth модуль, связанный с андроид устройством или компьютером.
Нам понадобится:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5v AT Mega 328
- Драйвер двигателя L9110S
- 1 сервопривода SG-90
- Bluetooth модуль HC-05 или аналог
- USB-UART для прошивки arduino
- Мотор редуктор 6v 1:150 100 об/мин
- 2 светодиода
- 2 резистора 150 Ом
- Конденсатор 10v 1000uF
- 2 однорядных гребенки PLS-40
- Катушка индуктивности 68мкГн
- 2 аккумулятора Li-ion 18650
- Коннектор папа-мама двух контактный на провод
- Хомутик
- Провода разных цветов
- Припой
- Канифоль
- Паяльник
- Болтики 3х20, гайки и шайбы к ним
- Болтики 3х40
- Болтики 3х60
- Канцелярский или просто острый нож
Шаг 1 Подготовка механической части.
Мотор-редуктор 6v 1:150 100 об/мин необходим для нашей модели и приводит в движение заднюю ось. Вы можете поэкспериментировать и попробовать другое передаточное число. 100 об/мин на мой взгляд оптимальное. Мотор-редуктор не предусмотрен для соединения с деталями Lego. Поэтому его надо немного переделать. Острым или канцелярски ножом необходимо придать форму креста выходным валам редуктора. По размерам крест должен совпадать с обычной крестовой осью Lego.

Для осуществления поворота колес будем использовать сервопривода SG-90. Он также не предусмотрен для соединения с Lego деталями. Чтобы закрепить его на нашей модели надо аккуратно просверлить, так чтобы не задеть внутренние части сервопривода, сквозное отверстие диаметром 3.2 мм или просто вырезать канцелярским ножом. В это отверстие мы будем вставлять болтик для соединения с Lego. А также отрезать выступающие части («крылья» для крепления):

На вал сервопривода надеваем рычаг с прикрученной деталью от lego:

Шаг 2 Сборка корпуса
Для сборки корпуса нам нужна инструкция Lego 42029. Ее легко можно скачать с официального сайта Lego.
Необходимо скачать и первую и вторую части.
Основу заднего моста собираем по инструкции Lego 42029 часть 1, начиная с 3 страницы по 8 включительно. Немного добавляем для крепления пружин:
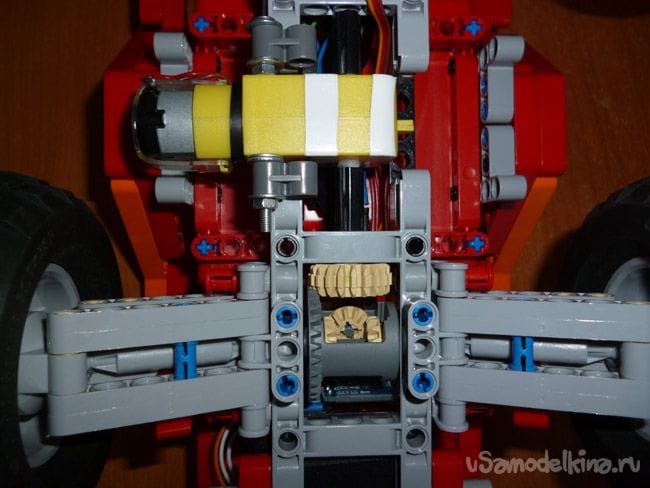
На подрезанную ось мотор-редуктора надеваем соединительную втулку Lego. Сам редуктор крепим болтом 3х60 мм как показано на фото:
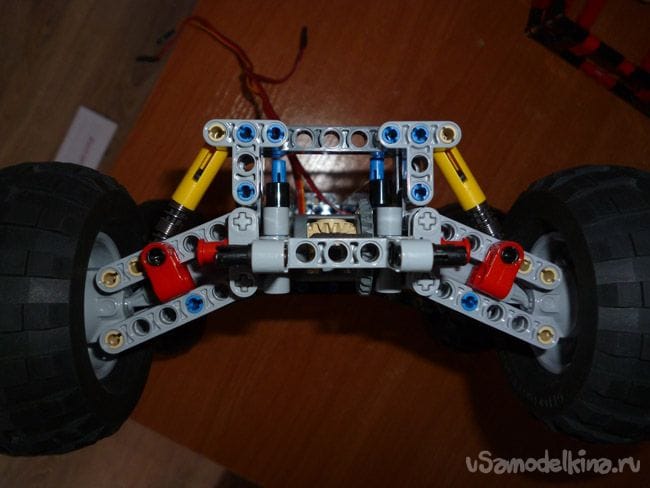
Переходим к передней части. Переднюю часть подвески собираем по инструкции Lego 42029 часть 1, с 21 страницы по 23. Трапецию берем из второй части Lego инструкции с 6 страницы по 11. Добавляем деталей спереди как показано на фото:
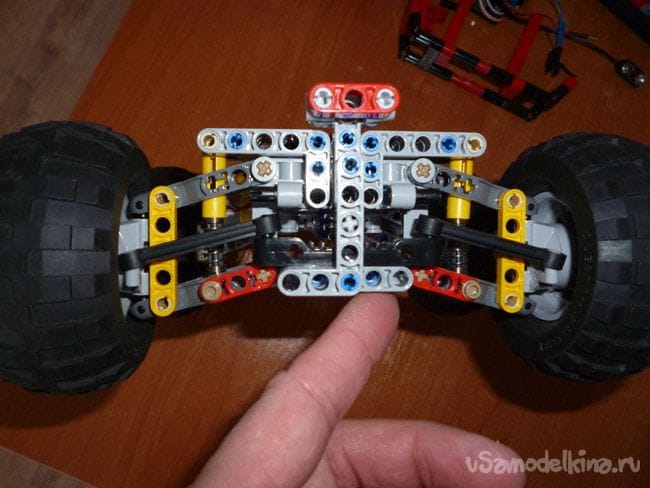
Сооружаем передний бампер как показано на фото:

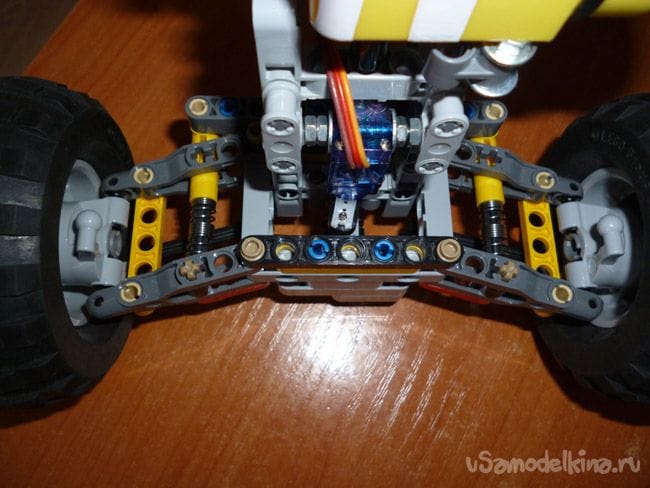
Сервопривод крепим примерно посередине машины, и соединяем валом с шестеренкой, осуществляющей поворот колес:

Соединяем обе части вместе. Снизу все должно выглядеть так:

Кабину необходимо собрать по фотографиям:


Добавим светодиодов как фары:

Ставим кабину сверху переднего моста. Сзади собираем бампер и крепим пластину:

Осталось собрать среднюю платформу, тоже по фото:


Ставим ее на место:


На этом сборка корпуса закончена.
Шаг 3 Электрика.
Для питания моторчиков и Bluetooth модуля будем использовать два аккумулятора Li-ion 18650 спаянных параллельно. Также для удобства подключения стоит припаять к ним соединительный коннектор:

Для питания Arduino проще всего использовать отдельное питание, например, 9 вольтовою крону. Если нет желания впихивать еще и батарейку туда, можно запитать Arduino от тех же аккумуляторов, но при этом необходимо в разрыв плюсового провода питания Arduino вставить катушка индуктивности 68мкГн, а также подключить конденсатор 10v 1000uF на туже линию питания. Управляющий провод сервопривода подключаем к pin 2, а драйвер двигателя к pin 5 и 6:
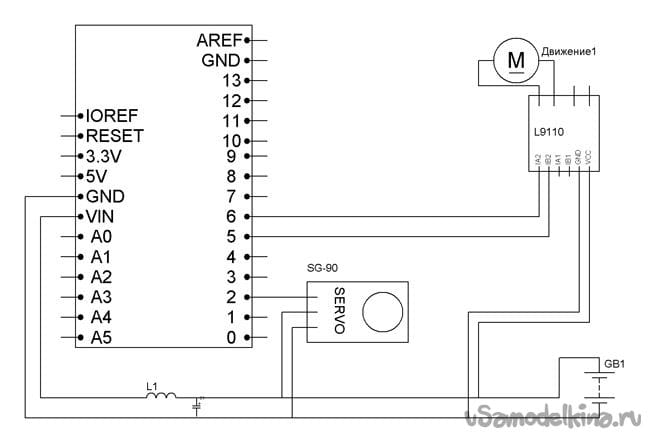
Также можно подключить фары. Для этого подключаем через резисторы аноды двух светодиодов к 4 pin Arduino, катоды к GND. Резисторы подбираются под используемые светодиоды.
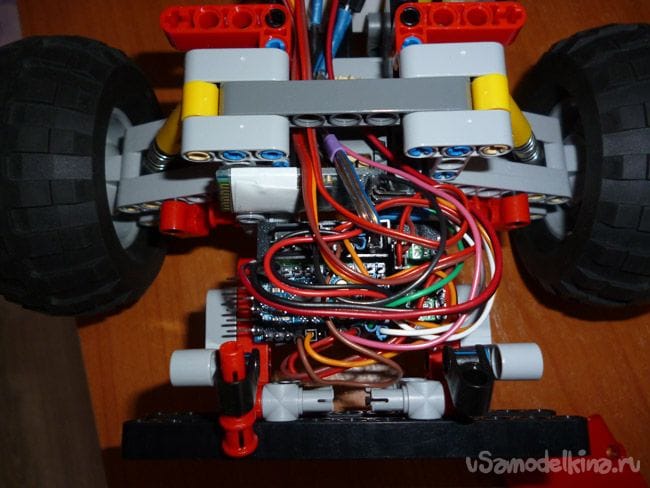
Вся собранная электрика занимает не очень много места:

Размещаем ее в задней части "марсохода", под большой пластиной:
Шаг 4 Подготовка среды программирования.
Для написания скетча будем использовать Arduino IDE. Версия должна быть не ниже чем 1.8. Скачиваем Arduino IDE с официального сайта.
Далее необходимо добавить в Arduino IDE библиотеки. В данном проекте используется две библиотеки Servo.h (для управления сервоприводом) и SoftwareSerial.h (для связи с Bluetooth модулем):
Вам необходимо их скачать и установить. Сделать это можно распаковав архивы и переместив все файлы в папку «libraries», находящуюся в папке с установленной Arduino IDE. Или можно воспользоваться другим способом - не распаковывая скачанные архивы, выбрать в среде Arduino IDE меню Скетч – Подключить библиотеку. В верху выпадающего списка выбрать пункт «Добавить .Zip библиотеку». И указать место нахождения скачанных архивов. После установки библиотек обязательно перезагрузить Arduino IDE.
Шаг 5 Настройка Bluetooth модуля.
Самыми распространёнными на сегодняшний день Bluetooth модулями являются HC-05 и HC-06. Они в изобилии присутствуют как в Китайских онлайн-магазинах, так и среди российских импортеров. HC-05 может работать как в режиме ведущего (master), так и в режиме ведомого (slave). HC-06 является только ведомым устройством. Иначе говоря, HC-06 не может сам обнаружить парное устройство и наладить с ним связь, он может быть только ведомым.
Как правило модули продаются в виде двух спаянных вместе плат. Меньшая из них — заводской модуль, широко используемый в разных электронных устройствах. Большая — специальная макетная платка для DIY проектов. Так выглядит меньшая плата с чипом BC417:

А так сами DIY модули HC-05 и HC-06:
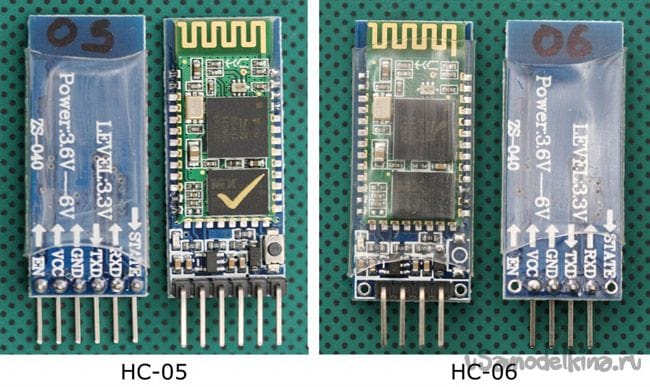
Вы можно использовать любой понравившийся вам модуль. Модуль без макетной платы стоит дешевле, но тогда придется позаботиться о питании 3.3 V для модуля и помучится, припаивая к модулю провода. Я выбрал оптимальный, на мой взгляд, в соотношении цена\функционал HC-05. Каждый раз при прошивке отключать Bluetooth модуль от Arduino, на мой взгляд, неудобно, поэтому для связи мы будем использовать программный порт. Сделать это возможно благодаря библиотеке SoftwareSerial.
Соединяем следующим образом:
Arduino Pro Mini - Bluetooth
D7 – RX
D8 – TX
5V – VCC
GND –GND
Для правильной работы модуль надо настроить. Настройка производится путем ввода AT команд в окне терминала. Я буду настраивать модуль HC-05. Если у вас будет другой настройки могут отличатся. Для связи компьютера и Bluetooth модуля необходимо залить в Arduino следующий скетч. При этом Arduino будет выступать в роль связующего звена между Bluetooth модулем и компьютером:
После заливки скетча открываем окно терминала, ставим скорость 9600, и вводим следующие команды:
«AT» (без кавычек) должен прийти ответ «OK» (значит всю подключено верно и модуль работает)
«AT+BAUD96000» (без кавычек) должен прийти ответ «OK9600».
Если пришел нужный ответ, переходим к следующему шагу.
Шаг 5 Заливка скетча в Arduino.
Следующим шагом необходимо скачать и залит в Arduino следующий скетч:
Шаг 6 Настройка телефона.
Для Android телефона нам понадобится установить программу управления роботом через Bluetooth. Их много, различаются внешним видом и функционалом. Нужно ввести в Google play «Bluetooth Arduino» и выбрать ту, которая вам понравится. Я рекомендую BT Controller. Она бесплатная, а функционала достаточно чтобы управлять нашей машинкой. Скачиваем и устанавливаем на любое Android устройство. Далее, через настройки Android устройства, необходимо установить соединение с нашим модулем. Пароль для соединения «1234» или «0000». Затем провести настройку программы на соответствующие команды. Список приведен ниже.
Шаг 7 Настройка Windows (при необходимости)
Для любителей пользоваться настольным компьютером, ноутбуком или windows устройством есть программа, позволяющая отправлять команды по Bluetooth каналу. Для этого на этом устройстве должен быть Bluetooth. Устанавливаем связь с нашим модулем, через средства управления устройством. Пароль для подключения такой же «1234» или «0000». Можно пользоваться терминалом для отправки команд. Любым удобным для вас. Записав прошивку, управление производится следующими кнопками (командами):
W – вперед
S – назад
A – влево
D – вправо
F – стоп
G – руль прямо
K – включение фар
L – выключение фар
Пользоваться терминалом для управления не очень удобно. Поэтому я рекомендую Z-Controller. В программе нужно выбрать порт (com порт через который происходит соединение) и настроить клавиши на соответствующие команды. Настройка простоя и интуитивная. Я выкладываю саму программу и настройки для нашего «марсохода»:

Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.


