


Часть своей конструкции я взял из инструкции по сборке Lego Technic 42049. Остальное моя импровизация. Для управления я буду использовать Bluetooth модуль связанны с андроид устройством или компьютером.
Итак, нам понадобится:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5v AT Mega 328
- 2 Драйвера двигателя L9110S
- 1 сервопривода SG-90
- Bluetooth модуль HC-05 или аналог
- USB-UART для прошивки arduino
- Мини мотор-редуктор 50 об/мин
- Мини мотор редуктор 100 об/мин
- Мотор редуктор 6v 150 об/мин
- 2 светодиода
- 2 резистора 150 Ом
- Конденсатор 10v 1000uF
- 2 однорядных гребенки PLS-40
- Катушка индуктивности 68мкГн
- 6 NI-Mn аккумулятора 1.2v 1000mA
- Коннектор папа-мама двух контактный на провод
- Хомутик
- Провода разных цветов
- Припой
- Канифоль
- Паяльник
- Болтики 3х20, гайки и шайбы к ним
- Болтики 3х40
- Болтики 3х60
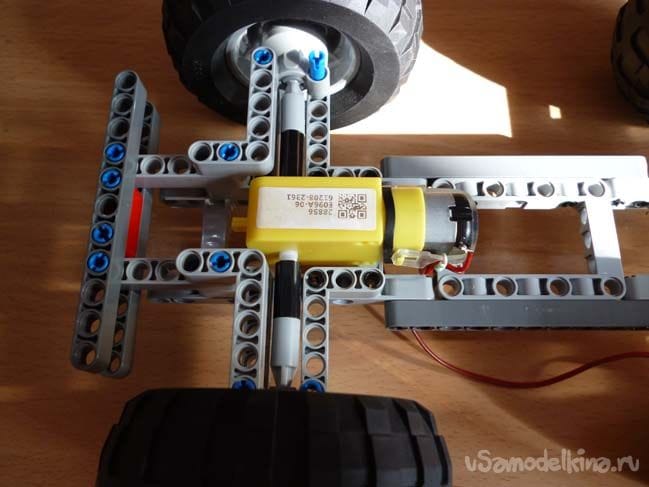
Шаг 1 Сборка заднего моста
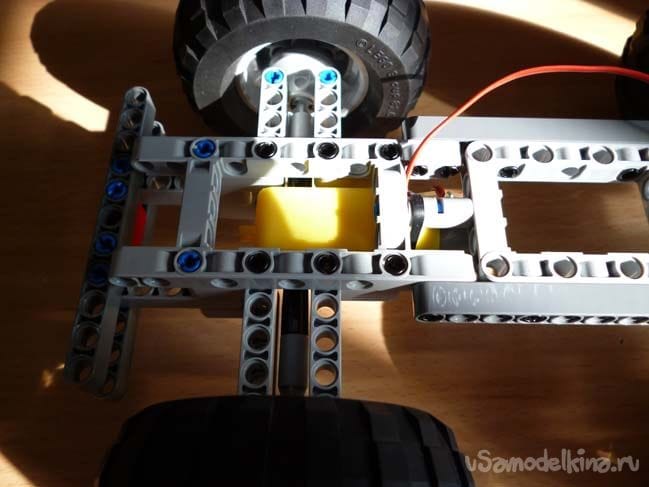
Для движения будем использовать мотор редуктор с 6 вольтовым моторчиком со скоростью 150 об/мин. Ось редуктора с двух сторон надо подрезать и надеть детали lego. Задний мост собирается следующим образом:
И с обратной стороны:
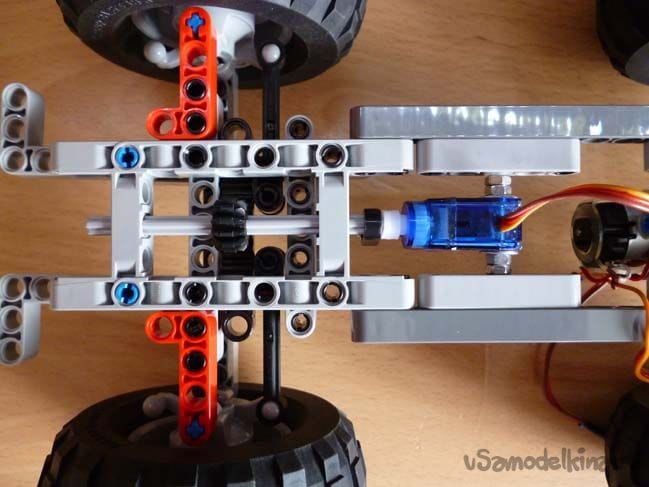
Шаг 2 Сборка переднего моста
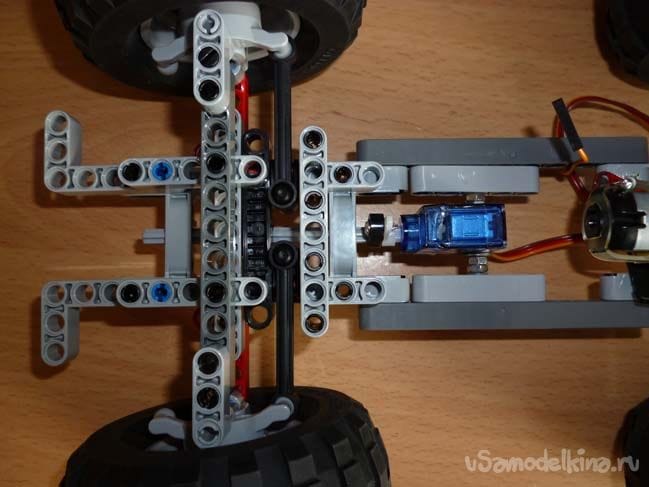
Для осуществления поворота колес хорошо подходит сервопривода SG-90. Чтобы закрепить его на нашей модели надо аккуратно просверлить, так чтобы не задеть внутренние части сервопривода, сквозное отверстие диаметром 3.2 мм или просто вырезать канцелярским ножом. А также отрезать выступающие части («крылья» для крепления). Вставляем болтик в проделанное отверстие и фиксируем гайками. На вал сервопривода надеваем рычаг с прикрученной деталью от lego:

И с обратной стороны:
Шаг 3 Сборка основы и кабины
Соединяем оба моста как показано на фото:

Собираем кабину( нужна для красоты):

Ставим кабину на основу:


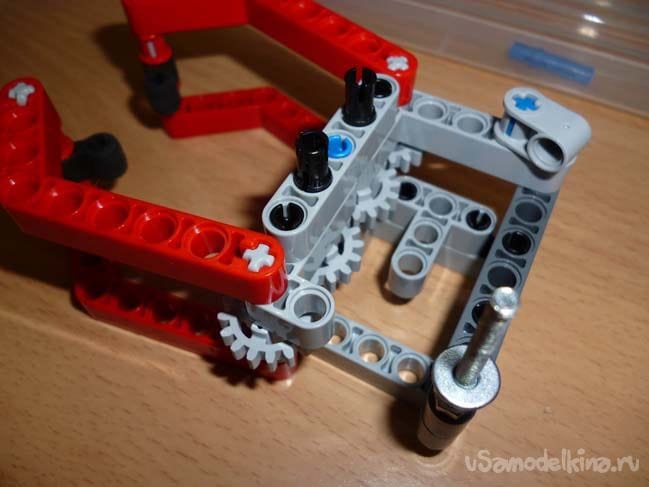
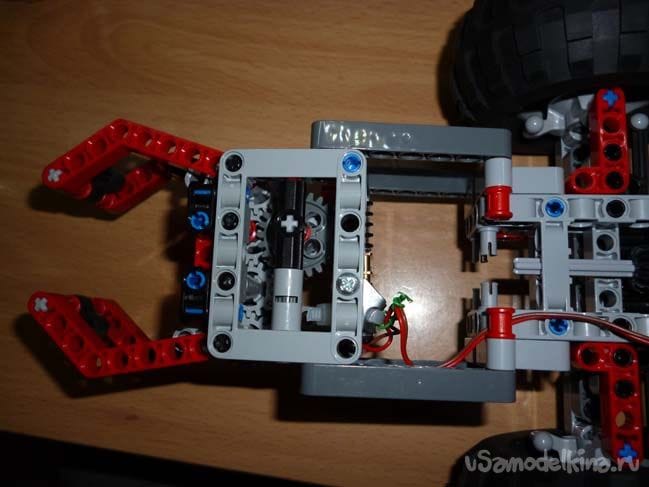
Шаг 4 Собираем захват или клешню
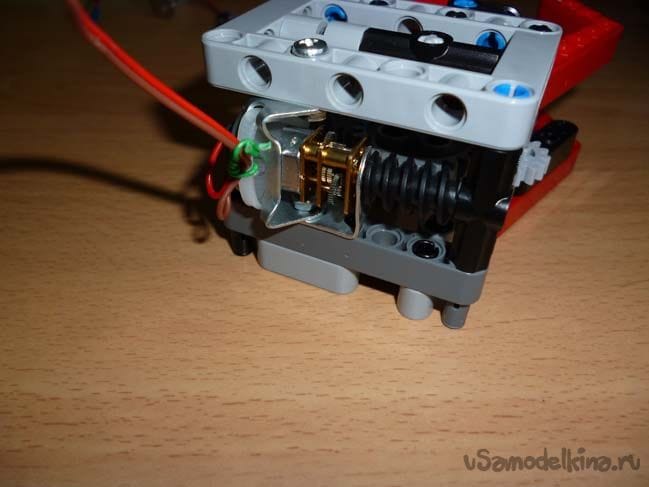
Клешня приводится в движение мини мотор редуктором со скоростью 50 об/мин. Проблему соединения мотор редуктора с деталями конструктора я решил следующим образом: надел на ось мотор редуктора соединительную втулку и вставил обрезок спички для фиксации. Для крепления мотор редуктора использовал металлическую пластику от железного конструктора и хомутик. Получилось следующее:

Далее собираем собственно клешню по фото:


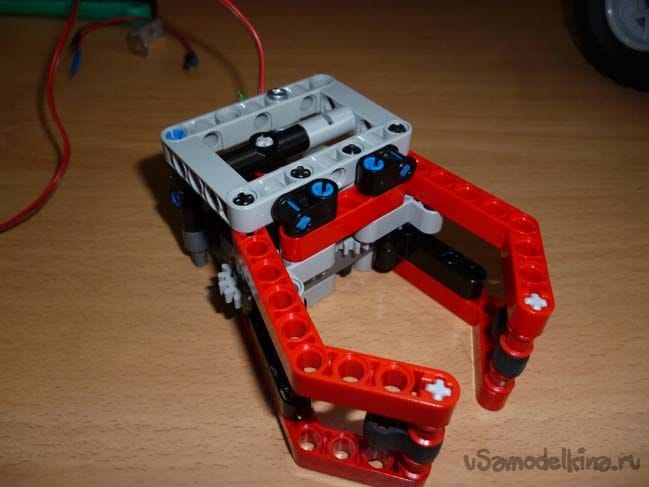
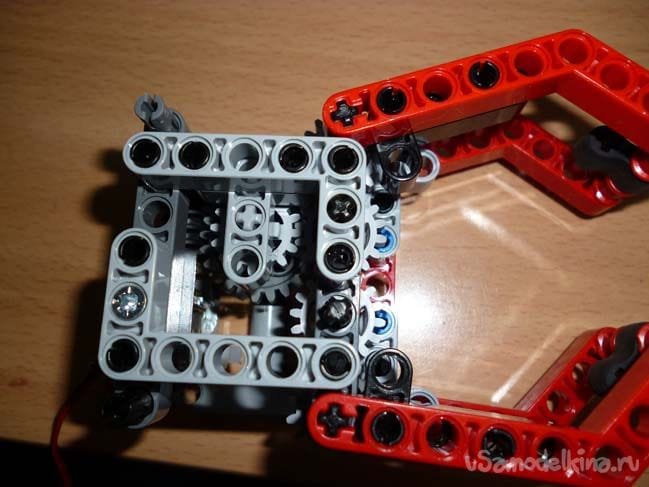
Крепим ее на основу:

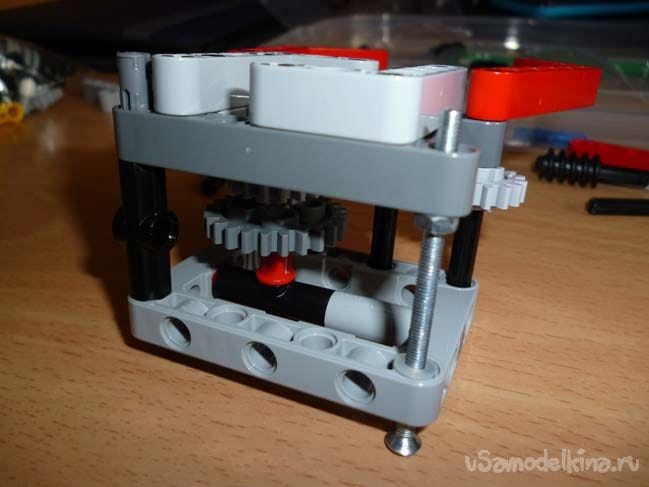
Для подъема клешни подходит мини мотор редуктор со скоростью 100 об/мин:


Шаг 5 Электрика
Для управления будем использовать Arduino Pro Mini и Bluetooth модуль. Драйверы двигателя нужны для подключения моторчиков.
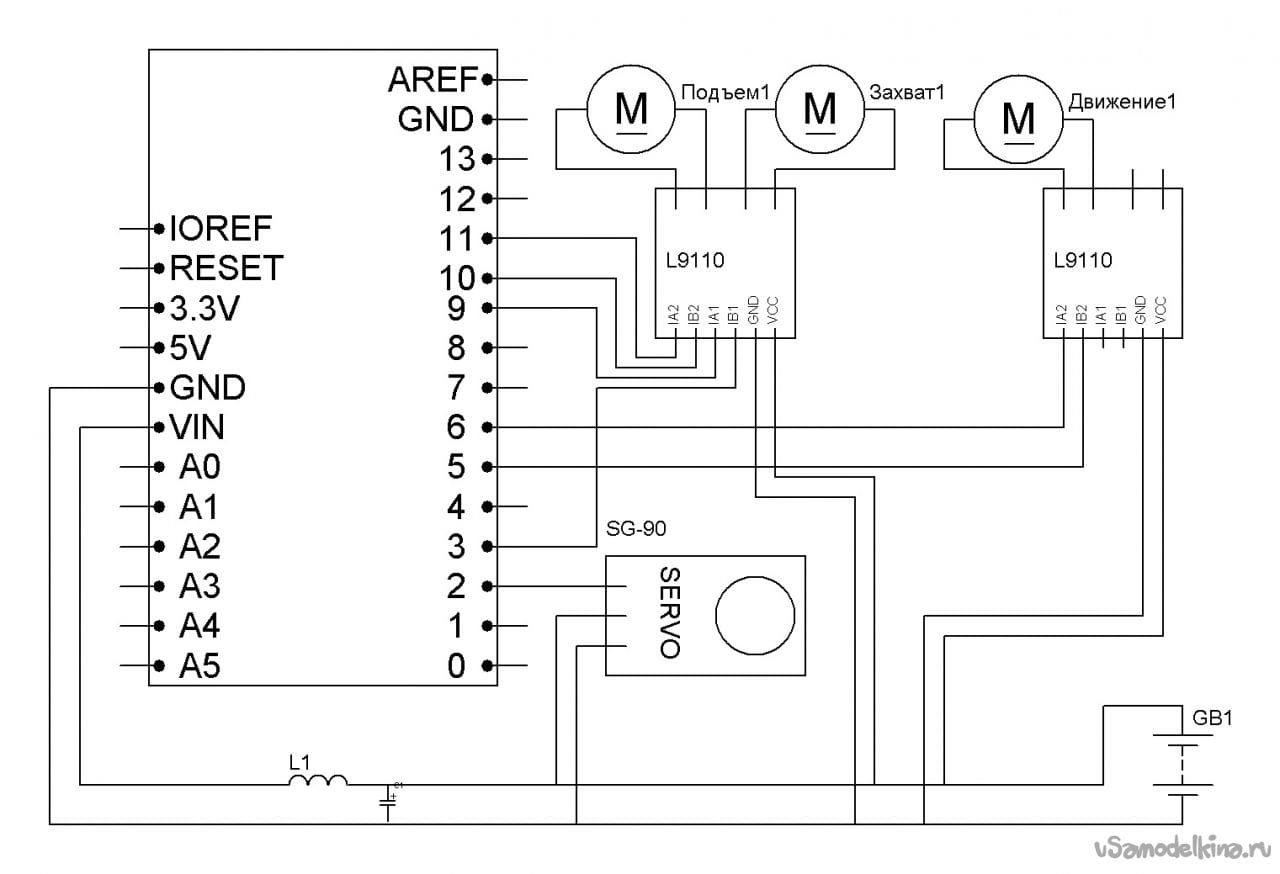
Соединение всех компонентов проводами «мама-мама» Dupont. Питание – 6 NI-Mn аккумулятора 1.2v 1000mA спаянных последовательно. Конденсатор любой маломощный, катушка индуктивности тоже какую найдете, нужно для стабилизации питания микроконтроллера. Аноды двух светодиодов подключаем к 4 pin ардуино, катоды к GND. Резисторы подбираются под используемые светодиоды. Для удобства аккумуляторы сматываем изолентой.

Клеим это все на двусторонний скотч на основу:

Шаг 6 Настройка Bluetooth
Самыми доступными на сегодня Bluetooth модулями можно назвать HC-05 и HC-06. Они в изобилии присутствуют в Китайских онлайн-магазинах. Отличия между ними в том, что первый может работать как в режиме ведущего (slave), так и в режиме ведомого (master). Второй же является чисто ведомым устройством. Другими словами, HC-06 не может сам обнаружить парное устройство и наладить с ним связь, он может лишь подчиниться ведущему.
Краткие характеристики модулей:
- чип Bluetooth – BC417143 производства
- протокол связи – Bluetooth Specification v2.0+EDR;
- радиус действия – до 10 метров (уровень мощности 2);
- совместимость со всеми Bluetooth-адаптерами, которые поддерживают SPP;
- объем flash-памяти (для хранения прошивки и настроек) – 8 Мбит;
- частота радиосигнала – 2.40 .. 2.48 ГГц;
- хост-интерфейс – USB 1.1/2.0 или UART;
- энергопотребление – ток в течение связи составляет 30-40 мА. Среднее значение тока около 25 мА. После установки связи потребляемый ток 8 мА Режим сна отсутствует.
Обычно модули продаются в виде двух спаянных вместе плат. Меньшая из них — заводской модуль, широко используемый в разных электронных устройствах. Большая — специальная макетная платка для DIY. Так выглядит меньшая плата с чипом BC417:

А так сами DIY модули HC-05 и HC-06:
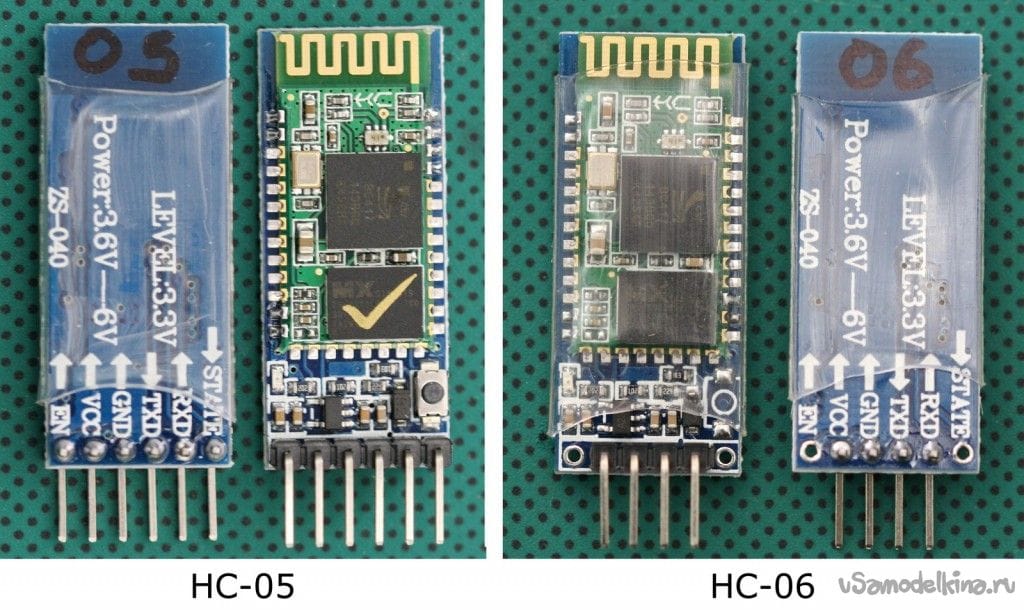
В принципе можно использовать любой понравившийся вам модуль. Модуль без макетной платы стоит дешевле, но тогда придется позаботиться о питании 3.3 V для модуля и помучится, припаивая к модулю провода. Я выбрал оптимальный, на мой взгляд, в соотношении цена\функционал HC-06.
Соединяем следующим образом:
Arduino Pro Mini - Bluetooth
D7 – RX
D8 – TX
5V – VCC
GND –GND
Для правильной работы модуль надо настроить. Настройку будем производить AT командами вводимыми в окно терминала. Я привожу пример настройки модуля HC-05. Если у вас будет другой настройки могут отличатся. Чтобы наш модуль получал команды, вначале прошиваем Arduino следующей прошивкой:
В данном случаем Arduino выступаем в роли моста между компьютеров и модулем. В прошивке я использую библиотеку SoftwareSerial. На высоких скоростях она работает нестабильно. Если хотите высокой скорости, можно подключить модуль напрямую к RX и TX контактам Arduino и переписать прошивку. Но в моем случае мы будем работать с модулем на скорости 9600. Итак после прошивки, открываем терминал и вводим:
«AT» (без кавычек) должен прийти ответ «OK» (значит всю подключено верно и модуль работает)
«AT+BAUD96000» (без кавычек) должен прийти ответ «OK9600».
Если пришел нужный ответ, переходим к следующему шагу.
Шаг 7 Прошивка
Для написания прошивки и собственно прошивки я пользуюсь Arduino IDE. Актуальная версия на сегодняшний день 1.8. Собственно прошивка:
Шаг 8 Настройка телефона.
На Android телефон надо установить программу для управления роботом через Bluetooth. Их достаточно много. Можно ввести в Google play «Bluetooth Arduino» и выбрать на свой вкус. Мне понравилась BT Controller. Скачиваем и устанавливаем на телефон или планшет на Android. Далее, через настройки Android, надо установить соединение с нашим модулем. Пароль для соединения «1234» или «0000». Далее провести настройку программы на соответствующие команды. Список приведен ниже.
Шаг 9 Настройка компьютера (если надо)
При необходимости или просто удобства для управления можно использовать компьютер или ноутбук. Для этого на компьютере должен быть Bluetooth. Устанавливаем связь с нашим модулем, через средства управления на компьютере. Далее нам нужен терминал для отправки команд. Любой удобный для вас. Записав прошивку, управление производится следующими кнопками (командами):
W – вперед
S – назад
A – влево
D – вправо
F – стоп
G – руль прямо
K – включение фар
L – выключение фар
R –подъемник вверх
E – подъемник вниз
Q – подъемник стоп
T – захват
Y – отпустить
H – стоп клешне
Постоянно вводить команды неудобно, поэтому рекомендую использовать программу, для отправки команд. Я использую Z-Controller. В программе надо выбрать порт (com порт через который происходит соединение) и настроить клавиши на команды. Настройка простоя и интуитивная.

Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.

