


Всем добрый день. На этот раз мне попалась Lego 42075, модель внедорожника службы быстрого реагирования. Я добавил к ней лебедку, поставил на большие колеса из набора Lego 42029 и электрифицировал, используя для этого Arduino Pro Mini. Для управления будем использовать Bluetooth канал. На мой взгляд это самый удобный и стабильный способ управления моделями.
Для создания данной модели будем использовать:
- Lego Technic 42075
- Lego Technic 42029
- 2 белых светодиоды и резисторы подобранные к ним
- Мини мотор-редуктор 1:50 с валом 3 мм
- Arduino Pro Mini 5v AT Mega 328
- Драйвер двигателя L9110S
- 1 сервопривода SG-90
- Bluetooth модуль HC-06 или аналог
- USB-UART для прошивки Arduino
- Канцелярский или просто острый нож
- Мотор редуктор 6v 1:150
- Конденсатор 10v 1000uF
- 2 однорядных гребенки PLS-40
- Катушка индуктивности 68мкГн
- 2 аккумулятора Li-ion 18650
- Дрель
- Коннектор папа-мама двух контактный на провод
- Хомутик
- Провода разных цветов
- Припой, канифоль, паяльник
- Сверло по металлу 3.2 мм
- Болтики 3х20, 3х40, 3х60 гайки и шайбы к ним
Шаг 1 Подготовка механической части.
Начнем с мини мотор-редуктора, он необходим для лебедки. Выбирать надо с передаточным числом 1:50, крутиться медленно, зато лебедкой можно поднять большие грузы. Также выходной вал должен быть диаметром 3 мм. Вначале надо припаять провода к моторчику. Далее на выходной вал необходимо надеть соединительную втулку от Lego, вставив отрезок спички в один из пазов втулки. Для соединения с Lego деталями берем деталь от металлического конструктора, согнув ее в форме буквы "П" соединяем с мотор-редуктор при помощи хомутика:
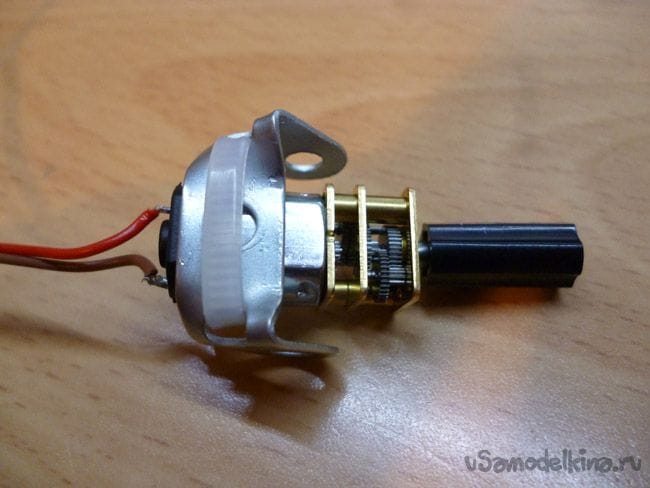
Затем прикручиваем, используя болтики 3х20, мотор-редуктор к Т-образной детали Lego.


Ведущая ось внедорожника – задняя. Модель не очень тяжелая, поэтому можно использовать мотор-редуктор с передаточным числом 1:150. И моторчиком на 6 вольт. Припаиваем провода к моторчику до установки на модель. Чтобы соединить колеса с валом мотор-редуктора, необходимо ножом подрезать выходные валы. Подрежьте выходные валы по форме креста и размерами с деталь Lego, а именно крестовую ось. Подрезать надо оба вала:

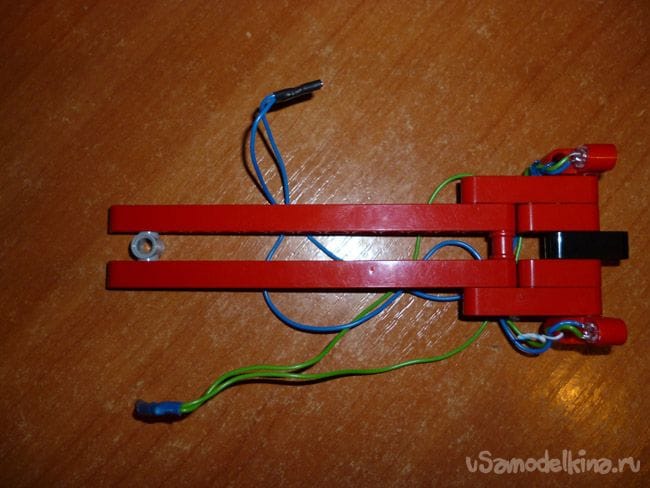
Переходим к механизму передних колес. Берем сервопривод SG-90. Рекомендую выбирать с металлическими шестеренками. Обрезаем выступающие части корпуса, необходимые для крепления. Берем дрель и просверливаем сквозное отверстие диаметром 3.2 мм. Если под руками нет дрели или нужного сверла, просто прорезаем небольшие отверстия в корпусе с двух сторон. Главное не повредить внутренний механизм и плату контрелера:

Надеваем на вал маленький рычаг, идущий в комплекте с сервоприводом. К рычагу прикручиваем маленькую Lego деталь, выглядит как овал с двумя крестовыми отверстиями:

На этом с механикой мы закончили.
Шаг 2 Сборка модели.
Для сборки модели нам необходима инструкция по сборке Lego Technic 42075. Она идет в комплекте с этим набором. Если вы ее потеряли или планируете собирать модель из деталей от другого конструктора, инструкцию всегда можно скачать на официальном сайте.
Скачать надо только 1 часть.
Так же понадобится инструкция от Lego 42029. Только вторая часть. Скачать можно здесь.
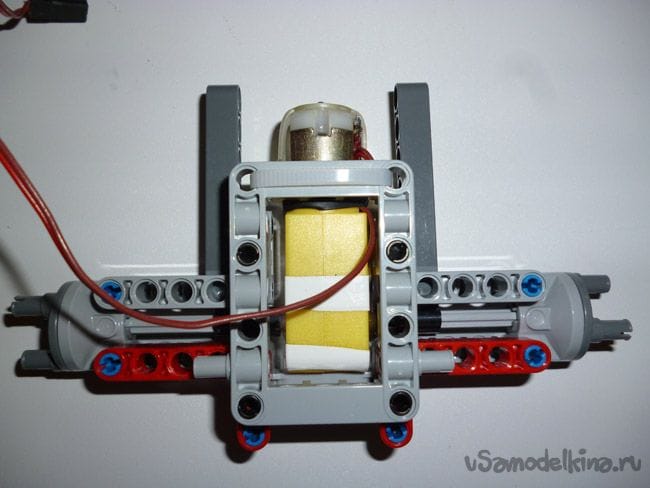
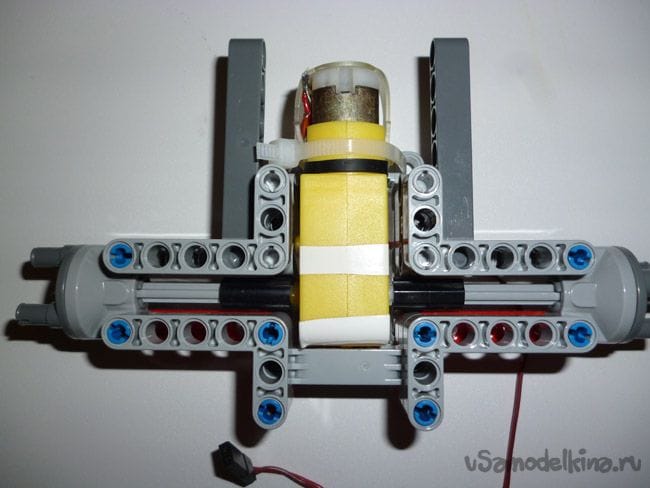
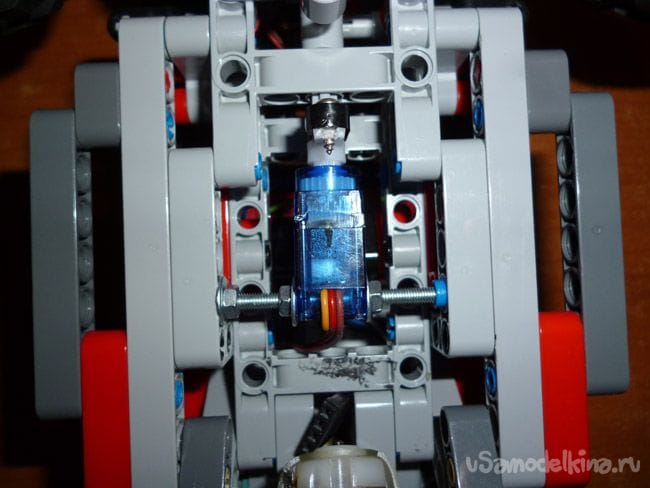
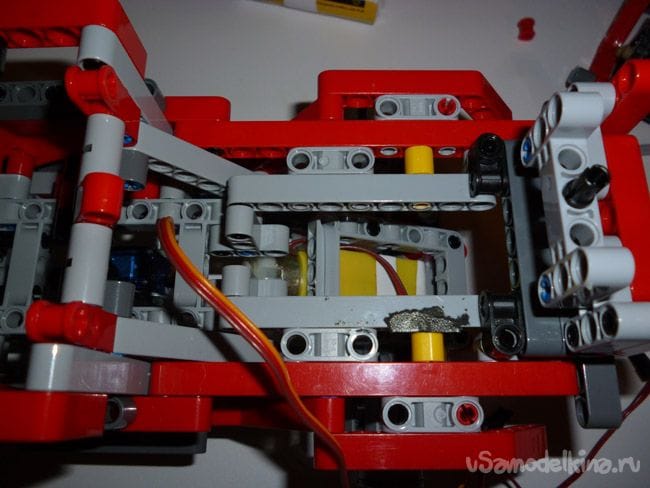
Переходим непосредственно к сборке. Берем инструкцию 42075. Вначале собираем с 1 по 15 страницу. Делаем по инструкции все, кроме установки шестеренок. Шестерни нам не нужны, а будут только мешать. Переходим к заднему мосту. Его надо собрать по фото. Вначале устанавливаем мотор редуктор, крепим его, а только после этого вставляем крестовые валы для соединения с колесами:
С установленными колесами выглядеть должно так:
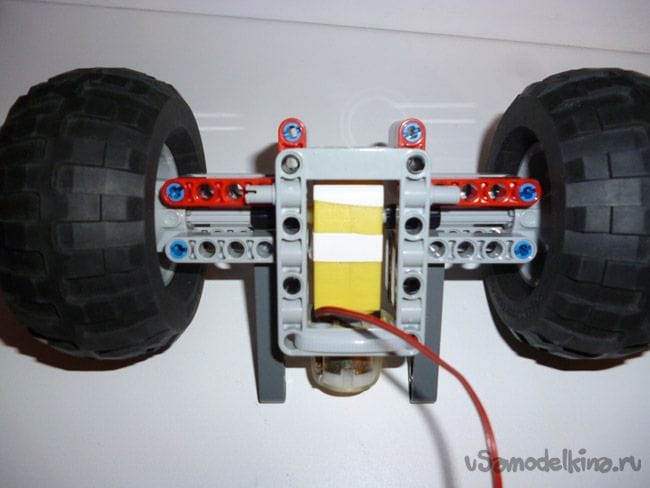
Устанавливаем задний мост на уже собранную основу:
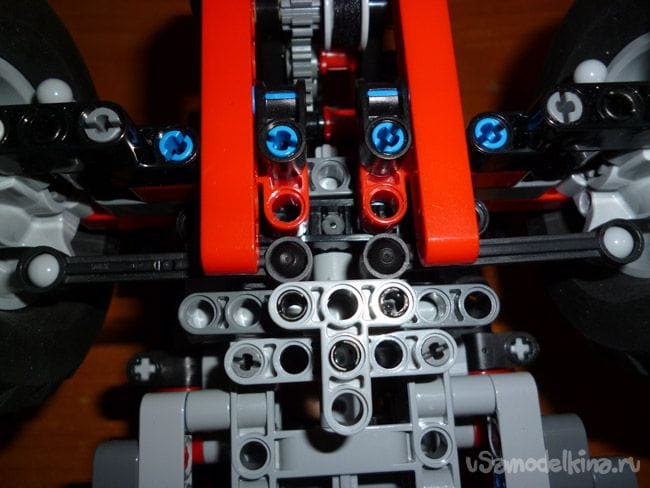
Передний мост также собираем по фото.
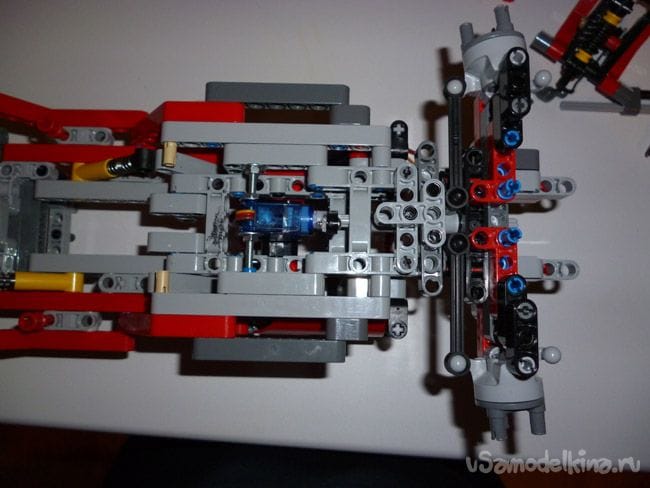
Сервопривод крепим, используя болтики 3х60 и гайки к ним:
Опять берем инструкцию и собираем заднюю часть модели со страницы 41 по 62. Далее двери и торпедо со страницы 66 по 71. А также кабину со страницы 98 по 101:
На данном этапе выглядеть должно так:

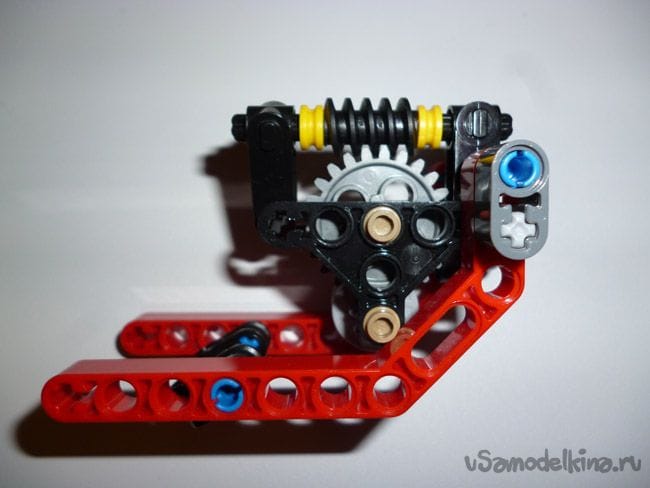
Собираем лебедку по инструкции от Lego 42029 часть 2 со страницы 15 по 21. Добавляем пару деталей для крепления к данной модели:
Крепим лебедку в передней части модели:

В нижней части модели лебедка крепится следующим образом:
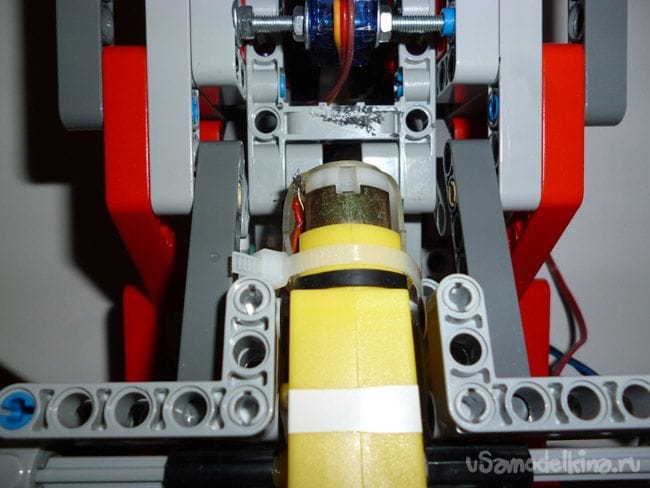
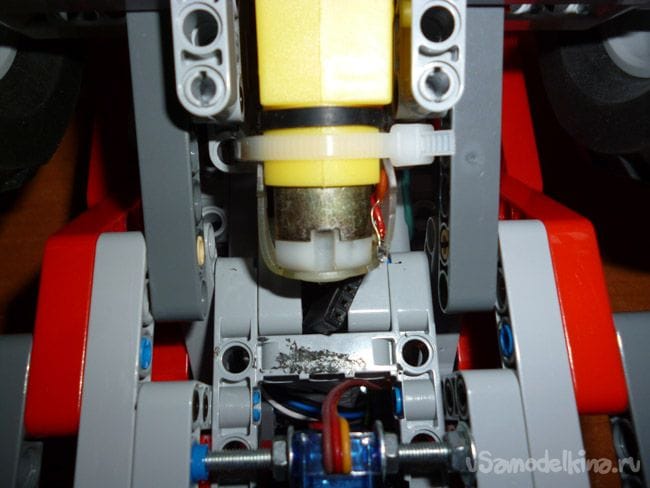
Устанавливаем привод лебедки, а именно уже подготовленный мини мотор-редуктор:

Полностью готовая лебёдка выглядит так:

Собираем капот по инструкции 42075 со страницы 87 по 95. Немного изменив крепление, как показано на фото:

Ставим капот на место, и переходим к сбору небольшой крыши. На нее же ставим два светодиода, в качестве фар:
Ставим ее на модель:
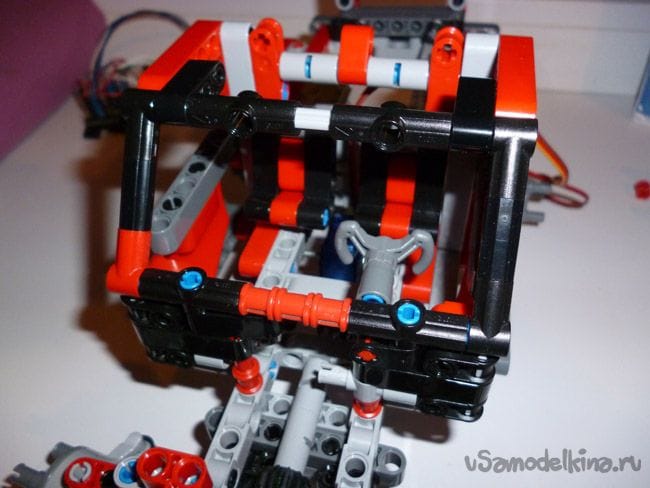
Опять обратимся к инструкции 42075, на этот раз собираем со страницы 63 по 65 и со 104 по 105. Получаем детали закрывающие всю электрику:

Шаг 3 Электрификация.
Итак, самое интересное. Питание Arduino и моторчиков лучше разделять, во избежание перезарузки контроллера при прыжках напряжения. Модель небольшая и для питания Arduino будем использовать маленькую батарейку A27 или A23. Прижимаем к контактам батарейки провода и фиксируем их изолентой:

Для питания моторчиков берем два Li-ion 18650. Спаиваем их параллельно и изолируем, выводя наружу коннектор питания:

Если кому интересно, можно запитать все от аккумуляторов, но тогда нужно ставить катушка индуктивности 68мкГн в разрыв плюсового провода питания Arduino. А также добавить конденсатор 10v 1000uF, включенный параллельно питанию Arduino. Схема следующая:
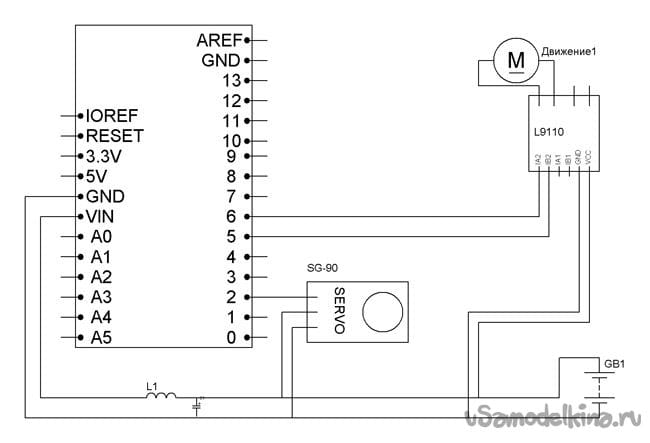
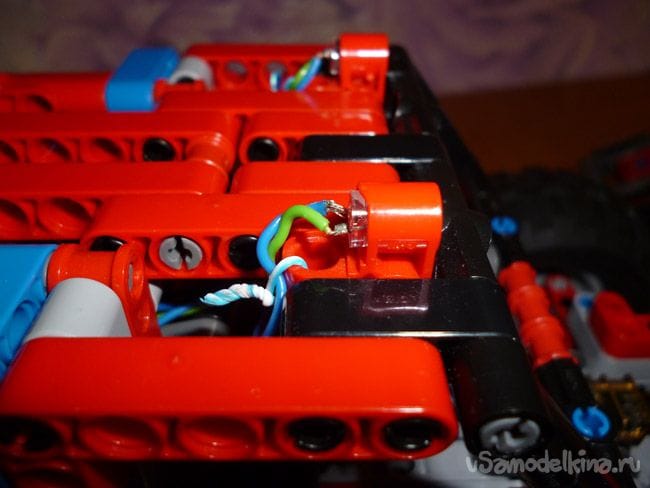
Переходим к соединению всего воедино. Сигнальный провод от сервопривода подключаем к pin 2, контакты от драйвера двигателя, привода колеса, к pin 5 и 6, от драйвера лебедки к pin 9 и 10. Рассчитав необходимые резисторы для светодиодов, ставим их в разрыв плюсового провода, идущего к светодиодам. Аноды от светодиодов фар, идущие через резисторы, подключаем к 4 pin, катоды к GND.
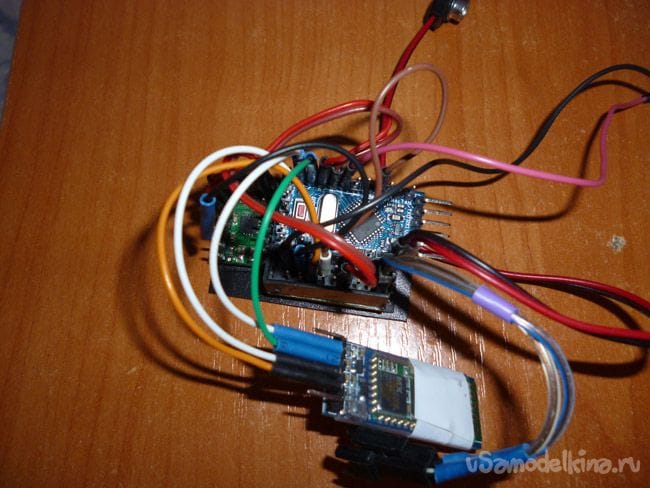
Контакты TX и RX Arduino нужны для соединения с компьютером, поэтому Bluetooth модуль подключим через библиотеку SoftwareSerial. То есть через созданный программный com-порт. Подключение модуля следующее:
Arduino Pro Mini - Bluetooth
D7 – RX
D8 – TX
5V – VCC
GND –GND
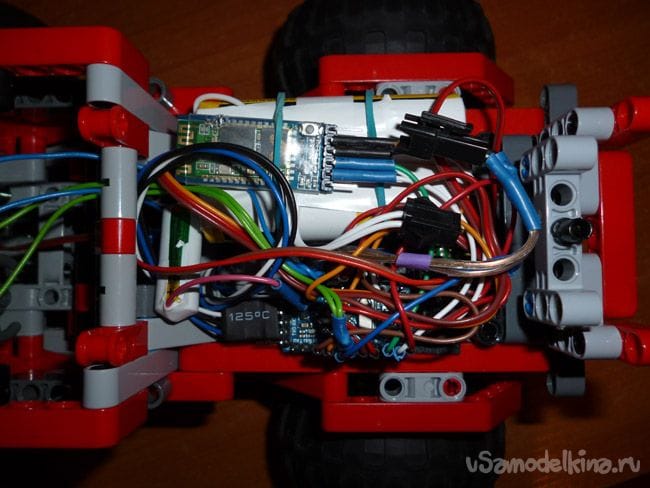
Собираем всю электрику:
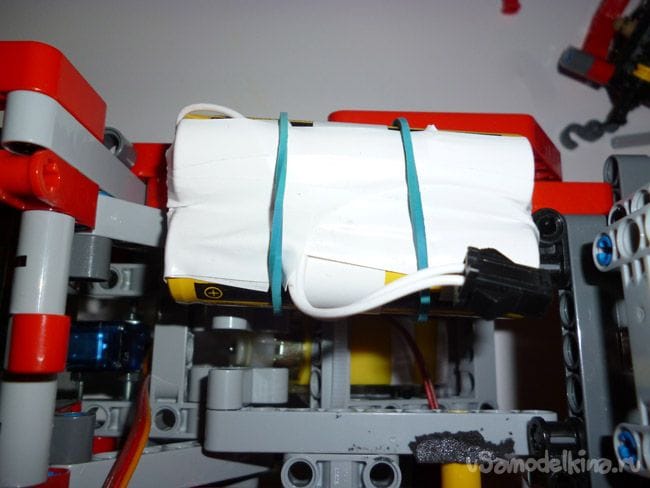
Все это будем размещать в задней части модели, над задним мостом:
Вначале крепим на двусторонний скотч или банковской резинкой аккумуляторы:
Рядом с ними на двусторонний скотч фиксируем Arduino и драйвер двигателя:
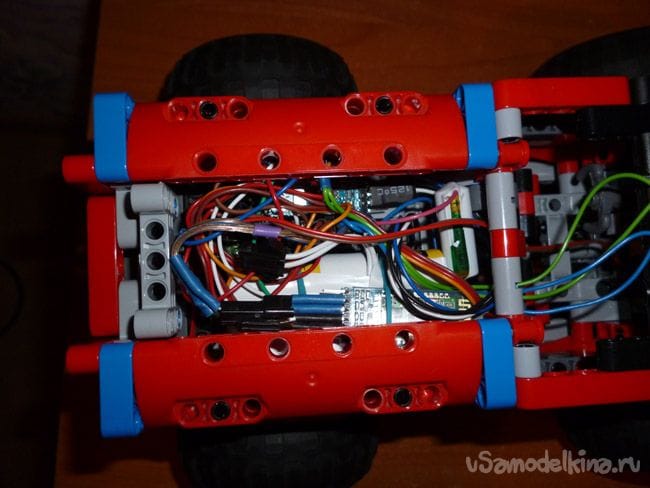
Теперь можно надеть колеса на модель и прикрепить боковые детали, закрывающие электрику:
Для удобства последующей заливки скетчей, выведите наружу провода для соединения с USB-TTL конвертером.
Шаг 4 Любуемся.
Сделаем перерыв и полюбуемся красотой модели:





Шаг 5 Подготовка среды программирования и заливка скетча.
Для редактирования и заливки скетчей удобно пользоваться Arduino IDE. Если у вас она стоит, проверьте в актуальном ли она состоянии. Или скачиваем и устанавливаем ее с официального сайта.
Дальше нам необходимо добавить следующие библиотеки. Servo.h библиотека упрощающая работу с сервоприводом, и SoftwareSerial.h для создания программного порта связи для Bluetooth модуля:
Скачанные и распакованные архивы надо переместить в папку «libraries», находящуюся в папке с установленной Arduino IDE. Можно пойти и другим путем, а именно не распаковывая архивы, добавить их в среду программирования. Запускаем Arduino IDE, выбираем в меню Скетч – Подключить библиотеку. В самом верху выпадающего списка выбираем пункт «Добавить .Zip библиотеку». Указываем место нахождения скачанных архивов. После всех действий, необходимо перезагрузить Arduino IDE.
Шаг 6 Настройка Bluetooth модуля.
Перед использование, Bluetooth модуль необходимо настроить. Для этого заливаем в Arduino плату следующий скетч:
Он нужен для связи компьютера с Bluetooth модулем. Используем окном терминала из Arduino IDE. Выбираем пункт Инструменты – Монитор порта.
Для HC-05, устанавливаем скорость 38400, ставим параметр отправки NL и CR и вводим следующие команды:
«AT» - вводится без кавычек должен прийти ответ «OK». Если пришел продолжаем вводить команды дальше.
«AT+UART=57600,0,0» - устанавливаем скорость 57600 бит/сек.
Шаг 7 Заливка скетча.
Чтобы наша модель ожила, заливаем следующий скетч:
Шаг 8 Управление моделью.
Управлять моделью можно несколькими способами. Самый простой это использование Android устройства в качестве пульта. Вначале стоит добавить Bluetooth устройство нашей модели в Android. Для этого заходим в настройки Bluetooth, находим наш Arduino модуль и подключаемся, используя пароль для соединения «1234», возможно пароль будет «0000», у разных моделей бывает по-разному. Затем устанавливаем программу управления. Скачиваем с Google play программу Arduino BT Joystick Free. Установив и запустив настройки программы, устанавливаем следующие команды:
W – вперед
S – назад
A – влево
D – вправо
F – стоп
G – руль прямо
Y – лебедка вниз
T – лебедка вверх
H – лебедка стоп
K – включение фар
L – выключение фар
Если вы поклонник Windows устройств, или просто Android нет под руками, скачиваем следующую программу:
На Windows устройстве также следует вначале добавить новое устройство, используя тот же пароль. А также настроить программу на те же команды.
На мой взгляд удобнее всего использовать физический пульт, так как тогда чувствуется нажатие кнопки. Я рекомендую изготовить пульт, следуя инструкции.
И добавить в него Bluetooth модуль. Подробное описание процесса.
Также добавляю видео демонстрирующее работу моей модели:
И работу отдельно лебедки:

Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.


