И снова я со своими игрушками. Сегодня мы будем делать вертикальный плоттер. Преимуществ у него достаточно. Во-первых, легкая и мобильная конструкция. Используя присоски его можно закрепить на стекле (например, окно дома или витрина магазина) и рисовать маркером. Также можно закрепить на доске для рисования маркером (в школе или институте) и рисовать специальным маркером. А можно закрепить на любом полотне (фанерка, пластик или подобное) и рисовать на бумаге. Во-вторых, большая рабочая площадь при малом весе и размере конструкции. Используя ремешки от старых принтеров длиной около 60 см, можно рисовать на листе бумаге формата А3. В-третьих, универсальность используемого инструмента, можно закрепить маркер практически любой толщины. Ну в-четвертых, доступность компонентов для изготовления плоттера.
Список необходимого:
- Arduino Uno
- CNC Shield v3
- Драйвер шагового двигателя A4988 – 2шт.
- Шаговый двигатель (типа Nema 17)
- Зубатый шкив – 2шт
- Зубчатый ремешок (длиной не менее 600 мм) – 2шт
- Блок питания на 12 В, 3А
- Стабилизатор напряжения на 5 В
- Сервопривод SG-90
- Фанера толщиной 3 мм (подойдет и фанера до 6 мм)
- Ненужный DVD или CD диск
- Соединительные повода
- Паяльник, припой, канифоль и прочее
- Болтики с потайной головкой 3 х 60 мм, шайбы и гайки к ним
- Сверла по металлу 2,8; 3; 4 мм
- Метчики резьбы на 3 и 5
- Дрель
Шаг 1 Изготовление основы.
Основой будет служить тонкая фанера. Вырезаем прямоугольник размером 460 х 120 мм. При таком размере основы, рабочая площадь будет размером с лист А3 (420 х 297 мм):

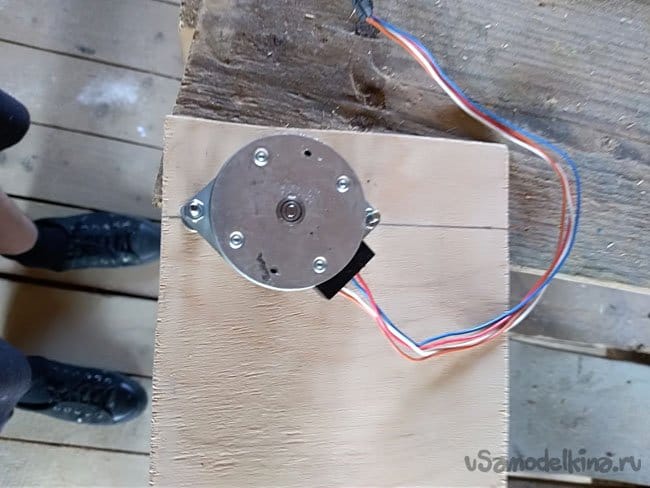
Шаговые двигатели можно практически любые. Я, например, возьму их из старого принтера.

По краям фанерки проделываем отверстия для крепления шаговых двигателей. Отступаем от краев примерно 30 мм. В моем случае это два отверстия с расстоянием между ними 50 мм. В проделанных отверстия не забудьте снять фаску, с обратной стороны. Важно чтобы крепежные болтики не выступали:

Вставляем в отверстия болтики длиной 60 мм:
Зубчатый шкив надо подбирать под диаметр выходного вала шагового двигателя обычно, это 3 мм, а ремешок соответственно под шкив. Короче, главное, чтобы шкив сел на вал плотно, а ремешок при движении по шкиву не перескакивал через зубья. Надеваем шкив на двигатель:
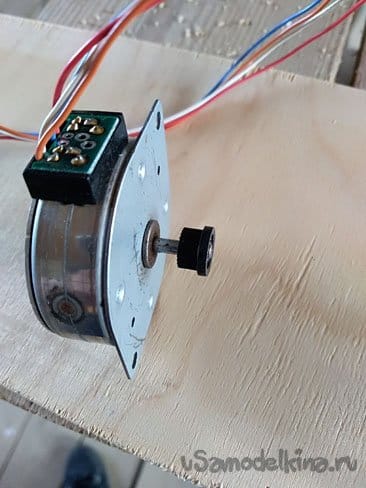
Со вторым двигателем поступаем также. Я все части брал от старых принтеров. Поэтому, они все подходили. При покупке новых, внимательно смотрите на параметры, чтобы они совпадали. Крепим двигатель с надетым шкивом к фанерке. Шкив должен вращаться свободно, между ним и фанеркой должно быть 2 – 3 мм:

Сверху выглядит так:
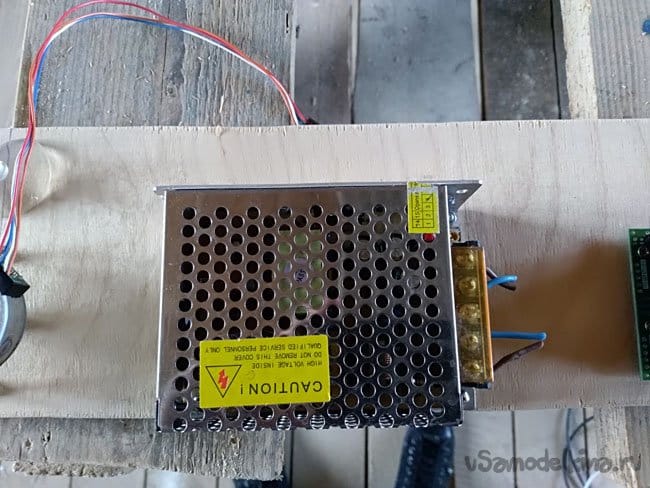
Между двигателей, ближе к левой стороне (отступив примерно 20—40 мм от двигателя), к фанерке прикручиваем блок питания:
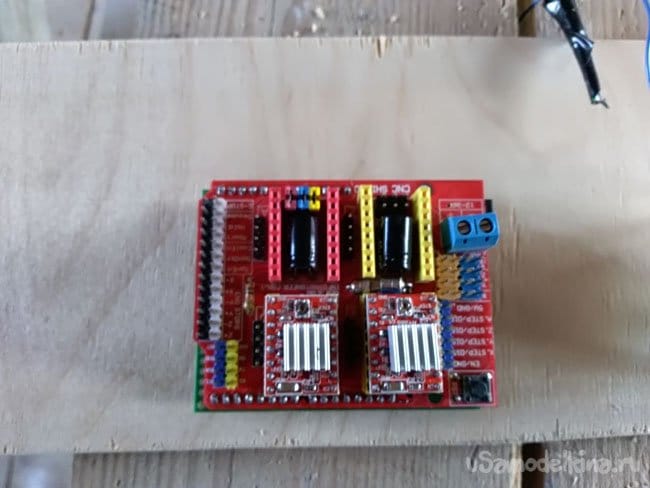
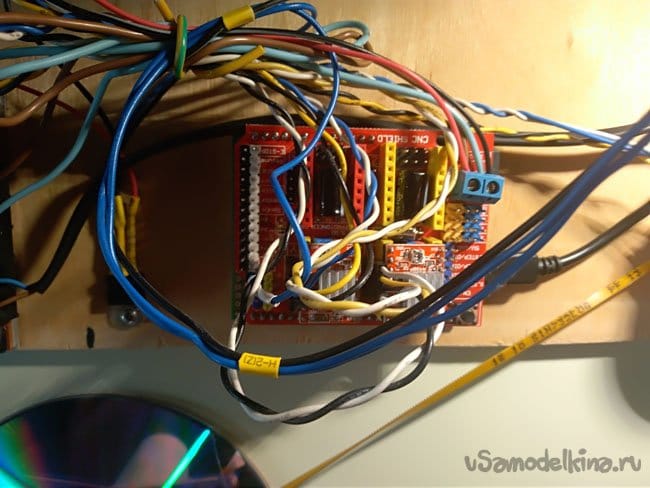
Правее блока питания, ближе к правому двигателю, крепит Arduino Uno:

На Arduino ставим CNC Shield v3. В CNC Shield вставляем два драйвера, на ось X и ось Y. Лучше сразу прикрепить радиаторы охлаждения на драйверы:
Шаг 2 Собираем все вместе.
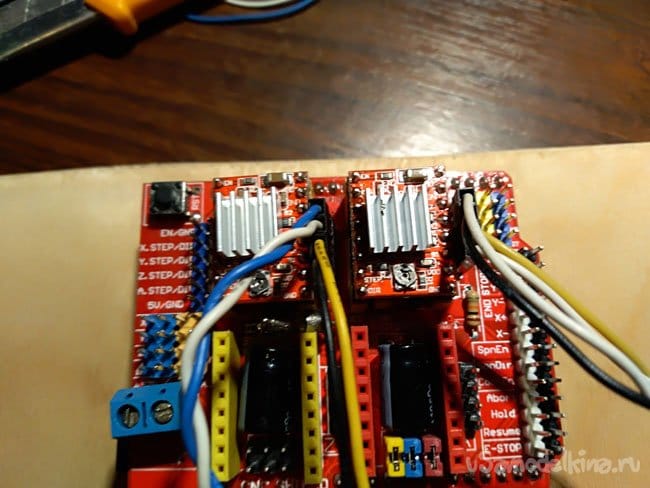
Итак, возьмем в руки паяльник. Припаиваем провода к шаговым двигателям, на другом конце клепаем разъем для подключения к CNC Shield и вставляем в разъемы рядом с осью X для левого двигателя и осью Y для правого двигателя:
Для питания двигателей нам нужно 12В, а питания сервопривода SG-90 не более 7. Поэтому для питания SG-90 берем стабилизатор на 5В (например, 7805), припаиваем к нему провода:

Крепим на фанерке:

С блоком питания все просто. Подаем на него 220В, получаем 12В. Выходы от блока питания подключаем к CNC Shield. И не забываем подать 12В на вход стабилизатора:

Сервопривод будет ездить на карате, вместе с маркером. Поэтому сделайте связку из 3 провод длиной примерно 50 см. Один будет идти от выхода стабилизатора напряжения, второй от минусу выхода блока питания, а третий (сигнальный) должен быть подключен к контакту Z+. В итоге должно получиться что-то подобное.
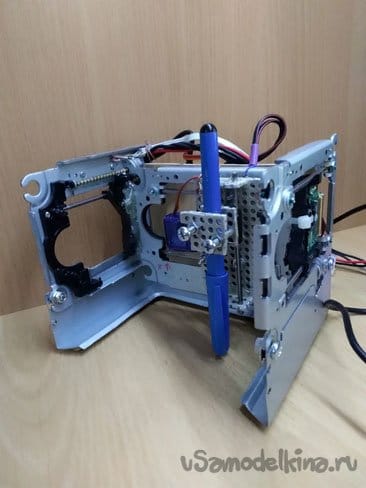
Шаг 3 Изготовление кареты.
Если есть доступ к 3D принтеру, проще всего и лучше, напечатать карету на нем. Именно от кареты , в основном, зависит качество рисования нашего плоттер. У меня такого принтера нет, поэтому изготовим карету из подручных материалов. Для начала берем отрезок полипропиленовой трубы диаметром 25 мм.

Отрезаем от трубы 80 мм. В середине делаем отверстие 4 мм. И нарезаем резьбу метчиком на 5 мм:

В проделанное отвесите с резьбой вкручиваем болт 5 х 20 мм. Он нужен для фиксации пишущего инструмента:

Теперь из тонкого пластика необходимо изготовить две такие детали:

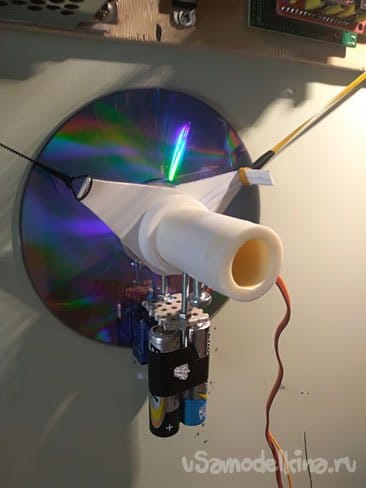
Диаметр отверстия этих деталей 25 мм. Края необходимо отогнуть на 90 градусов. Продеваем нашу заранее подготовленную трубку в эти детали. По сторонам от этих деталей надеваем стопорные кольца. Внизу трубки необходимо проделать два отверстия диаметром 2,8 мм, нарезать в них резьбу метчиком на 3 мм. Вкрутив в проделанные отверстия болтики диной 30 мм, крепим на их концах небольшую пластинку, сделанную из пластика или тонкого металла. И к этой пластине приклеиваем сервопривод. Карета получилась легкая, поэтому для натяжения ремней необходимо добавить небольшой груз. Я прикрутил две использованные батарейки типа АА. Этого было достаточно. В итоге должно получиться что-то подобное:



Осталось приклеить DVD или CD диск к трубке, так чтобы отверстие диска совпадало с отверстие в трубке, а рычаг сервопривода выступал за диск, а при повороте рычага, он должен подымать карету.
Шаг 4 Вешаем карету на место.
Карета должна висеть у нас на двух ремешках. На концах ремешков делаем петельки:

На одном конце ремешков будет висеть карета. Чтобы уравновесить карету на другой конец ремешков необходимо повесить небольшой груз. Я опять взял две батарейки типа АА. Приматываем к ним скрепку, и получается отличный грузик:

Один конец ремешка надеваем на карету, на один из рычагов. Продеваем свободный конец с петелькой через двигатель, и накидываем на шкив. Перекинув ремешок, подвешиваем грузик на свободную петельку ремешка.


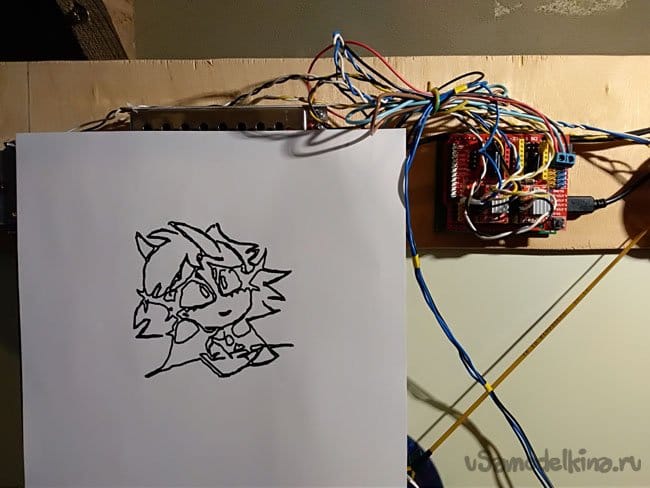
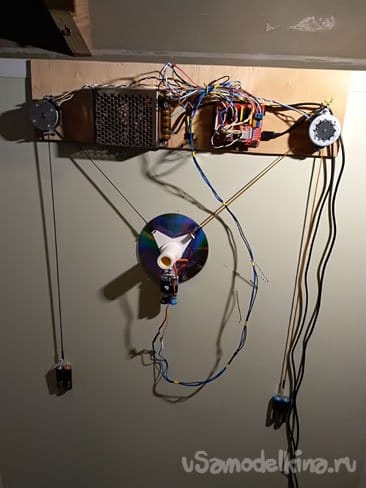
То же самое проделываем и со вторым ремешком. Таким образом мы подвешиваем карету на ремешках. А грузики нужны чтобы натягивать ремешки. Без натяжения ремешки будут проскальзывать при движении двигателей. В собранном виде плоттер выглядит так:
Теперь установим карету в начальное положение. Замерив расстояние между двигателей делим его пополам, и находим тем самым середину между ними. Отметим маркером на фанерке, чтобы каждый раз не мерить его. Отступаем 100 мм вниз, это и есть наша искомая начальная позиция кареты. Перед началом работы необходимо вручную устанавливать карету в эту позицию.
Как я уже говорил, маркер можно использовать практически любой, главное, чтобы его можно было продеть через трубку. Для тестов возьмем толстый маркер.

Шаг 5 Подготовка скетча и программы управления.
Для работы плоттера и управления им мы будет использовать труды одного из гуру разработчиков Sandy Noble. Заходим на его страничку на Github.
Нам нужно скачать polargraph_server_a1 – это скетч для Arduino. Скетч универсальный. Его можно настроить для работы с разными драйверами и для разных плат. Чтобы не вдаваться в тонкости настройки, можете скачать скетч, с правильными настройками для нашего плоттера:
Для управления плоттером с того же сайта скачиваем «polargraphcontroller».
Программа написана на processing. Для ее работы нужно скачать processing-2.2.1. Именно эту версию, так как в более свежих версия будут возникать ошибки компиляции. Скачиваем с сайта
Для заливки скетча нам понадобиться Arduino IDE. Скачиваем с официального сайта проекта
Заливаем скетч в Arduino. В программе управления много настроек. Подробное описание по работе с этой программой можно посмотреть на видео:
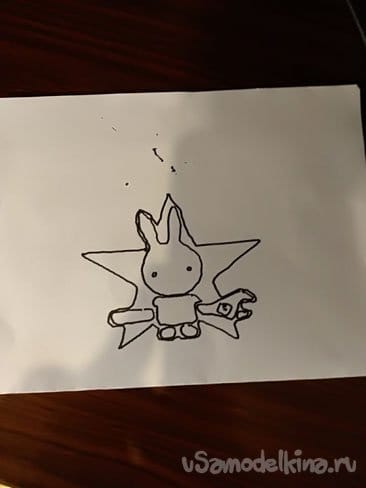
Примеры работы плоттера:

Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.