

Здоровья и удачи вам, решившим потратить время на прочтение этого текста!
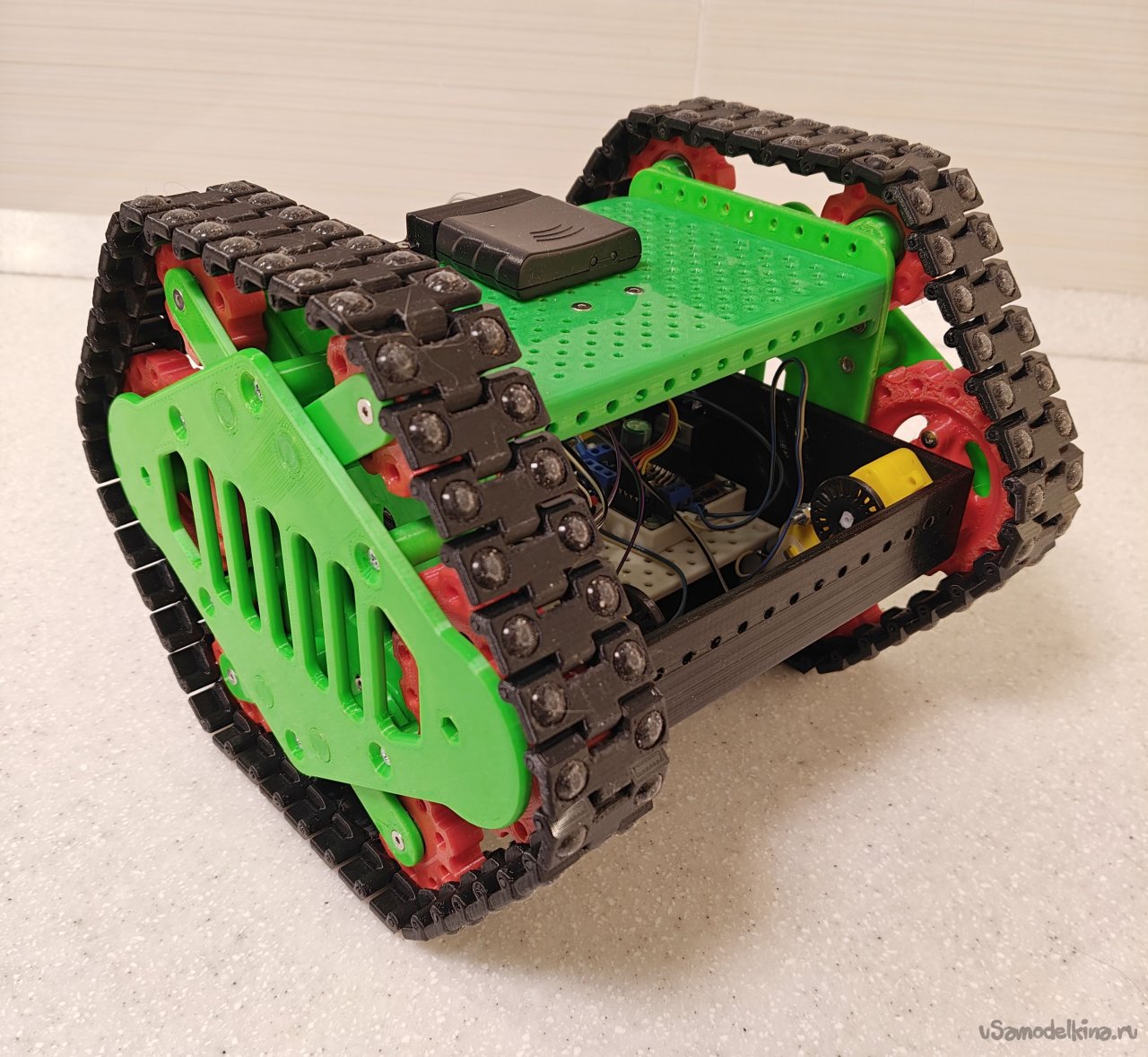
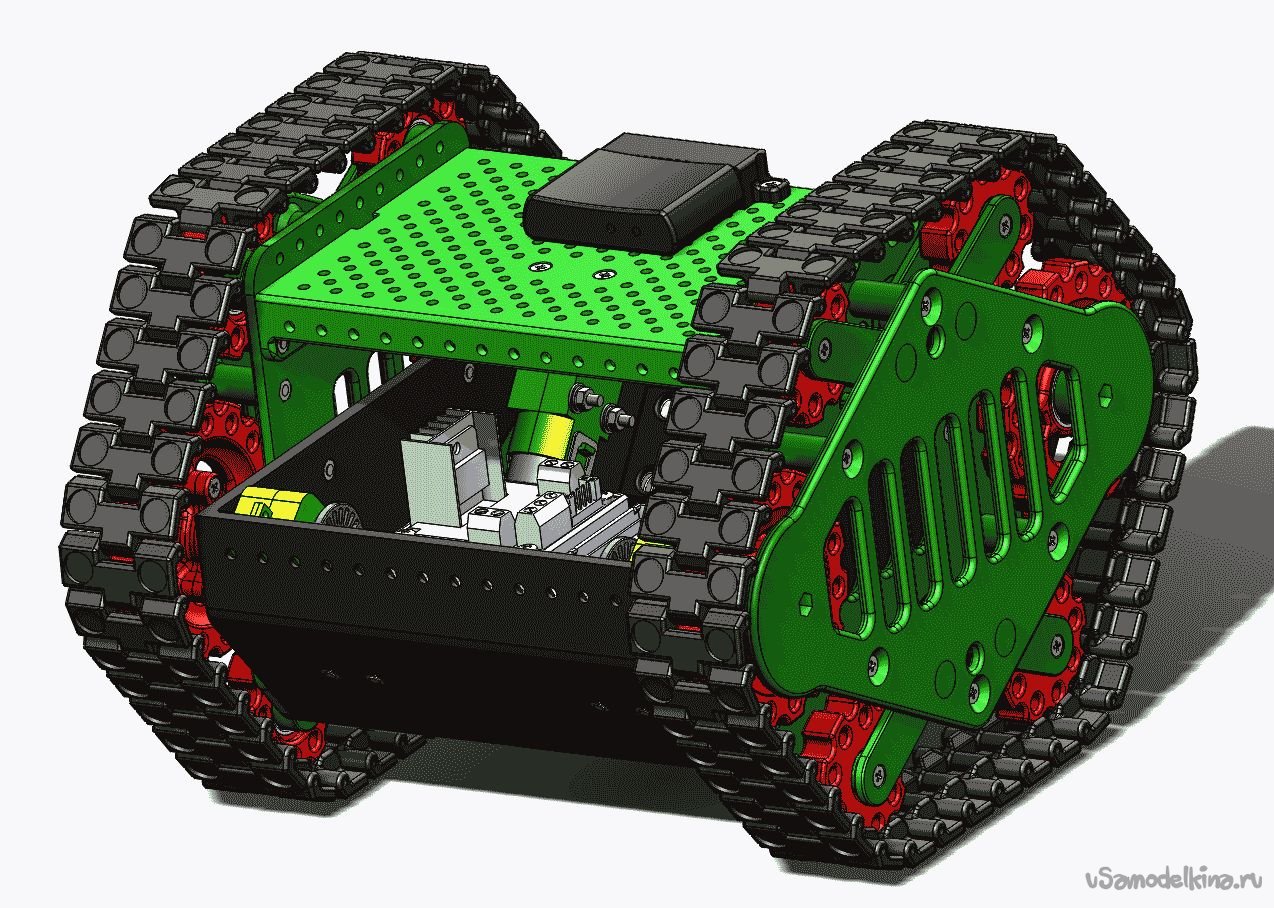
Представляю модель самоходной гусеничной платформы. Ходовая часть платформы построена по схеме «охватывающие весь корпус гусеницы». В качестве двигателей применены четыре мотор-редуктора TT (по два на гусеницу). В качестве источника питания – два аккумулятора 18650 с возможностью зарядки через разъем USB type-C. В этой модели применены наборные гусеницы из жестких траков. Для уменьшения трения в ходовой части применены шариковые подшипники.
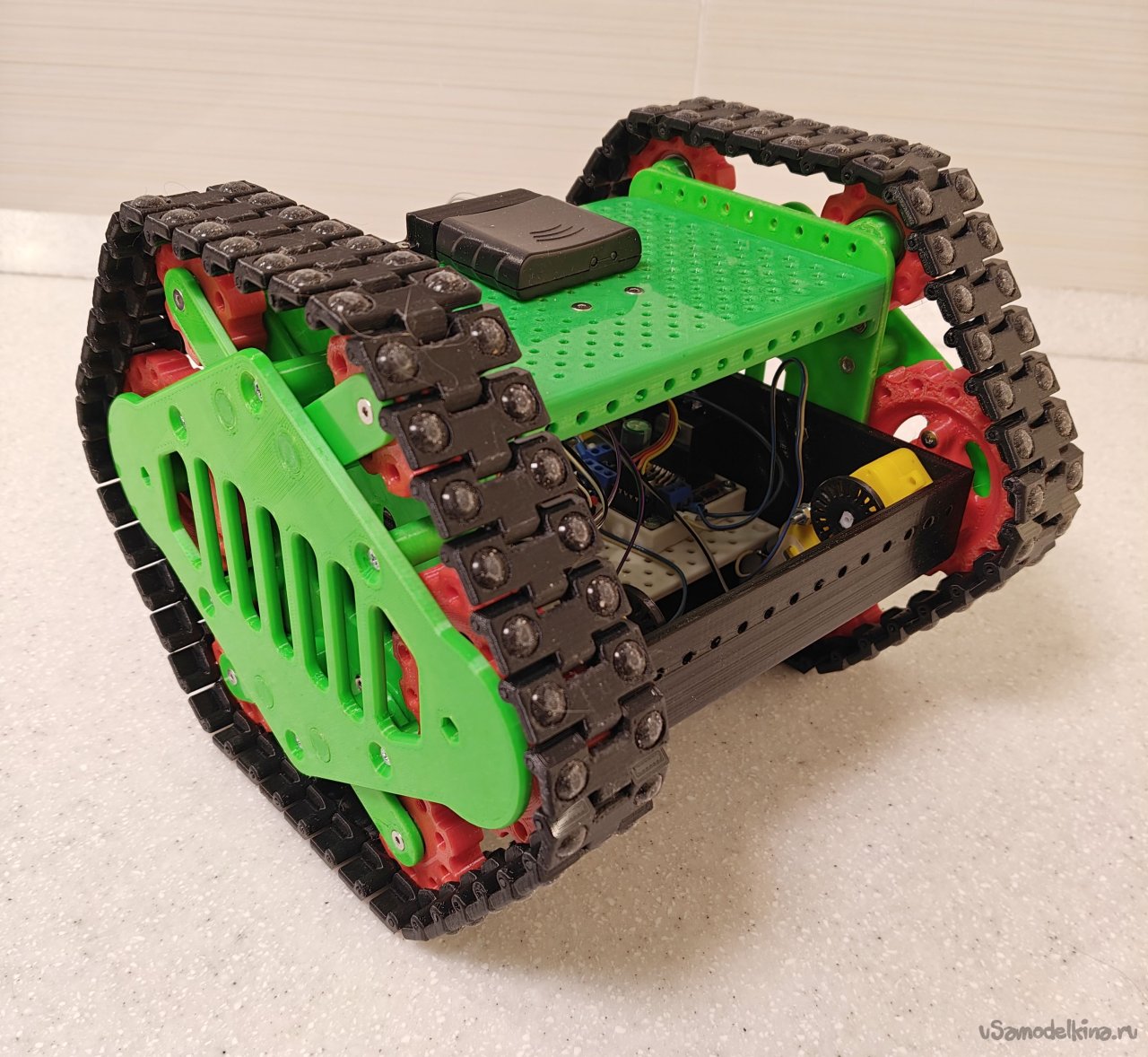
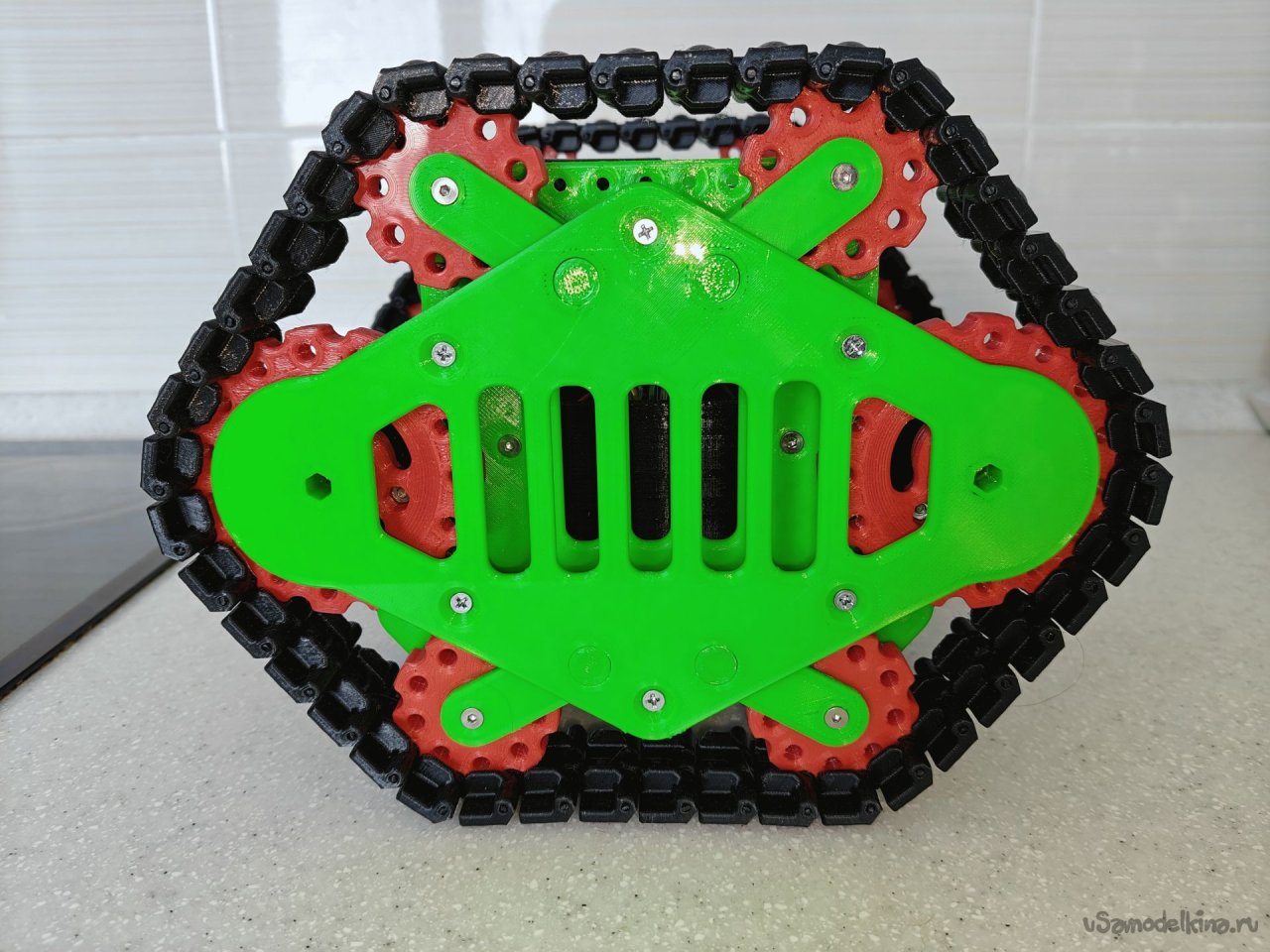
В конечном счете, получилось вот такое:
Гусеницы.
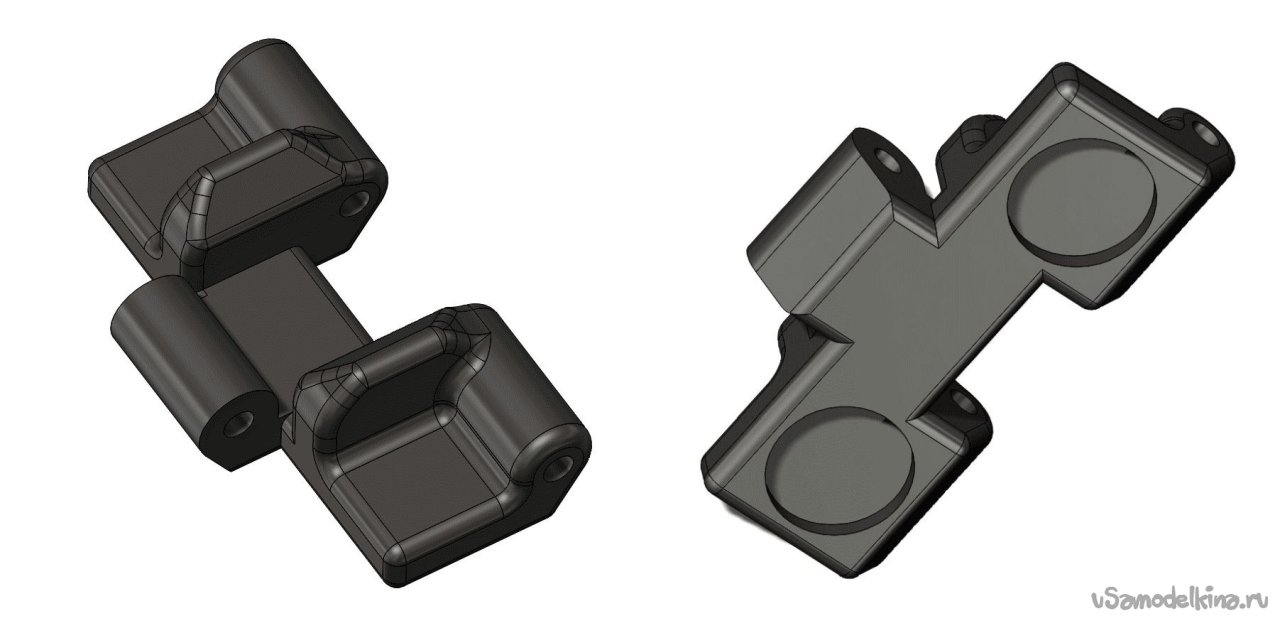
Итак, начнем с вешалки, пардон, с гусениц. Траки наших гусениц напечатаны из черного PETG-пластика и имеют такой вид:
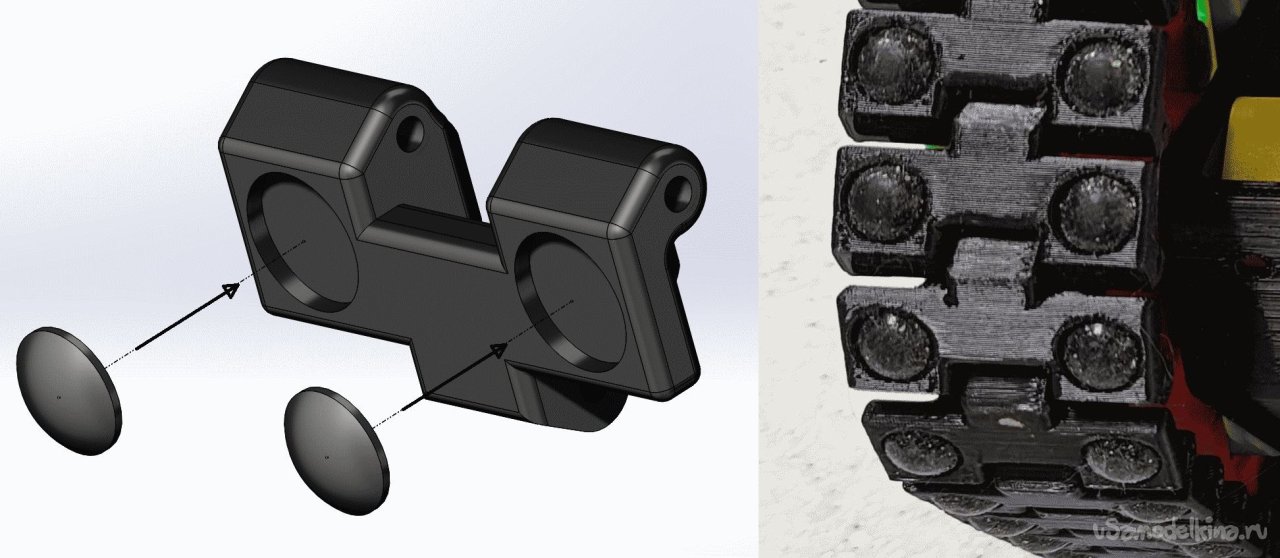
На траках установлены противоскользящие вставки, в качестве которых, использованы мебельные самоклеящиеся накладки-демпферы для дверок (диаметр 8мм). Вот такие:

Под эти накладки в траках сделаны специальные углубления (глубина 1,2мм), куда они четко и встают:
Траки соединены между собой пальцами из отрезков того же филамента (Æ 1,75мм), из которого они напечатаны, общее число траков 42 на гусеницу.
Печать траков велась без поддержек, вот в таком положении:
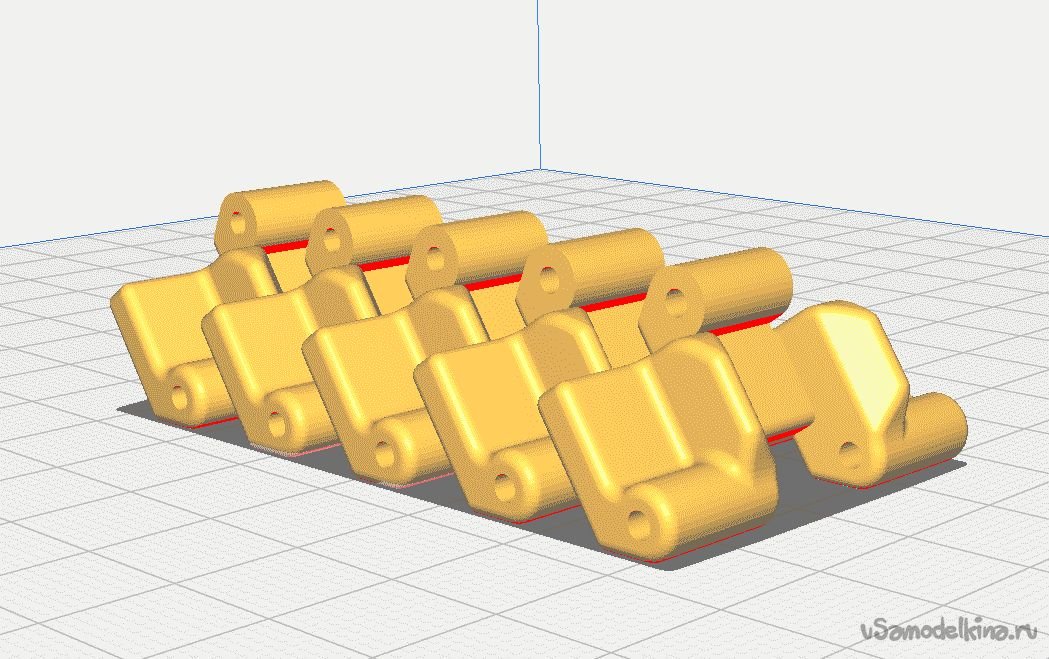
При этом достигается минимум послепечатной доработки, но как говориться, «доводку напильником никто не отменял» J . Отверстия в вилочковой части трака необходимо пройти сверлом Æ 1,8мм, в хвостовой - Æ 2мм
Общая конструкция
Все детали модели распечатаны на 3D-принтере «Tronxy-D01». Гусеницы и торсионные пружины напечатаны PETG-пластиком, остальные детали - PLA.
Общий вид спереди:
Общий вид сзади:
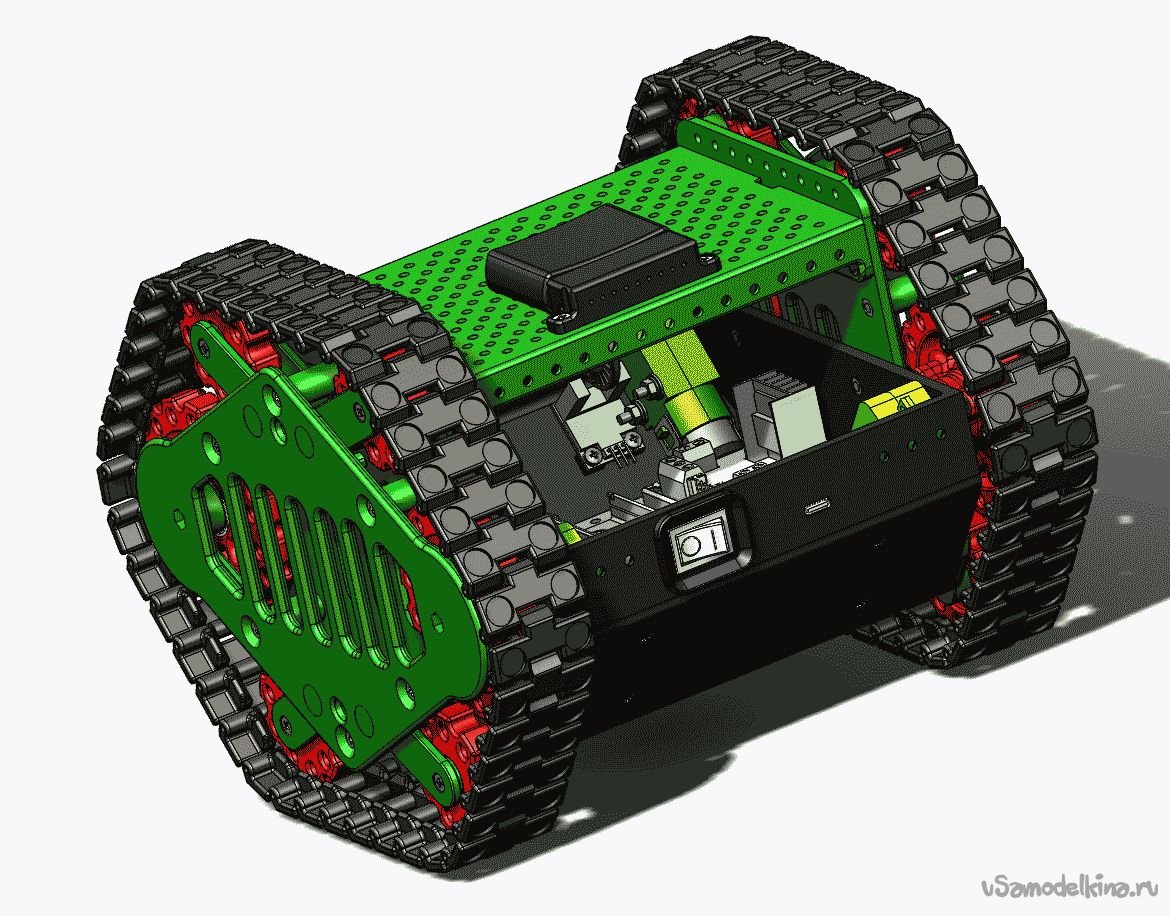
Вид слева:
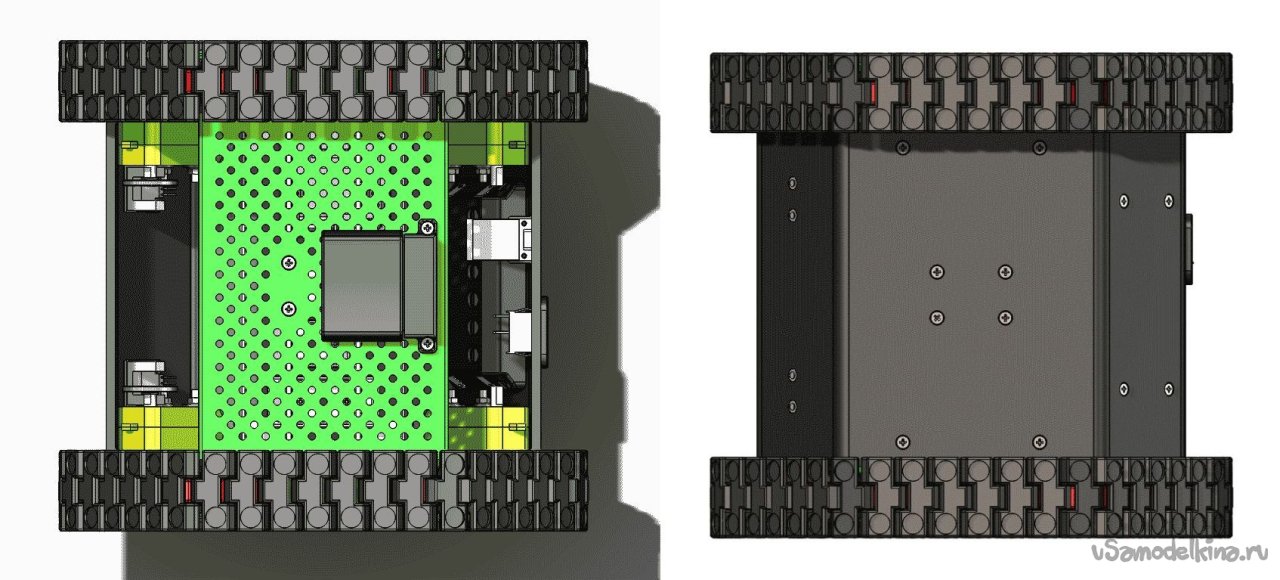
Вид спереди и сзади:

Вид сверху и снизу:
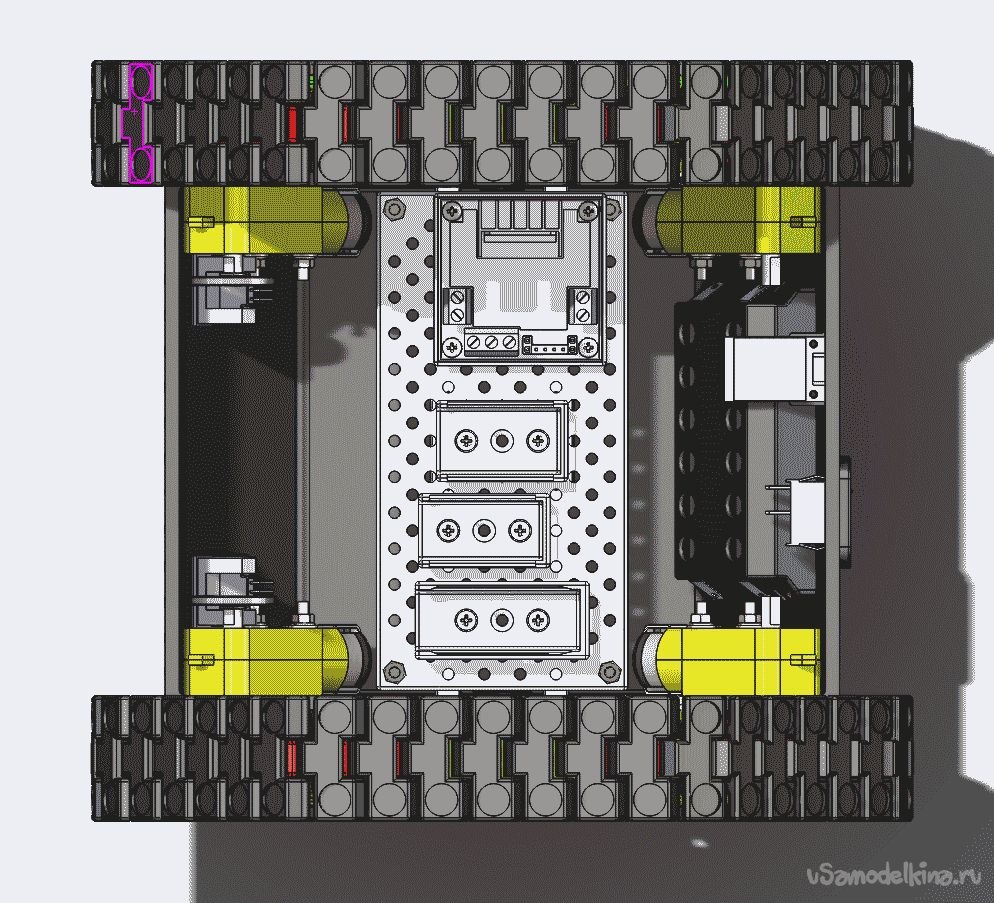
Вид сверху со снятой верхней крышкой:
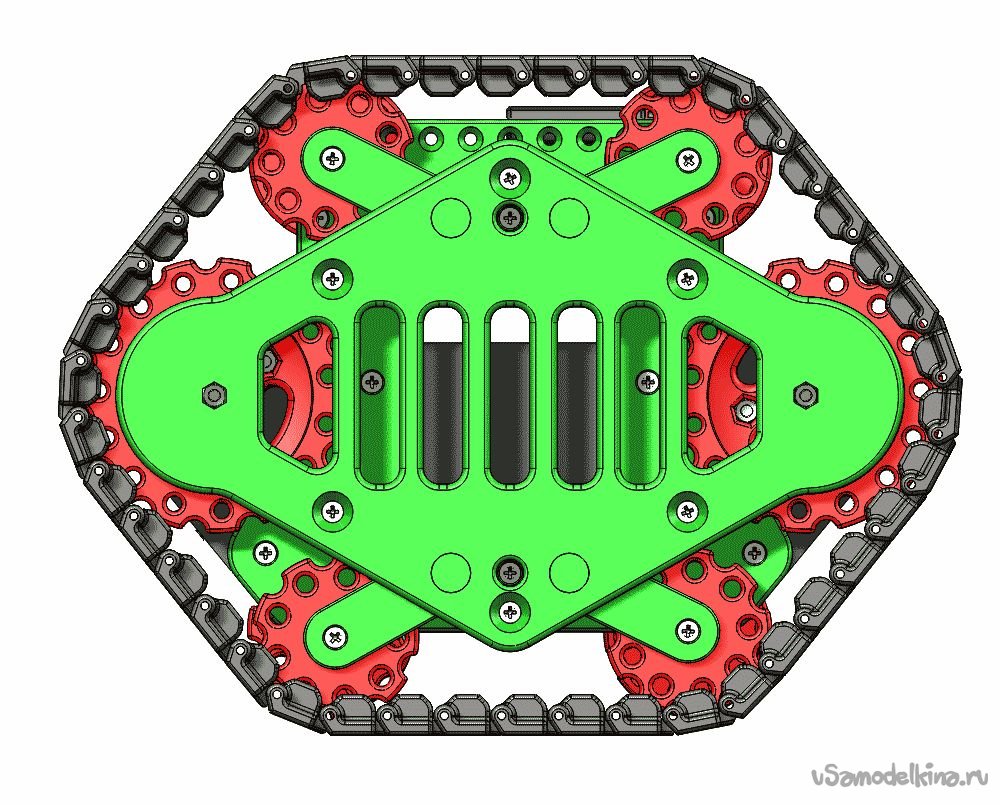
Как уже было сказано в начале, основу ходовой части составляют охватывающие весь корпус гусеницы.
Ходовая часть (убрана боковая стенка):
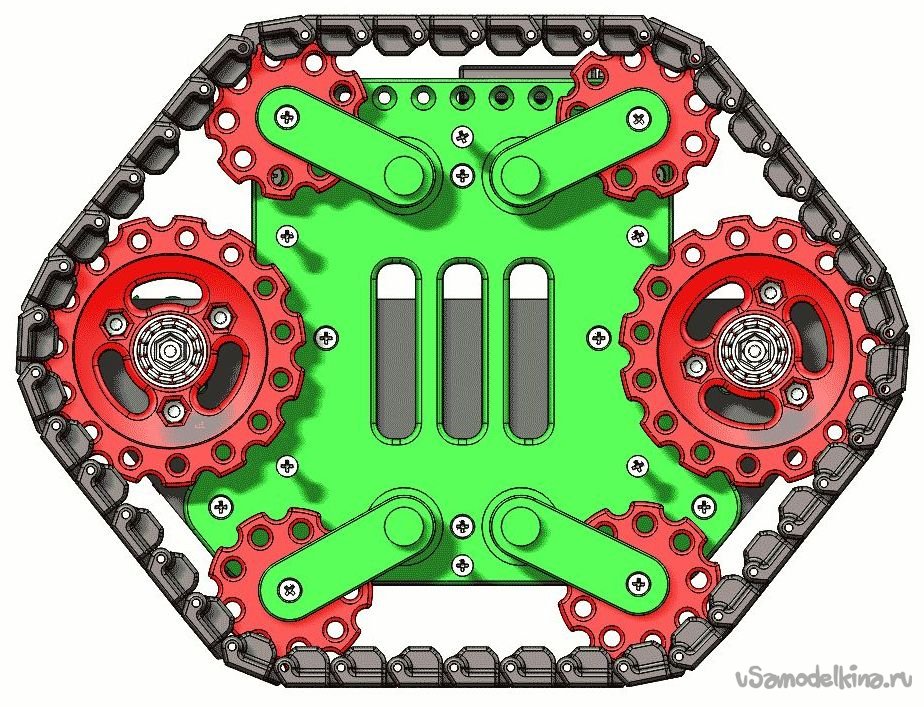
Ходовая часть, вид из внутренней части корпуса:
Опорные и поддерживающие катки подпружинены упругими элементами, работающими на скручивание (торсионами). За счет чего обеспечивается натяжение гусениц и мягкая подвеска корпуса. Торсионные пружины напечатаны PETG-пластиком, так как PLA не обладает достаточной упругостью.
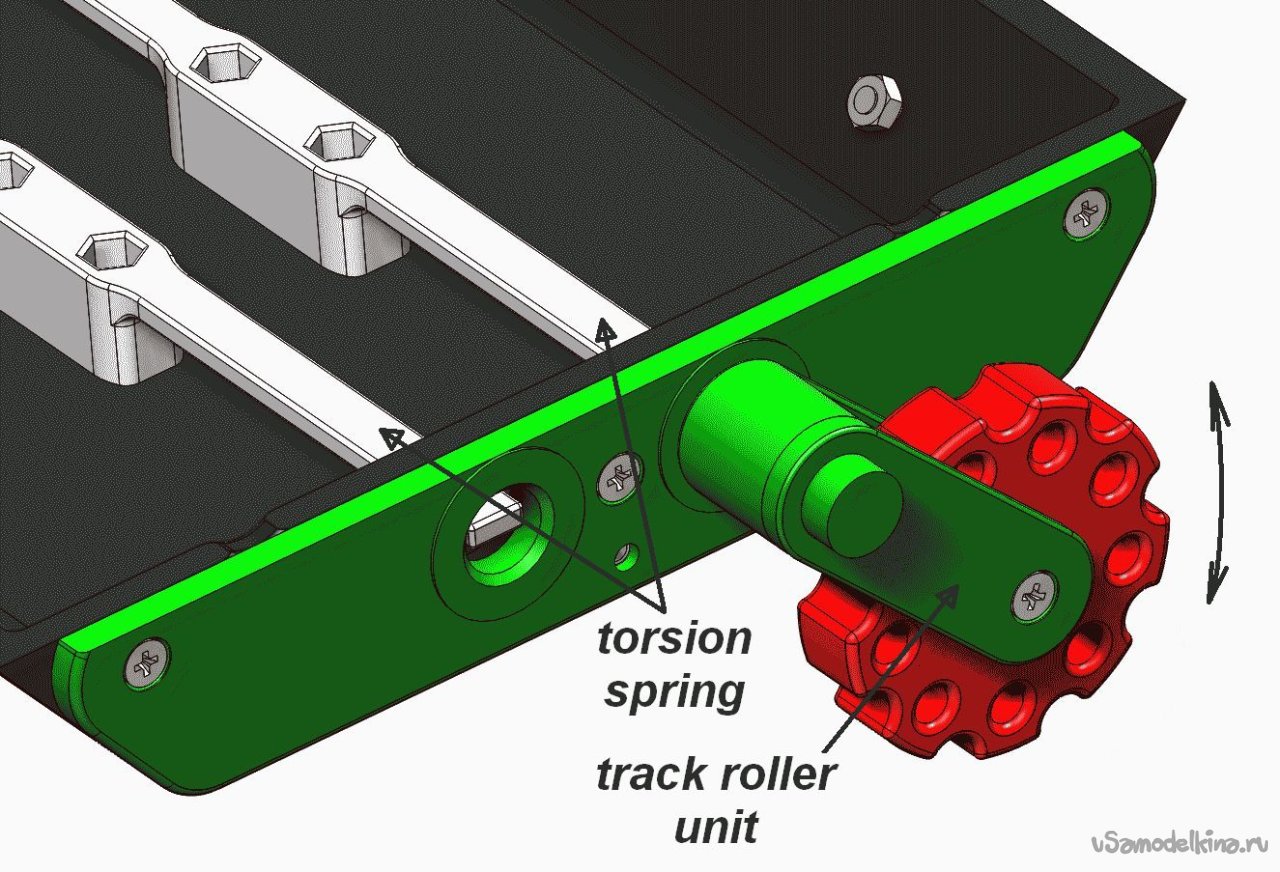
В узлах всех катков ходовой части применены китайские шариковые подшипники 6800Z типоразмера 10х19х5.
Схема и порядок сборки узла опорного (поддерживающего) катка:
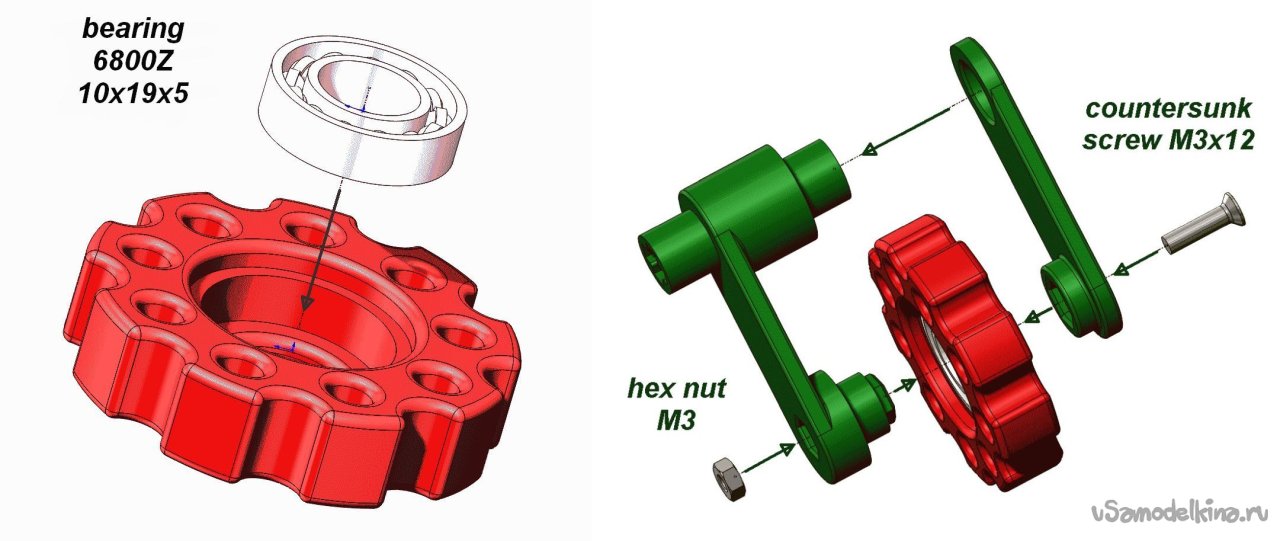
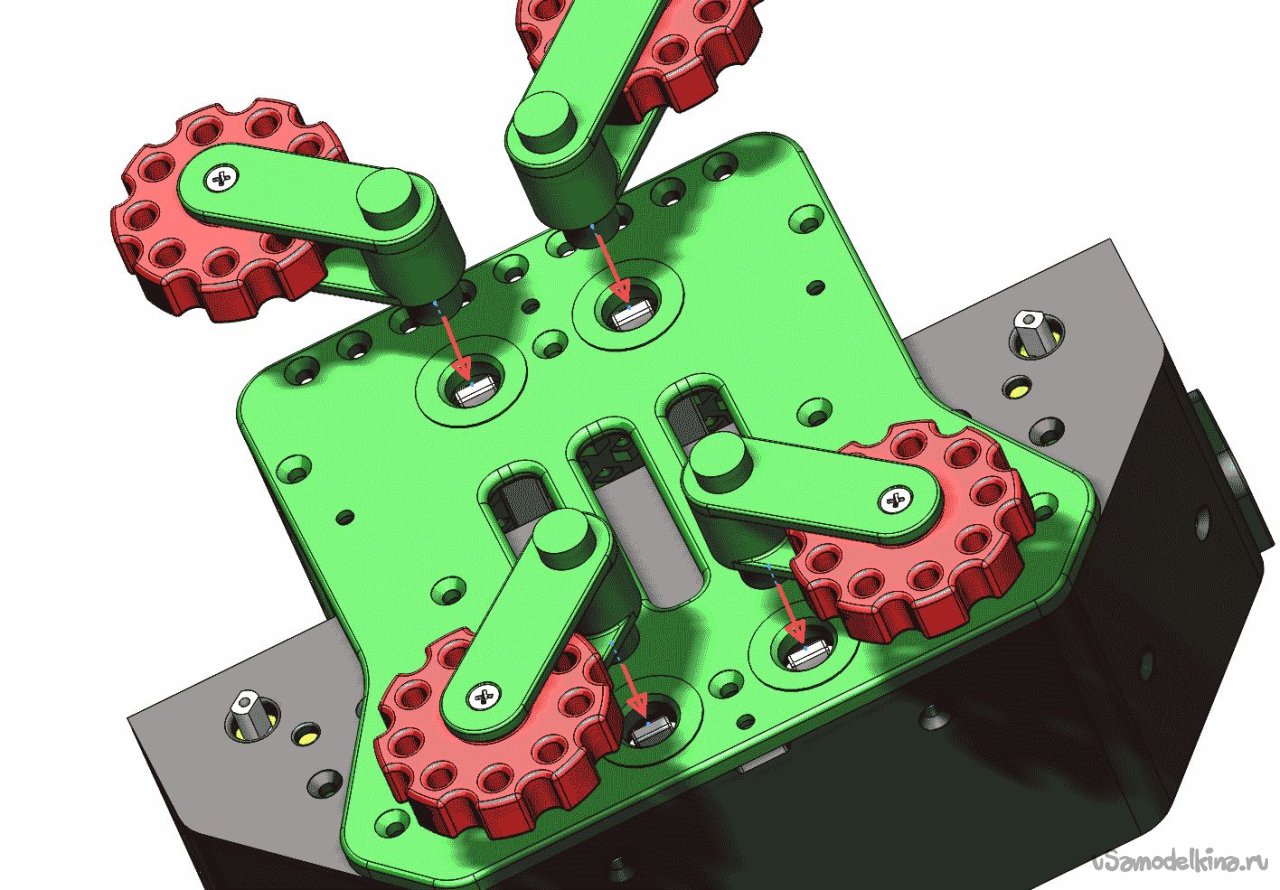
Схема и порядок сборки узла ведущего катка:
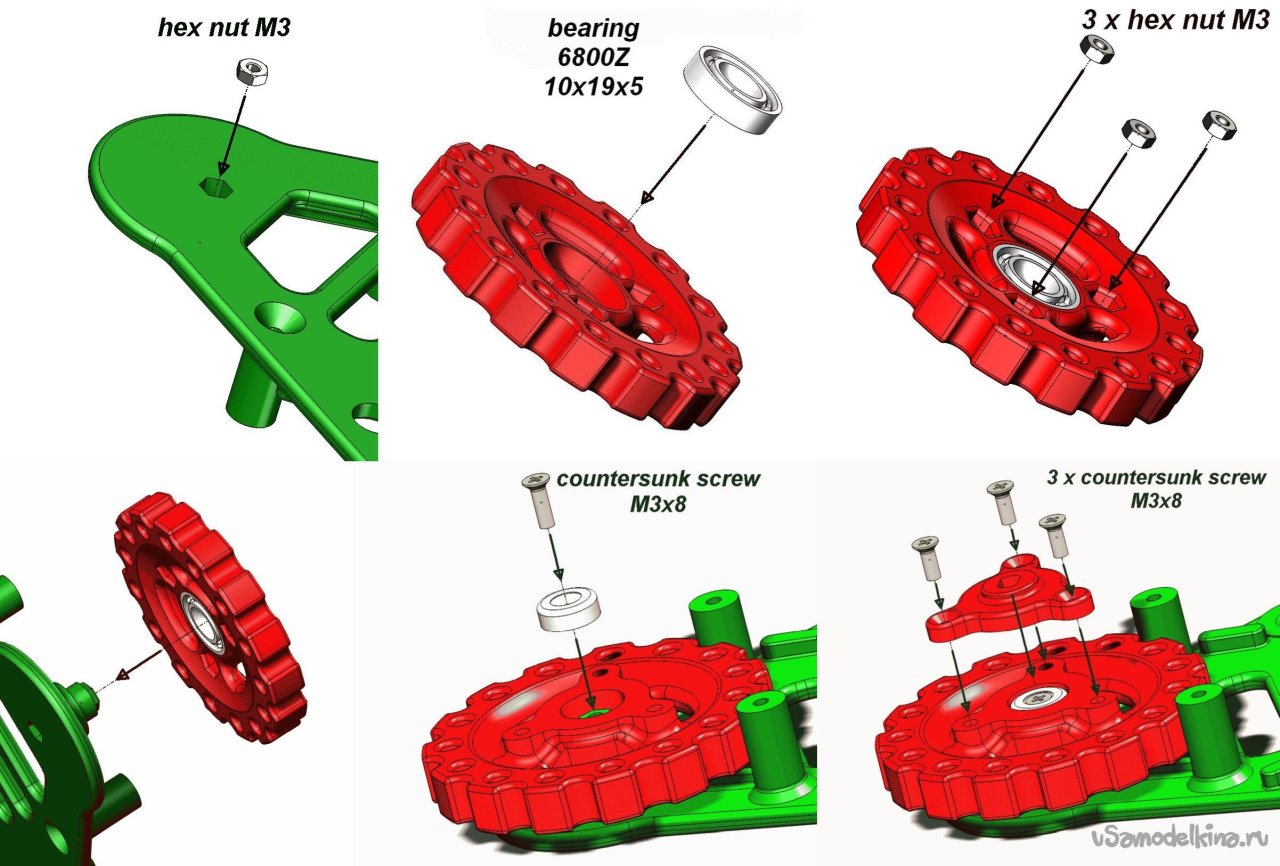
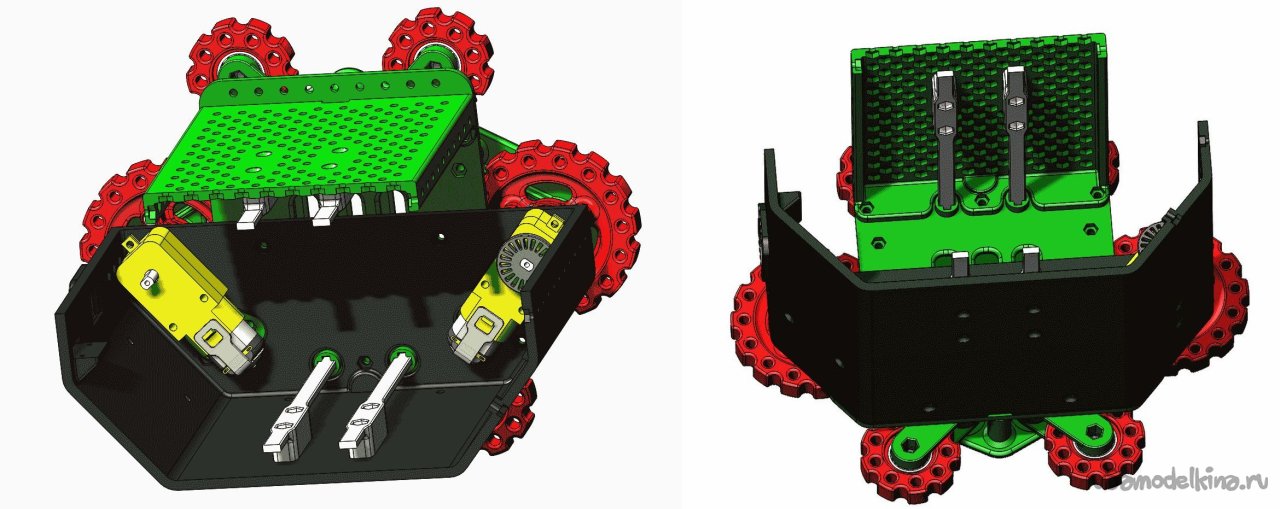
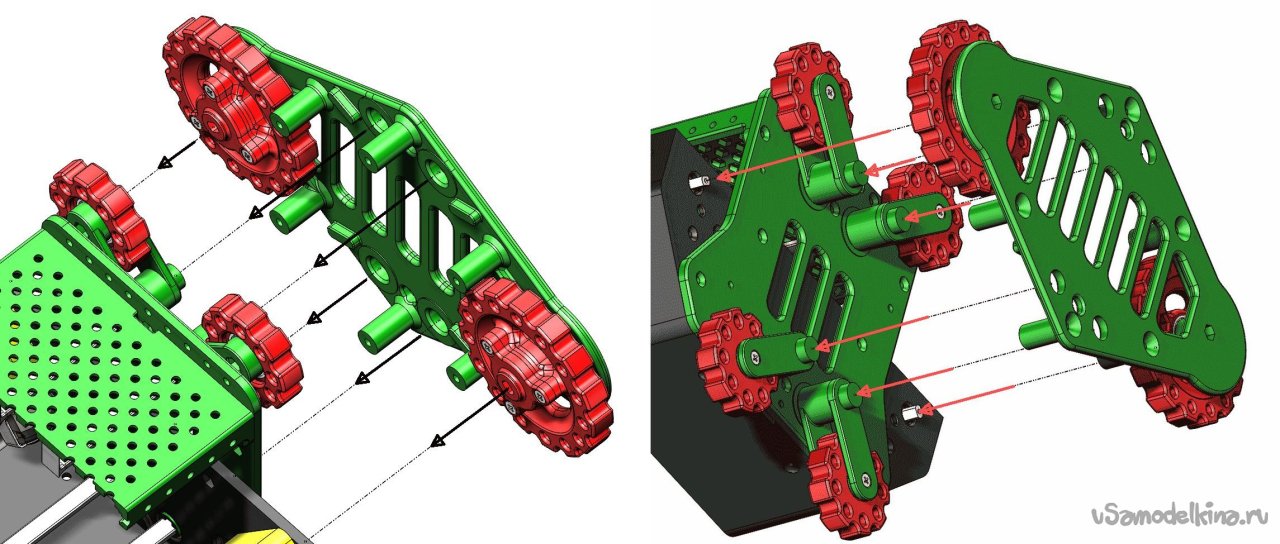
Схема и порядок сборки ходовой части:
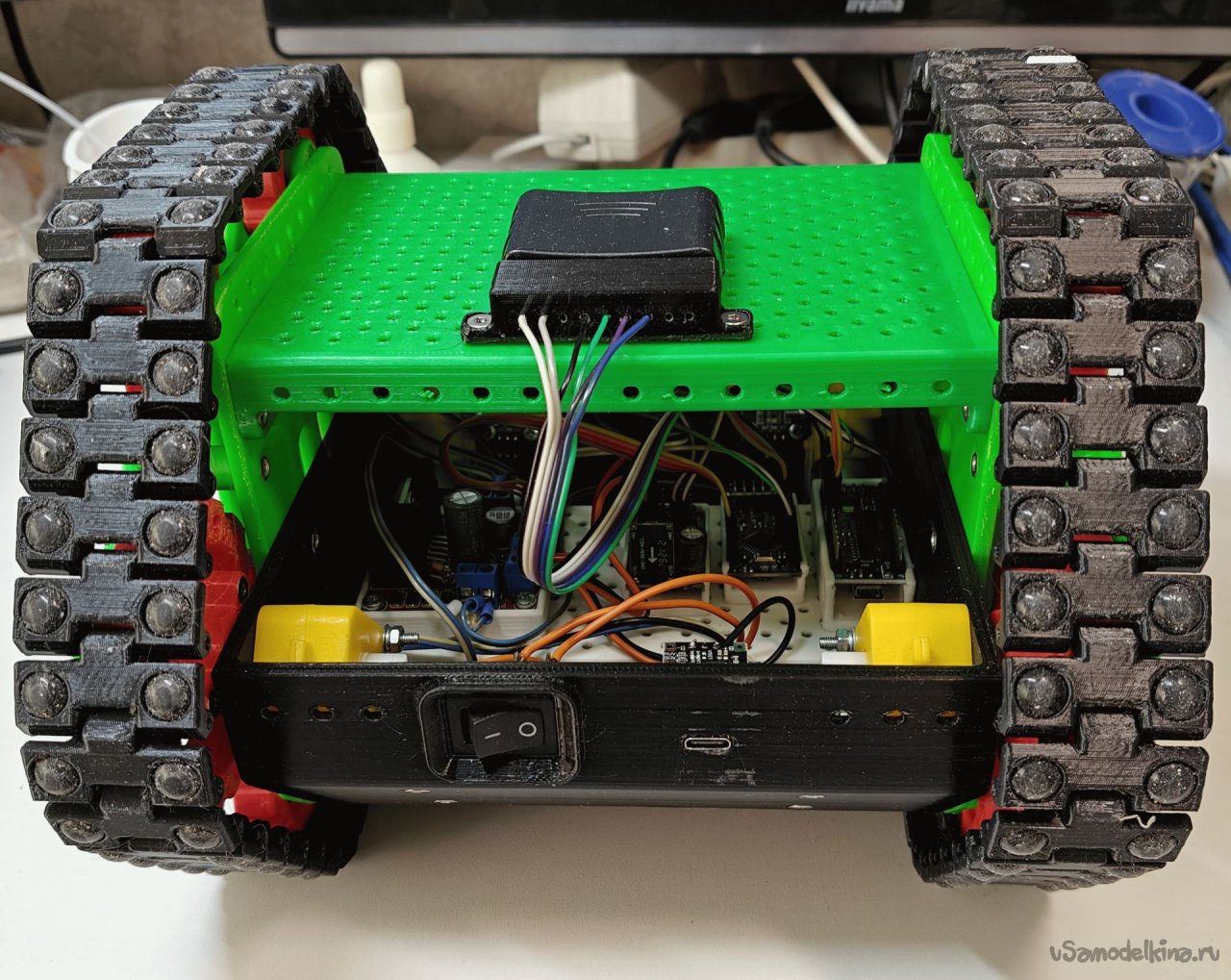
Расположение компонентов внутри корпуса:
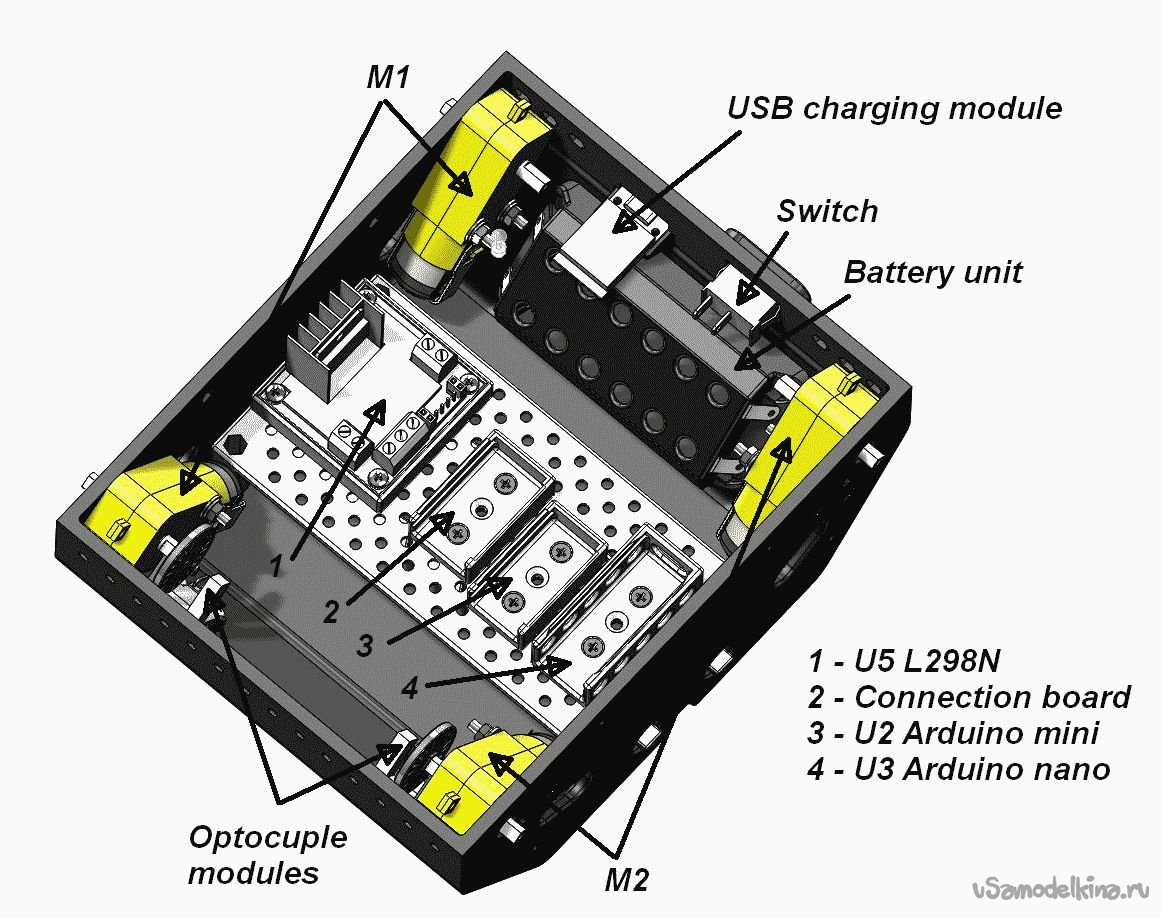
Батарейный отсек:

Система управления.
Принципиальная схема:
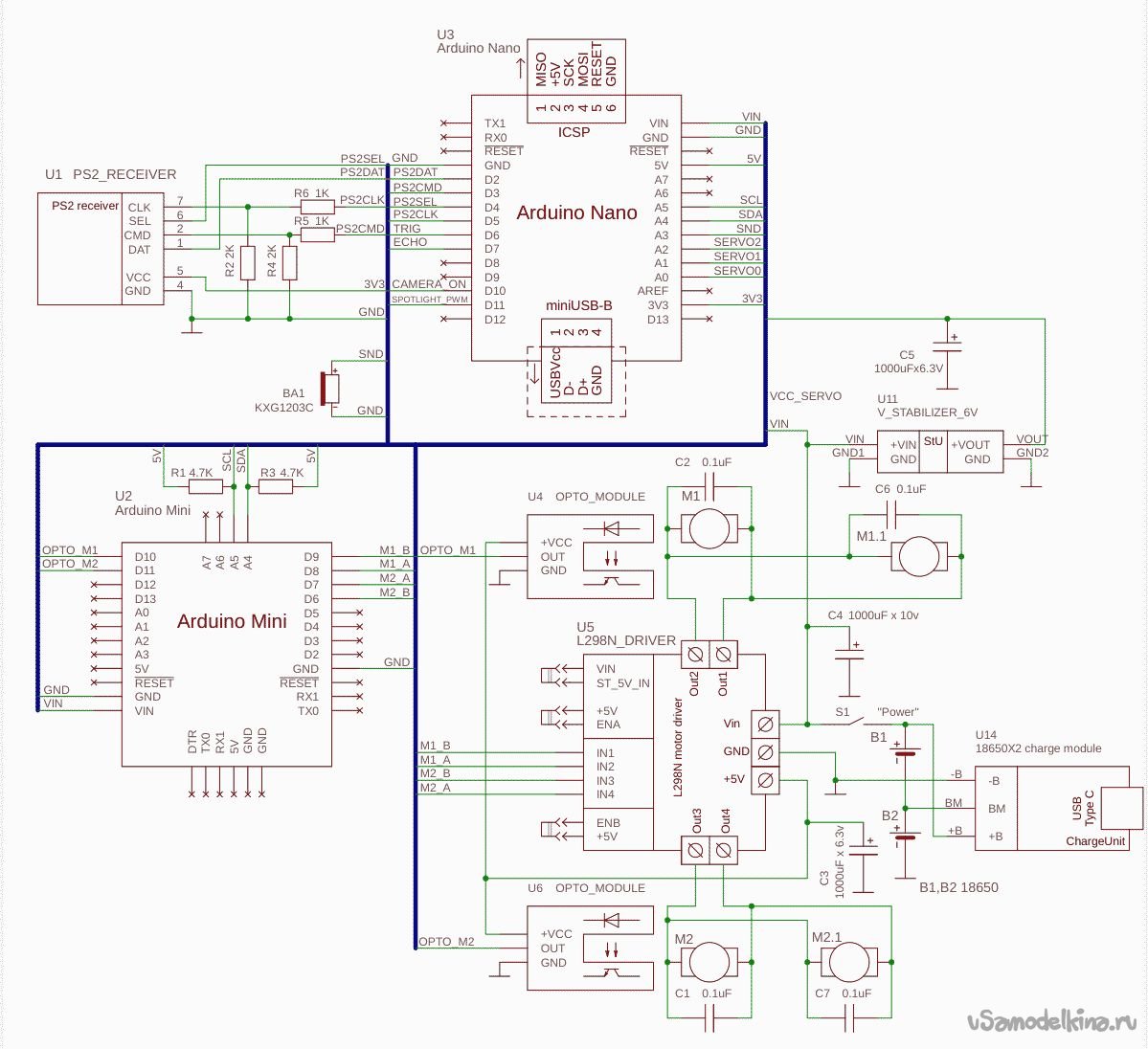
Управление осуществляется посредством пульта от PS2. Левый джойстик управляет левой гусеницей, правый – правой.
Управление движением модели осуществляется банально – по «танковой» схеме, изменением частоты и направления вращения двигателей гусениц посредством пульта от PS2.
В двигателях гусениц применена обратная связь через оптопары U4, U6 и дырчатые диски на валах. Понятное усложнение с лихвой окупается более стабильным управлением движками. Управление моторчиками осуществляется посредством ШИМ, для чего применен модуль U5 с микросхемой 2х-канального Н-ключа L298N и отдельный контроллер U2 “Arduino Mini”.
Основное управление реализовано на контроллере U3 “Arduino Nano”. Этот контроллер осуществляет связь с приемником от PS2 U1 и через канал I2C управляет контроллером двигателей.
Резисторы R1 и R3 – подтяжка сигнальных линий I2C.
Резистивные делители R2, R6 и R4, R5 обязательны, если у вас приемник PS2 с питанием 3,3В, Если приемник с питанием 5В, делители не нужны, и все выводы приемника можно соединять с контроллером напрямую.
Питание модели осуществляется от двух литиевых аккумуляторов типоразмера 18650. Заряд батарей осуществляется посредством модуля зарядки-балансировки U14 через разъем USB Type-C.
Ну и фото с натуры:
Общий вид спереди:
Вид спереди:
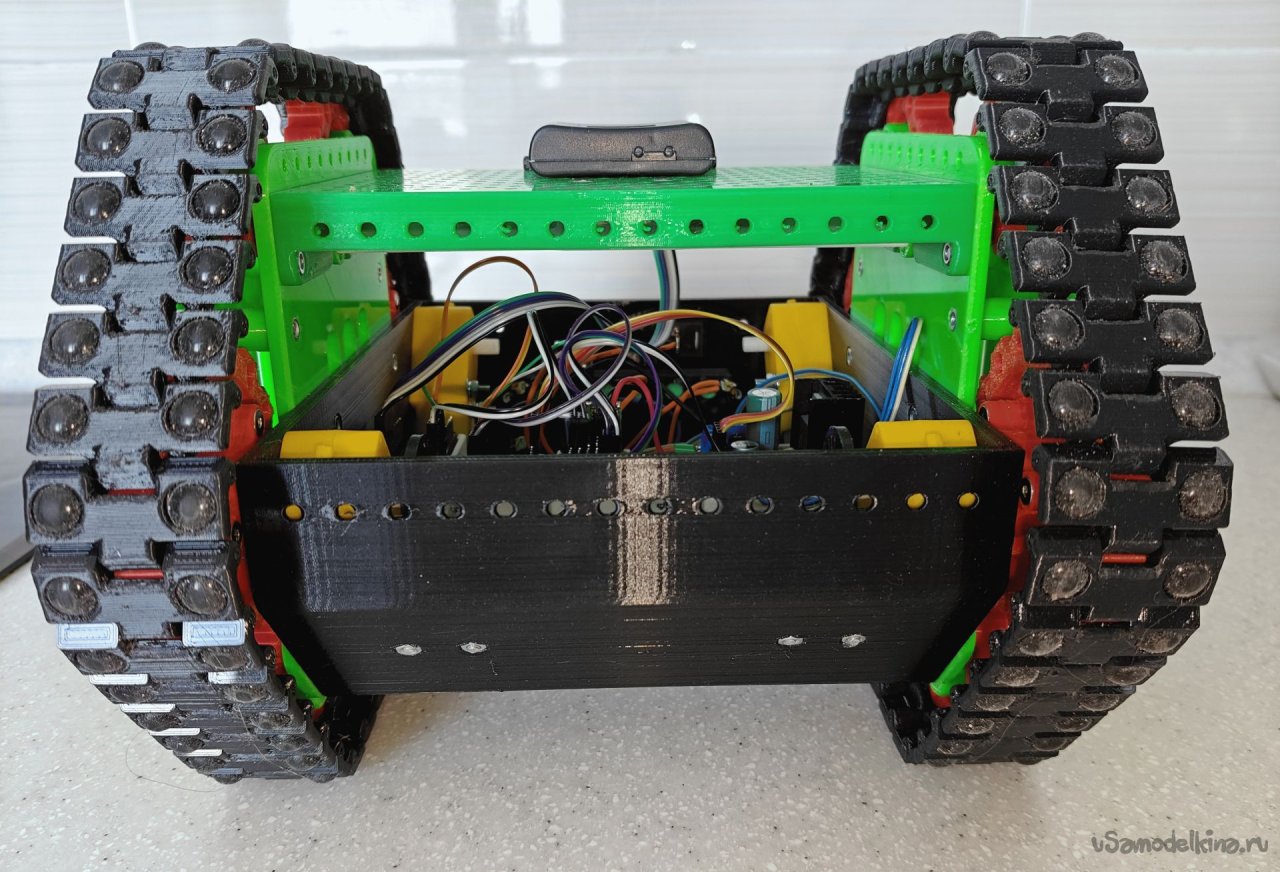
Вид справа:
Общий сзади:
Все файлы моделей для печати можно скачать здесь: https://www.thingiverse.com/thing:7305033 или здесь: https://cults3d.com/:4097412
Ну, вот на этом, собственно говоря, и все. Удачи!

