


Добрый день, на этот раз я хочу поделится инструкцией по изготовления модели тяжелого погрузчика из Lego. Электрификация как обычно – Arduino. Модель сделана на основе Lego 42079 HEAVY DUTY FORKLIFT. Мозгом нашей модели будет Arduino Nano v3, управление по каналу Bluetooth. Для управления можно будет использовать андроид телефон или планшет, или другую плату Arduino с подключенным Bluetooth модулем.
Видео самодельного погрузчика:
Список всего необходимого довольно велик:
- Lego Technic 42079 или 42029
- Lego Technic 42033
- Arduino Nano v3 AT Mega 328
- Драйвера двигателя L9110S 2 шт.
- Сервопривода SG-90
- Bluetooth модуль HC-06, HC-05 или аналог
- Мини мотор-редуктор 50 об/мин
- Мини мотор редуктор 100 об/мин
- Мотор редуктор 6v 150 об/мин
- Светодиод белый 2 шт.
- Резистор 150 Ом 2 шт.
- Конденсатор 10v 1000uF
- Однорядная гребенка PLS-40
- Катушка индуктивности 68мкГн
- 4 NI-Mn аккумулятора 1.2v 1000mA
- Коннектор папа-мама двух контактный на провод
- Хомутик
- Провода разных цветов
- Припой, канифоль, паяльник
- Батарейка A23 или A27
- Болтики 3х20, гайки и шайбы к ним
- Болтики 3х40
- Болтики 3х60
Шаг 1 Собираем корпус.
Для начала необходимо скачать инструкцию Lego 42079 с официального сайта:
Открыв инструкцию Lego, собираем все пункты с 1 по 40 включительно. Не ставим только шестерни (они будут мешать), дифференциал, колен вал. Далее выполняем шаги с 56 до 75 включительно. Должна получиться такая основа:
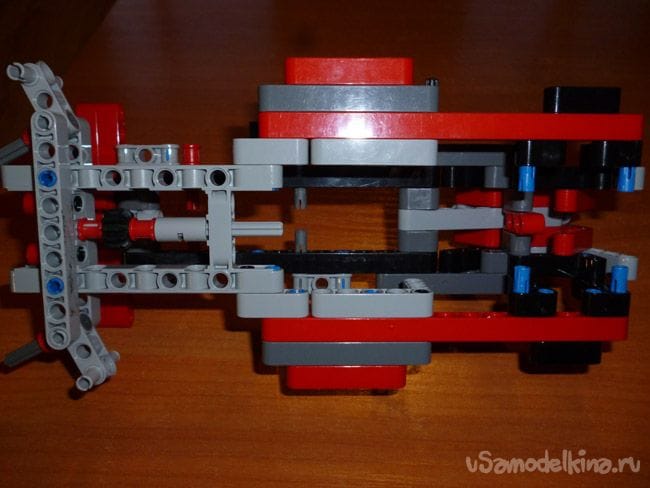

Затем выполняем шаги с 95 по 15 включительно. Получаем следующее:
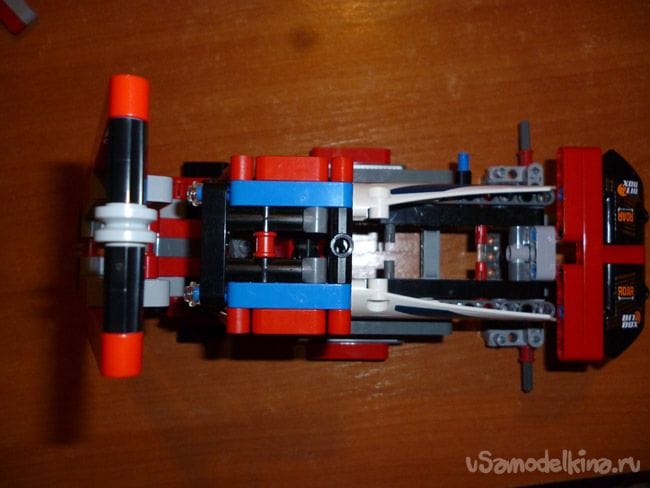
И вид спереди:

Наклонный механизм немного переделываем как на фото:

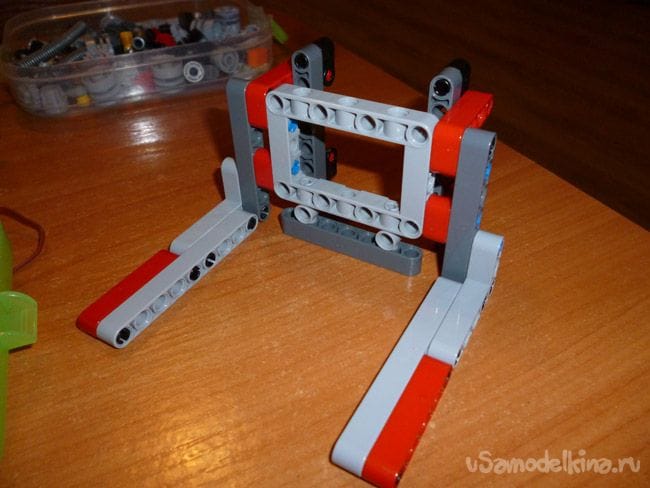
Собираем вилы, это шаги 183 по 192. Получаем:
Добавляем детали по Lego инструкции шаги со 116 по 158 включительно:

И снизу выглядит так:

Так же следует собрать поддон по фотографии:

Шаг 2 Добавляем двигатели.
Для осуществления движения ведущей оси возьмем мотор редуктор со скоростью вращения 150 об/мин и 6 вольтовым моторчиком. Выходные валы редуктора подрезаем, придавая им форму стандартной леговской детали:

Придавая валам форму крестов, пробуйте надевать соединительные втулки lego. Когда соединительные втулки наденутся на достаточную глубину, вставляем мотор-редуктор в корпус, как показано на фото. И сразу надеваем колеса:
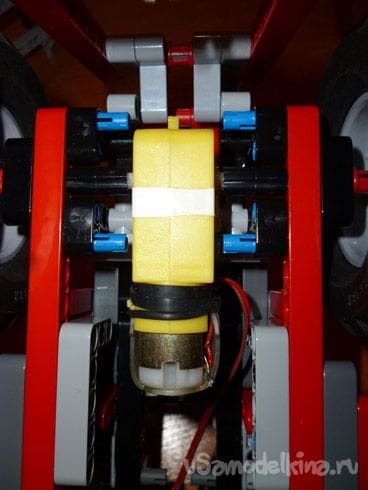
Сам мотор-редуктор прикручиваем к корпусу используя болтики 3х60.
Теперь переходим к поворотному механизму. Для него нам понадобится сервопривод SG-90. Лучше выбирать с металлическими шестернями. Для начала нам необходимо отрезать выступающие детали корпуса, предназначенные для крепления сервопривода. А также в нижней части корпуса проделать сквозное отверстие. Можно использовать сверло 3мм, или просто ножом вырезать, главное делать это аккуратно, чтобы не повредить внутренности сервопривода:

Для соединения с lego деталями, возьмем самый маленький рычаг от сервопривода и прикрутим к нему маленькую lego деталь. Должно выглядеть так:

Надеваем получившуюся деталь на сервопривод:

Сервопривод крепим в нижней части модели, примерно посередине. Для крепления используем болтик 3х60. Затем вставляем lego вал и надеваем на него шестеренку, которая осуществляет поворот колес:

Надеваем все четыре колеса:

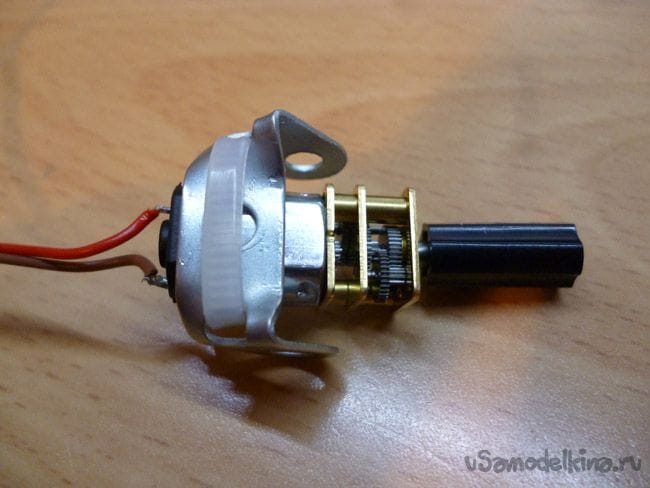
Переходим к подъемному механизму. Для него берем мини мотор-редуктор со скоростью 50 об.\мин. Выходной вал такого мотор-редуктора 3мм, он хорошо подходит для леговской соединительной втулки. Надо только вставить кусочек спички для фиксации. А также согнуть деталь от металлического конструктора, как показано на рисунке, для крепления моторчика к lego:
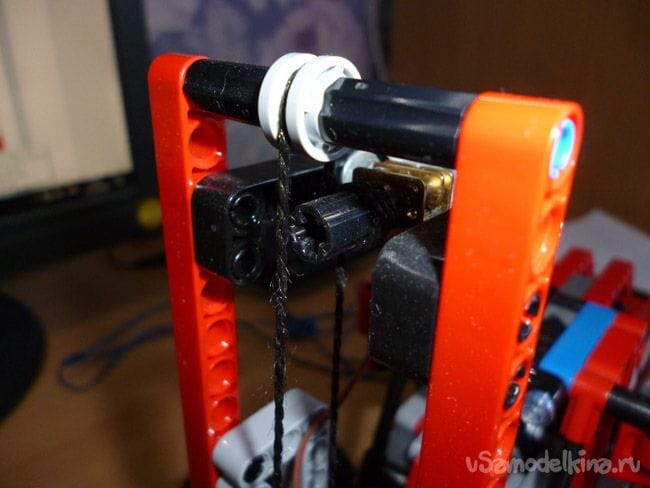
Теперь ставим мини мотор-редуктор в верхней части подъемного механизма, как показано на фото. Берем толстую нити, прокидываем ее через верхний ролик, потом наматываем на соединительную втулку от моторчика (оборота три-четыре) и пропускаем через нижний ролик. Должно получиться так:
Надеваем вилы на нашу конструкцию, и привязываем концы ниток к вилам:
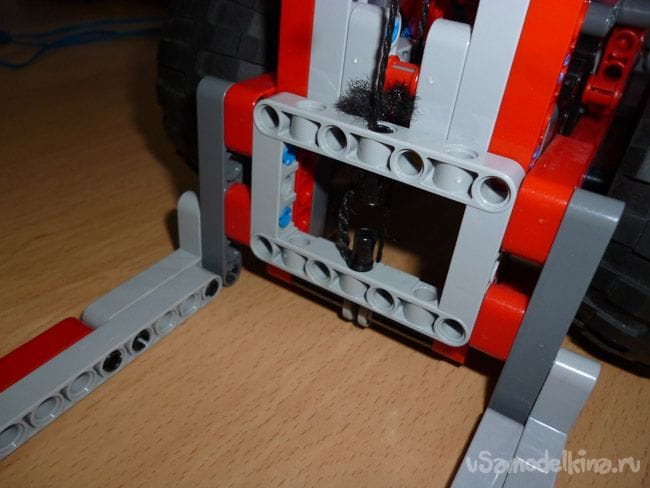
Весь подъемный механизм в сборе выглядит так:

А сейчас переходим к механизму наклона. Для него берем сервопривод SG-90. Желательно со сгоревшей электроникой. Разбираем его и вынимаем плату контролера, припаиваем провода напрямую к моторчику. Разбираем дальше и вынимаем самую большую шестерню, отрезаем у нее ограничительные выступы снизу и ставим на место. Так же следует отрезать выступы для крепления и проделать отверстия, как и в первом сервоприводе. Переделанный сервопривод крепим к леговской детали:

Механизм ставим внутрь кабины:

А его конец крепим к подъемному механизму:

Шаг 3 подготовка среды программирования.
Редактирование и заливка скетчей производится через Arduino IDE. Данную программу необходимо скачать с официального сайта и установить.
Затем необходимо добавить в среду программирования две библиотеки, которые используются в скетче. Servo.h библиотека для работы с сервоприводами, а SoftwareSerial.h для создания программного канала связи с Bluetooth модулем:
Скачанные и распакованные архивы надо переместить в папку «libraries», находящуюся в папке с установленной Arduino IDE. Можно пойти и другим путем, а именно не распаковывая архивы, добавить их в среду программирования. Запускаем Arduino IDE, выбираем в меню Скетч – Подключить библиотеку. В самом верху выпадающего списка выбираем пункт «Добавить .Zip библиотеку». Указываем место нахождения скачанных архивов. После всех действий, необходимо перезагрузить Arduino IDE.
Шаг 4 Bluetooth модуль.
Мы возьмем один из наиболее доступных на сегодня Bluetooth модулей - HC-05 или HC-06. Их полно как в китайских магазинах, так и на российском рынке. Отличий у них не так много: НС-05 может работать, как в режиме ведущего (slave), так и в режиме ведомого (master). НС-06 является только ведомым устройством.
Вкратце характеристики модулей:
- чип Bluetooth – BC417143 производства
- протокол связи – Bluetooth Specification v2.0+EDR;
- радиус действия – до 10 метров (уровень мощности 2);
- совместимость со всеми Bluetooth-адаптерами, которые поддерживают SPP;
- объем flash-памяти (для хранения прошивки и настроек) – 8 Мбит;
- частота радиосигнала – 2.40 .. 2.48 ГГц;
- хост-интерфейс – USB 1.1/2.0 или UART;
- энергопотребление – ток в течение связи составляет 30-40 мА. Среднее значение тока около 25 мА. После установки связи потребляемый ток 8 мА . Режим сна отсутствует.
Для корректной работы модуля требуется провести настройку перед подключением. Настройка производится подачей AT командам, вводимых в окне терминала. Мы будем настраивать HC-05. Для других модулей команды могут быть другими. Соединять компьютер и Bluetooth модуль будем через Arduino. Заливаем следующий скетч в arduino:
Этот скетч нужен для отправки AT команд на Bluetooth модуль. Arduino просто передает все написанное в терминале на модуль связи Bluetooth. Сейчас и в дальнейшем мы будет подключать модуль через библиотеку SoftwareSerial. Ссылка на ее скачивание и инструкция по установке была в предыдущем шаге. На больших скоростях библиотека работает нестабильно. При возникновении проблем со скоростью связи, можно подключить модуль напрямую к RX и TX контактам Arduino. Не забудьте в этом случае подправить скетч. В данном случае мы будем работать с модулем на скорости 9600. Итак, после заливки скетча, открываем окно терминала и вводим следующие команды:
«AT» (без кавычек) должен прийти ответ «OK» (значит всю подключено верно и модуль работает)
«AT+BAUD96000» (без кавычек) должен прийти ответ «OK9600».
Если пришел нужный ответ, переходим к следующему шагу.
Шаг 5 Управляющая электроника.
Для оживления нашей модели будем использовать Arduino Nano v3 и Bluetooth модуль, а также два драйвера двигателей L9110S.
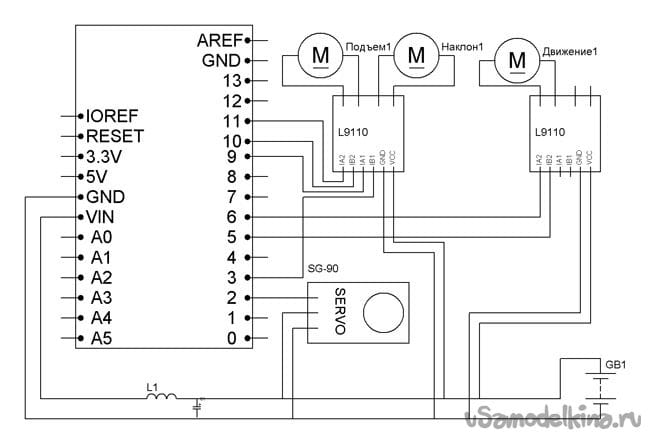
Для соединения компонентов будем использовать провода с разъемами «мама» Dupont на концах. Для питания можно испробовать два варианта. Первый: 6 NI-Mn аккумулятора 1.2v 1000mA спаянных последовательно, питание и Arduino и двигателей тогда от них. Для Arduino в цепь питания необходимо включить конденсатор 10 В, емкостью побольше, а также катушка индуктивности. Это нужно для стабилизации питания микроконтроллера. Для фонарей подключите аноды двух светодиодов к 4 pin Arduino, катоды к GND. Резисторы следует подбирать под используемые светодиоды. Второй вариант: раздельное питание. Тогда для двигателей используем все те же аккумуляторы, смотанные изолентой:

А для Arduino батарейку A27 или A23:

Для надежности поместить батарейку в термоусадку.
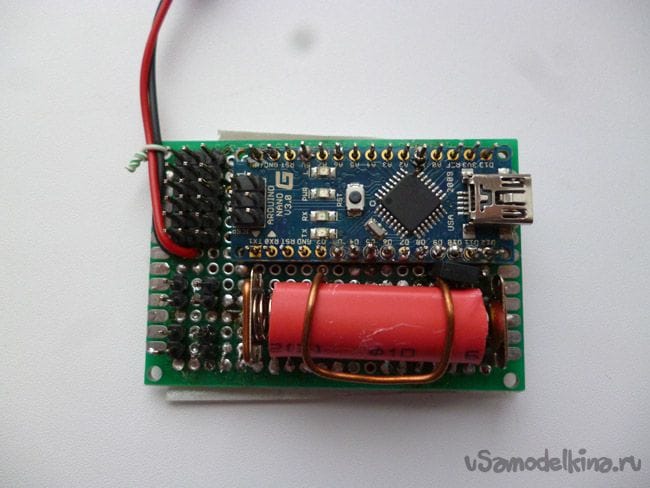
Можно конечно все соедините по схеме просто на «весу», но лучше сделать это все на монтажной плате. Сверху впаиваем Arduino Nano, место для батарейки и выводы для питания других элементов:

Ставим батарейку на предназначенное для нее место:
Снизу можно все распаять дорожками, но быстрее просто проводами в изоляции:

Снизу к этой плате крепим и спаиваем контакты драйверов:
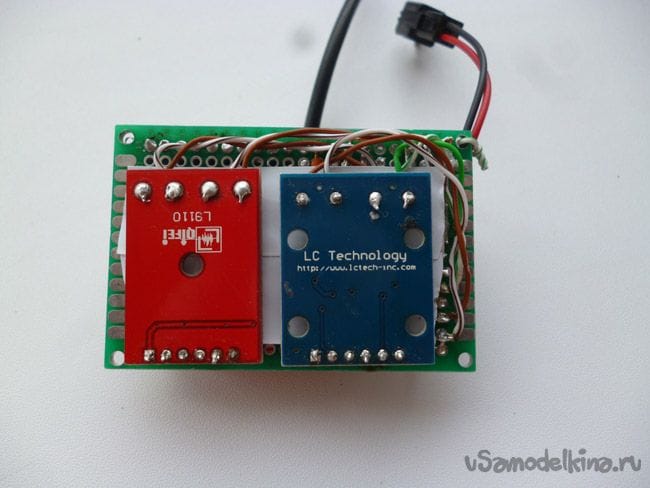
Получается компактно и надежнее проводов.
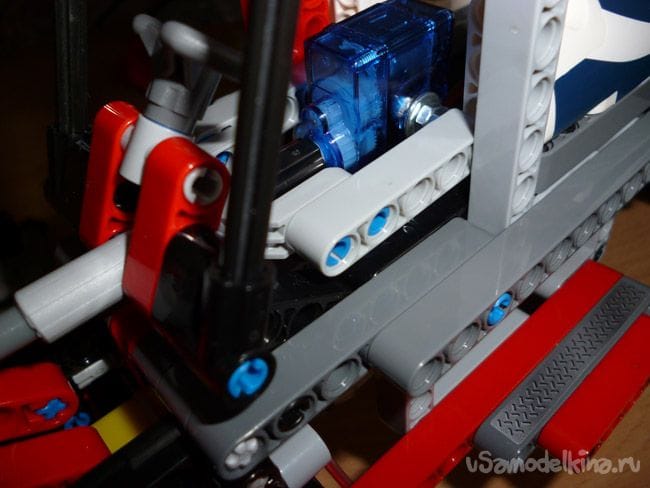
Всю электрику размещаем сзади кабины:

Аккумуляторы крепим ниже:
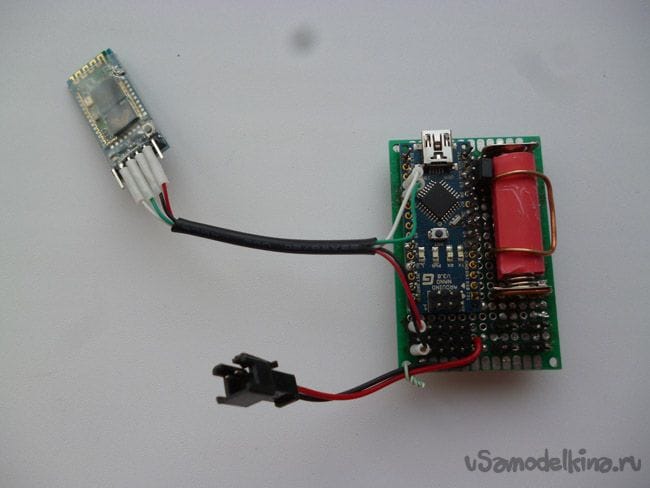
Подключаем Bluetooth модуль следующим образом:
Arduino Nano - Bluetooth
D7 – RX
D8 – TX
5V – VCC
GND –GND
И размещаем плату вместе с модулем в предназначенном для них месте:

Шаг 6 Настройка пульта управления.
В качестве пульта можно использовать Android телефон или планшет, компьютер под управлением Windows или сделанный собственноручно пульт на arduino. Начнем с варианта на Android, для этого потребуется установить программу управления роботом по каналу Bluetooth. Вводим в Google play «Bluetooth Arduino» и устанавливаем понравившуюся программу. Я рекомендую BT Controller. Затем, через настройки Android, устанавливаем соединение с Bluetooth модулем. Пароль для соединения «1234» или «0000». Далее провести настройку программы на соответствующие команды. Список приведен ниже.
Следующий вариант – компьютер на Windows. Можно использовать окно термила для отправки команд или воспользоваться удобной программой Z-Controller. Выберете порт (com порт через который происходит соединение) и настрой клавиши на команды. Настройка простая и не займет у вас много времени.
И наконец третий вариант, и на мой взгляд лучший, использование физического пульта, так как тогда чувствуется нажатие кнопок. Советую изготовить пульт, следуя моей инструкции.
И добавить в него Bluetooth модуль.
Команды управления, следующие:
W – вперед
S – назад
A – влево
D – вправо
F – стоп
G – руль прямо
K – включение фар
L – выключение фар
R –подъемник вверх
E – подъемник вниз
Q – подъемник стоп
T – наклон на себя
Y – наклон от себя
H – стоп наклонного механизма





Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.


