Решил позаниматься отложенным проектом. Название у него «индивидуальное средство передвижения», или «электрический велосипед на одном колесе», или «электрический моноцикл», кому как понравится.
Рама моноколеса получилась вроде, как и ничего, ее переделывать не планирую. Широкие педали позволяют комфортно стоять, правда, имеется недостаток, они не складываются и по этому, имеют габарит. Руль тоже не складной, это надо исправлять, но позже, как передачу вращения электродвигателя на колесо. Пробуксовка ремня будет всегда ронять меня на асфальт. Только жесткая передача через шестерню или цепь доведет проект до конца. А еще необходимо, и это в первую очередь, поработать «над мозгами» изделия.



Короче информации будет много, в одной статье все не расскажешь, поэтому буду информировать поэтапно. Кому это покажется интересным, мы закончим проект вместе, а кому нет, могут эту тему пропустить.
[media=https://www.youtube.com/watch?v=AQdsQb2ml60]
Первое, что мне необходимо, это оттолкнуться с мертвой точки, что бы пошло движение проекта, как я ранее сказал, необходимо доработать мозги моноколеса. Напомню, двигатель все тот же, коллекторный, над BLDC мотором пока работаю, когда будет готов, заменю. Драйвер двигателя BTS7960 43А не оправдал мои ожидания, да и sketch которым воспользовался, (не учился я их писать, а сейчас уже и поздно), тоже загнал меня в тупик. При небольшом наклоне моноцикла электродвигатель не вращался, пока подаваемое напряжение не подымится и откроет мосфет. А когда двигатель начинал толкать конструкцию, «дребезг» гироскопа резко разгонял мотор и тут же тормозил. Поэтому решил пойти другой дорогой, собирать буду так, как понимаю и желательно в бюджетном варианте.
Электрический моноцикл работает так, при наклоне вперед, гироскоп включает двигатель и колесо подъезжает под наездника, стараясь вернуть вертикальное положение. Чем сильнее наклоняем моноцикл, тем мощнее и быстрее реагирует мотор. При наклоне в противоположную сторону, происходит торможение.
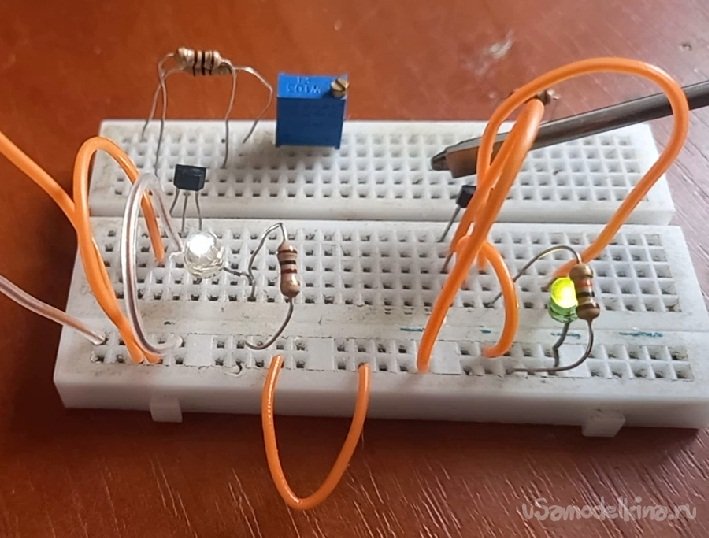
В моем случае управлять коллекторным двигателем будет простенький ШИМ регулятор на NE555. О схеме сказано в интернете много, поэтому пересказывать, что и как в ней работает, не буду. Монтаж накидал на макетной плате из микросхемы, двух конденсаторов, двух резисторов, двух диодов и переменного резистора, незамысловатая схема, сразу заработала, когда подключил питание. На выходе присутствовал регулируемый сигнал который можно подавать на мосфет управления двигателем. Порывшись в кладовке, нашел готовую плату от конструктора мигалки на NE555. Подобрал на ней подходящие дорожки, впаял детали с макетной платы.

Следующим шагом, нужно было подружить собранный ШИМ с контроллером Arduino и гироскопом MPU-6050 (GY-521). Прошлый скетч самобалансировки нуждался в доработке, поэтом воспользовался готовым скетчем для серводвигателя. После загрузки в Arduino программы, при наклонах гироскопа, серводвигатель начал реагирует на наклоны поворотом якоря. Прикольно так получилось.
Чтобы ШИМ заработал с Arduino сначала хотел к поворотному рычагу сервомотора на некой тяге подключить плоский переменный резистор, тяга перемещала бы ползунок меняя сопротивление, но на сколько его хватит? Одно дело в аппаратуре, подвинул ползунок потенциометра и наслаждаешься музыкой. Другое дело на транспорте, где надо при движении то ускориться, то притормозить. Постоянно шоркать ползунком необходимо, контакты подработаются, появятся помехи как в динамиках и этот вариант отпал.

Подумал о цифровом потенциометре, не мой случай, у него 256 подключений надо, чтобы выйти от «0» на те же 50 Ком. В моем же случае нужно всего лишь три-четыре подключения по прямому ходу моноколеса и один в реверс, тормоз.

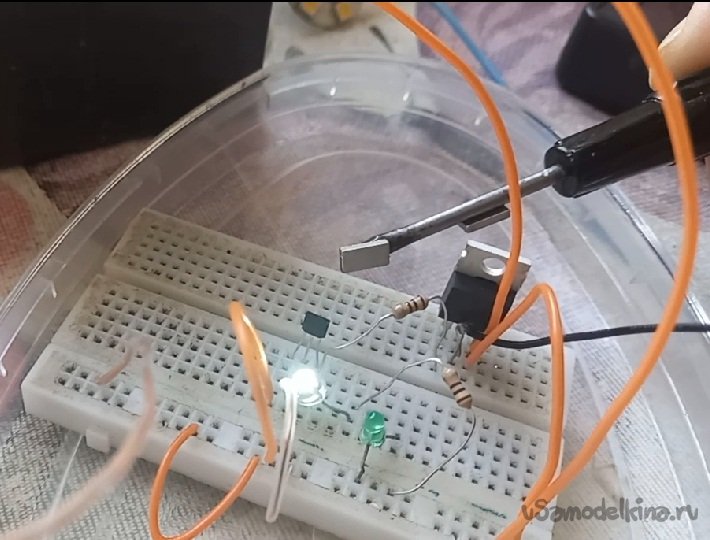
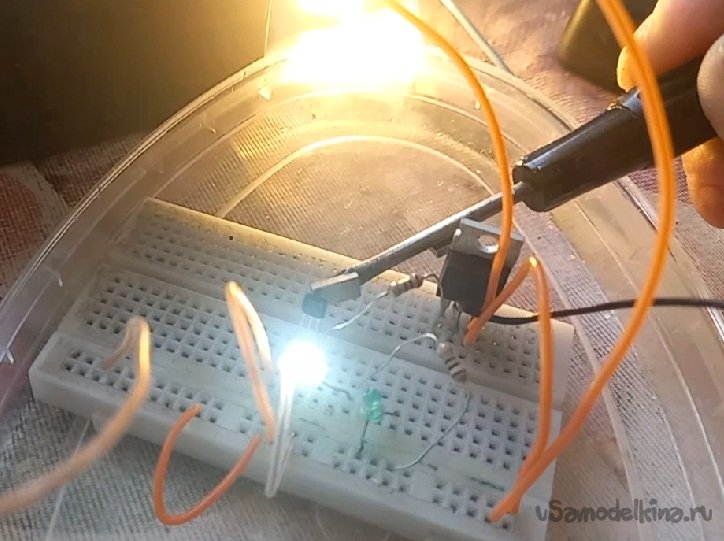
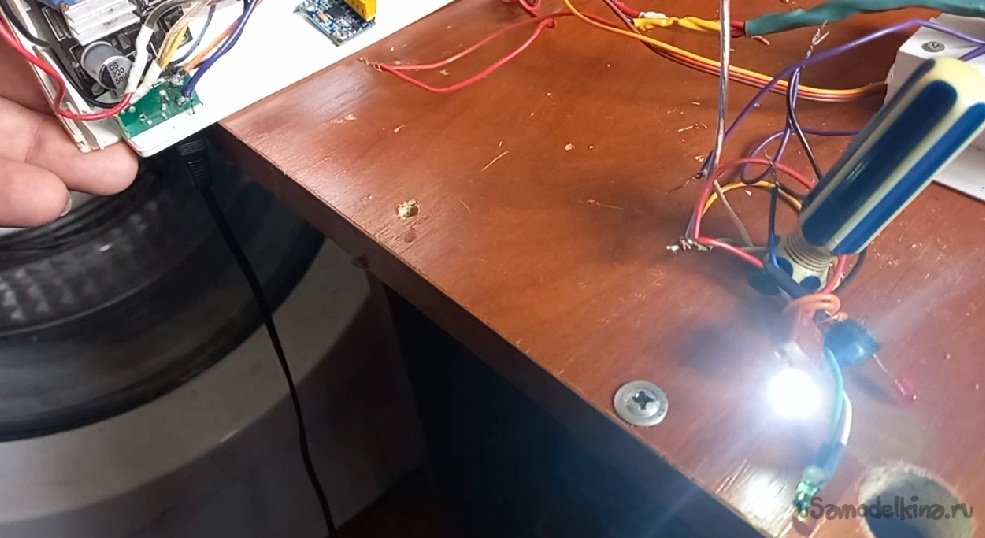
Решил задействовать датчики Холла SS49E для ступенчатого переключения переменного резистора , а что никакого механического воздействия, моментальное срабатывание. У него интересный эффект включения, при подсоединении питания 5 вольт, на выходе датчика присутствует напряжение 2.5 вольта. При воздействии магнитным полем один полюс подымает напряжение, другой полюс отключает напряжении. При плавном перемещении магнита, подключенные светодиоды через мосфет, плавно увеличивают или уменьшают яркость. Ну прям готовый вариант управления двигателем, вот только очень короткий шаг и я не стал отказываться от переменного резистора.
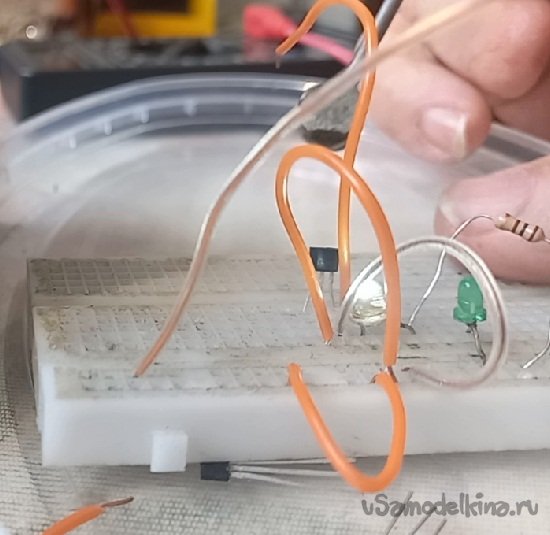
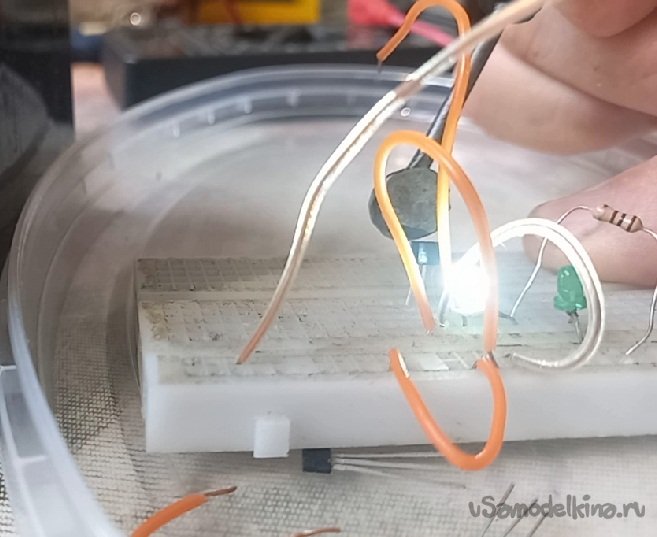
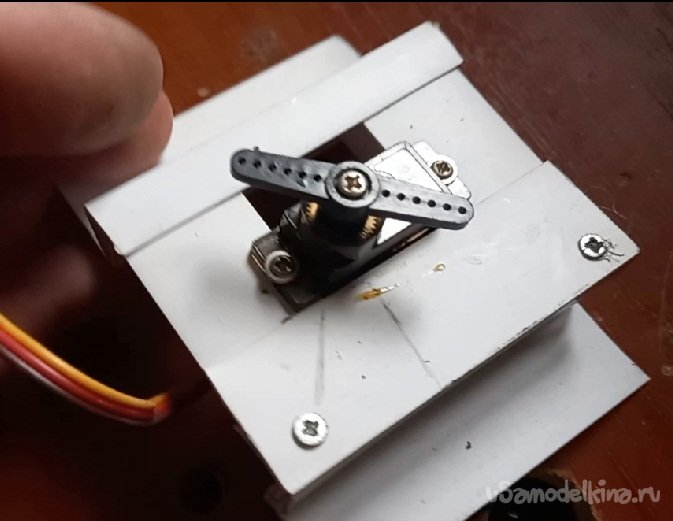
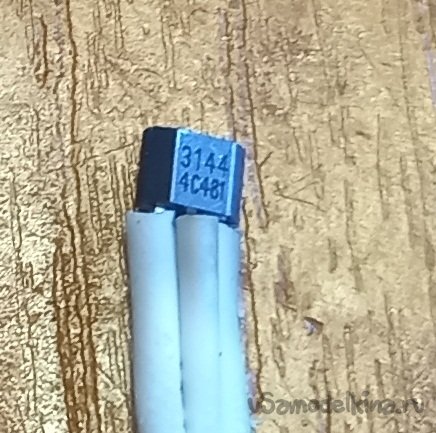
Для этого взял датчик Холла А3144. Они при попадании в магнитном поле на выходе выдает ноль. На пластинку пластика друг за другом закрепил датчики, к концам подключил светодиоды. Над ними на поворотном рычаге вклеил три небольших магнита с чередованием полярности. Средний магнит открывает датчик, крайние закрывают.



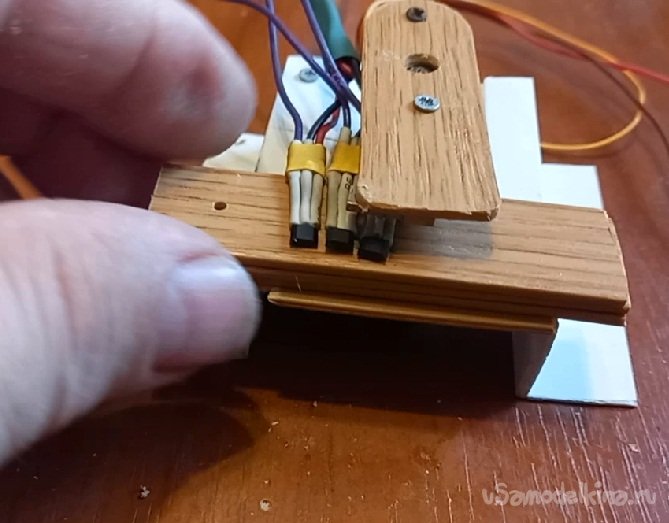
При наклоне гироскопа, серводвигатель вращаясь перемещает магниты над датчиками Холла, чем сильнее наклон, тем дальше загорается светодиод.

Чтобы не было двойного срабатывания датчиков Холла, это когда например первый датчик еще не вышел из магнитного поля, а второй уже попал и присутствуют сразу два сигнала на исполнительное устройство, применил транзисторы PNP. Они подключены так, чтобы при включении следующего транзистора, он мог отключать предыдущий, если управляющий сигнал еще присутствует. Диоды отсекают «0» от баз транзисторов.
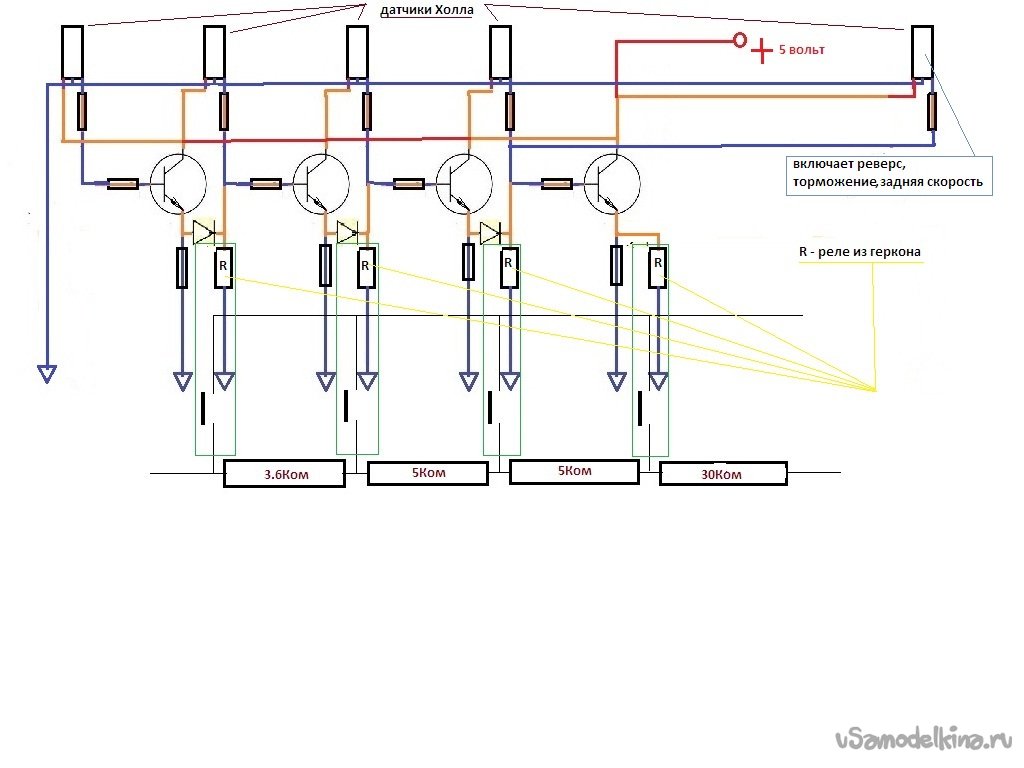

Завершающим этапом в моем переменном резисторе, это применение небольших реле для подключения в местах соединения резисторов собранных последовательно. Первое подключение должно создавать имитацию положения ползунка 30 Ком, второе – 20 Ком, третье 10, четвертое 0. Ступенчатое смена сопротивления потенциометра, значительно убирает дребезг датчика гироскопа и электродвигатель работает без рывков. Реле можно приобрести в магазине, а можно, если есть в наличии рабочие герконы сделать самому. У меня от какой то клавиатуры валялись в кладовке и я не стал тратить копеечку, а изготовил их сам

Сначала из картона ножницами вырезал кружки R-10 мм. Затем с помощью клейкой бумагой скрутил геркон и спичку. В кружках картонных сделал отверстия и склеил катушки. Спичку зажал в патроне шуруповерта и закрепив начало провода намотал до полного заполнения катушки. Провод 0.2 мм, нагрев при двенадцати вольтах отсутствует, а геркон срабатывает даже при 1.2 вольтах.






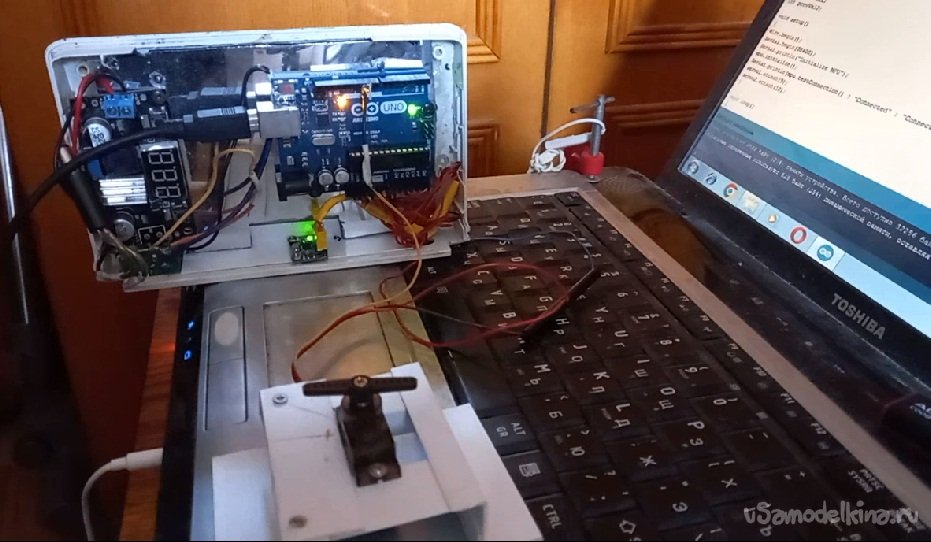
Подключив концы катушек к транзисторам, а концы герконов к резисторам получил электро-механический переменный потенциометр для ШИМ способный работать в связке с Arduino UNO и гироскопом MPU-6050 (GY-521) и управлять коллекторным электродвигателем при самобалансировке.
То есть, при вертикальном размещении гироскопа, сигнала с датчиков Холла нет. При легком наклоне, срабатывает первый датчик и ШИМ включает электродвигатель наполовину мощности. При более глубоком наклона гироскопа, включается другой датчик, ШИМ наваливает на двигатель, стараясь выровнять гироскоп горизонтально. При имитации продавливания, наклоне гироскопа еще, двигатель включается полностью. Торможение электродвигателя происходит при уменьшении угла наклона, вплоть до остановки и переключения реверса, вращения в противоположную сторону.
Мозги отвечающие за движение наездника протестировал, теперь надо все аккуратно упаковать и можно переходить к механике. В следующей статье расскажу, как я задумал передать вращение двигателя на колесо и может быть, как сложить руль.