


Добрый день всем читателям и любителям поработать руками. На улице осень, а значит пора уличных работ почти подошла к концу. Можно уже забыть про дорожки около дома. Если кто не успел их сделать – начинать уже поздно, можно только немного доделать, если начинали. В дождливую погоду я снова взялся за Lego. Мне нравиться этот конструктор, легко можно собрать практически любые механизмы или модели. Также его легко можно электрифицировать. Добавив моторов и управляющую электронику. Мне не понравилось только то, что моторчики, идущие в комплекте с Lego, не позволяют сделать быстрые модели. В основном это получаются скорее внедорожники, чем скоростные модели. Я решил это немного исправить. Сегодня мы будет собирать модель очень шустрого багги. За шустрость будет отвечать мотор и планетарный редуктор от старого шуруповерта.
Нам понадобится:
- Старый шуруповерт
- Arduino
- Bluetooth модуль HC-05 или HC-06
- SG-90 сервопривод
- Tip 122 2 шт
- Tip 127 2 шт
- Аккумуляторы 18650 4 шт
- Резистор 2.2 кОм 4 шт
- Конденсатор 10v 1000uF
- Катушка индуктивности 68мкГн
- Макетная плата
- 7805 – стабилизатор напряжения на 5 вольт
- Lego наборы 42029, 42079 и 42033
- Немного оцинковки
- Сверло по металлу 3 мм и 8 мм
- Болтики 3х16, 3х30, 3х40, 3х70 мм и гайки, шайбы к ним
- Металлический уголок от конструктора 4 шт
- Набор юного радиолюбителя
- Инструменты
Шаг 1 Шуруповерт.
Нам понадобиться старый шуруповерт. У меня давно валялся такой. В результате падения у него треснул корпус, склеив его он еще проработал немного, но пластик начал трекать и в другом месте. Кроме этого, аккумулятор уже совсем не держал заряд, а найти такой новый – практически нереально. Уж слишком он старый. Поэтому проводим трепанацию шуруповерта:

Разбираем корпус и достаём из него все внутренности:

На понадобиться мотор, вместе с планетарным редуктором. Достаем мотор и редуктор.

Часть, которая отвечает за установку усилий (сразу после редуктора, с шариками внутри) нам не нужна. Редуктор стоит перебрать. Старую смазку стираем, она наверняка уже вся черная.

И тут возникает проблема соединения мотора с редукторов воедино. Внутри корпуса шуруповерта, они стоят в своих пазах, и за счет этого прижаты друг к другу и не распадаются. В нашем же случаем необходимо чтобы мотор и редуктор составляли одно целое:

Для этого нам понадобиться оцинковка. Вырезаем два квадрата 40х40 мм. В углах проделываем отверстия 3 мм, для соединения их вместе. В середине 8 мм отверстие для валов. В одной из заготовок размечаем отверстия для крепления мотора:

Она ставить на мотор и должна быть прикручена к нему:

Во втором квадрате больше никаких отверстий не надо:

Собираем все вместе, зажав редуктор между двух, изготовленных нами пластин. Во время сборки не забудьте смазать шестеренки редуктора. Главное не переборщить, чтобы смазка потом не вылезала ото всюду и не пачкала все подряд.
Шаг 2 Собираем основу модели.
Пришло время вытереть руки от смазки и собрать модель, точнее, пока что основу.
Заднюю часть подвески берем от внедорожника 42029. Берем инструкцию от Lego 42029 часть 1, и начиная с третьей страницы и по восьмую включительно собираем все по ней. Затем добавляем немного деталей, смотри по фото, чтобы можно было установить двигатель и редуктор.
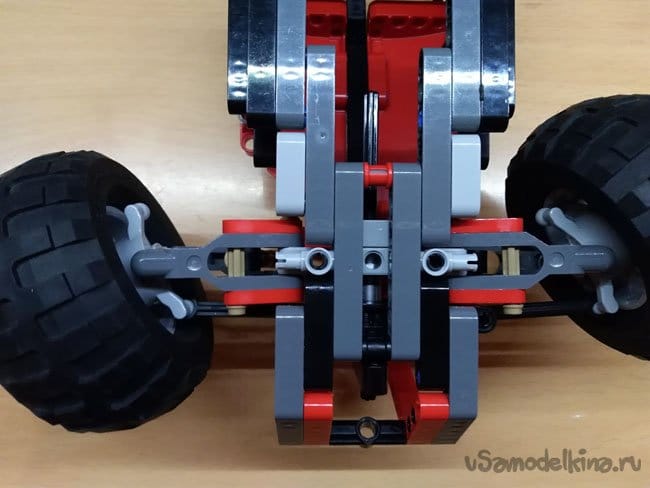
Переднюю часть подвески берем там же, только на других страницах. Собираем ее следуя инструкции Lego 42029 часть первая, с двадцать первой страницы по двадцать третью. Затем переходим на вторую часть инструкции с 6 страницы по 11. Лебедку собирать не надо. А вот бампер из второй части 34 -36 страницы нам пригодиться. Получаем следующее:

Над задними колесами делаем отсек для аккумуляторов и электроники:

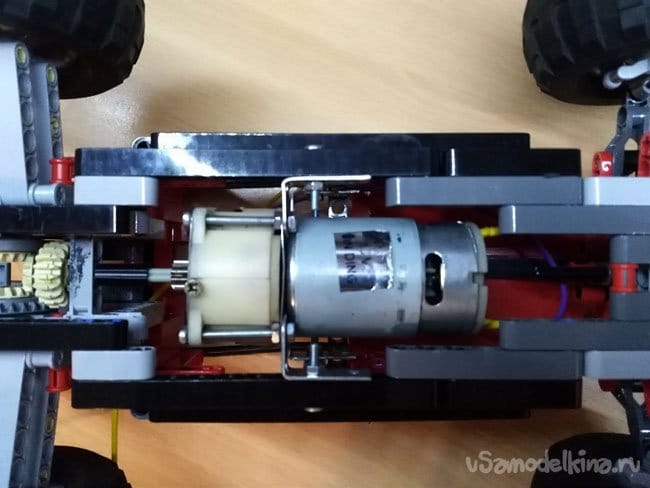
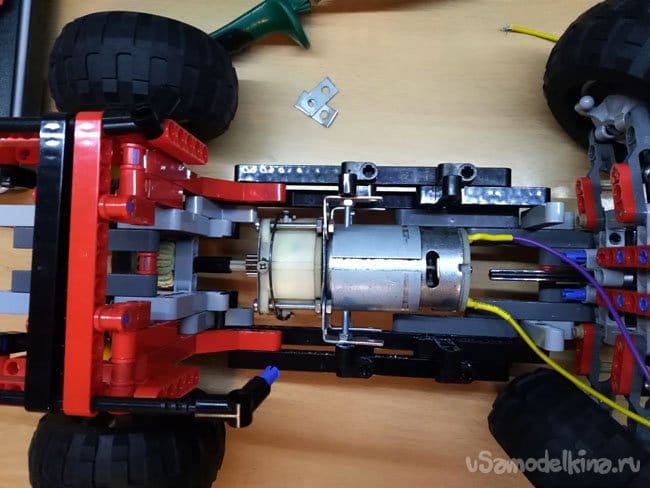
Шаг 3 ставим мотор с редуктором на модель.
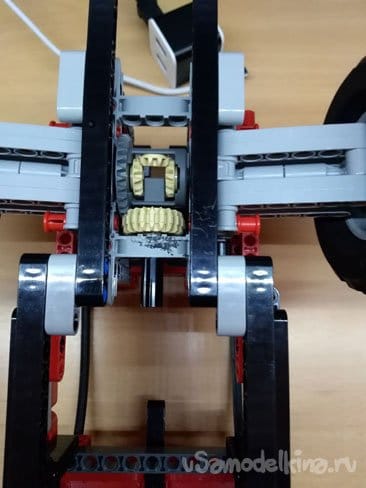
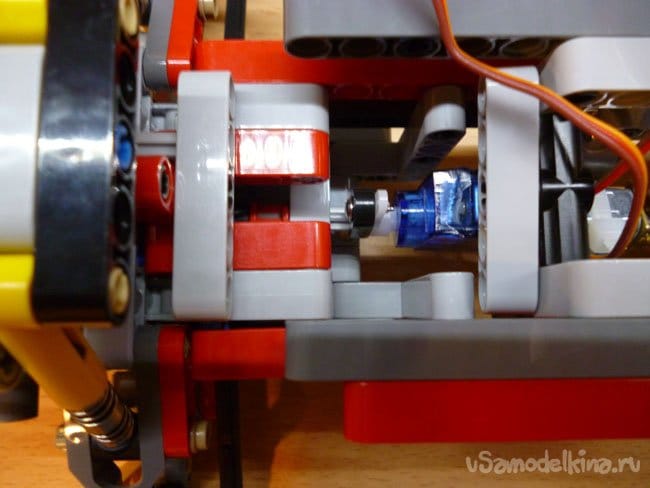
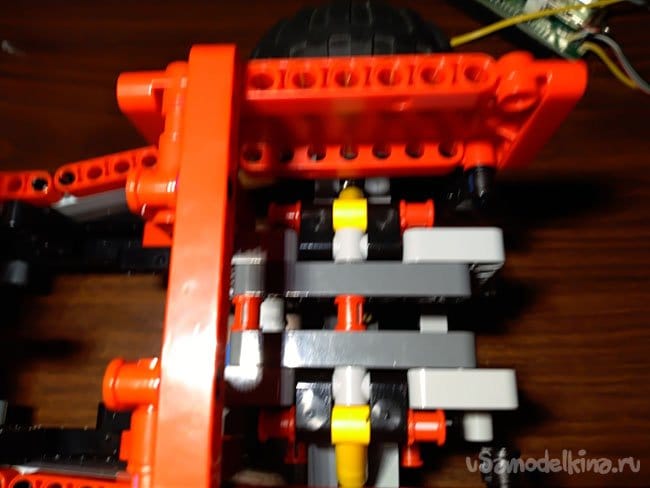
Мотор с редуктором крепим, используя уголки от металлического конструктора, или изготовив их самостоятельно из листового металла. Уголки с одной стороны прикручиваем к четырем болтам, которые соединяют редуктор, с другой стороны к деталям Lego. В середине выходного вала редуктора есть отверстие. Слегка срезав грани от крестовой детали Lego, вставляем ее в отверстие. Она должна вбиваться туда достаточно плотно, чтобы потом не проскальзовала:
Сверху смотрит так:
Шаг 4 установка сервопривода.
Установить сервопривод SG-90 на Lego не так просто, как кажется. Для начал нам нужно срезать выступающие детали от SG-90, в обычных условия, служащие для его крепления:

Затем соединяем маленькую деталь от Lego с рычагом от сервопривода:

И осталось проделать сквозное отверстие 3 мм в корпусе сервопривода. Сверлим его как можно ниже, так чтобы не задеть плату управления сервопривода и провода внутри его. Можно сделать просто прорези, правда, для этого понадобиться разобрать сервопривод. Сразу же надеваем на него нашу соединительную деталь:

Сервопривод будем ставить под капотом ближе к передним колесам:

Крепим его используя длинный болтик 3х70. Продеваем болт с одной стороны через Lego деталь, затем надеваем сервопривод, и продеваем в Lego деталь с другой стороны.
Шаг 5 Паяем драйвер мотора.
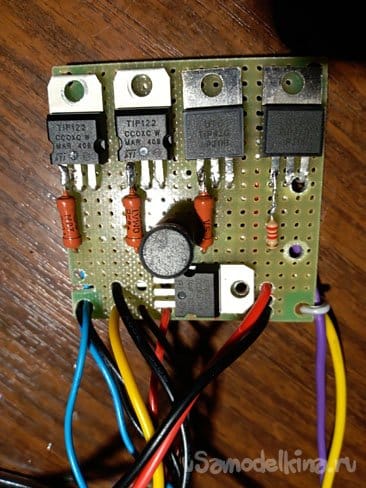
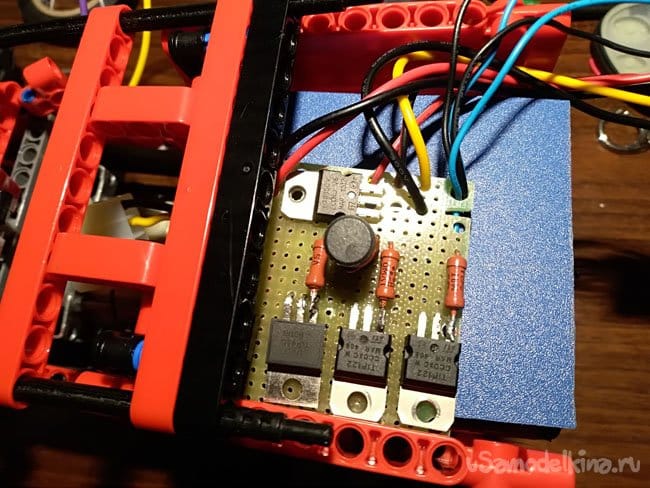
Моторчик у нас не маленький и обычным маленьким драйвером здесь не обойтись. Будем паять драйвер сами, а точнее H мост на транзисторах. Будем использовать транзисторы n-p-n TIP 122. Комплементарной парой для него является транзистор TIP127 c p-n-p структурой. Берем макетную плату два TIP122 два TIP127 и паем по схеме:
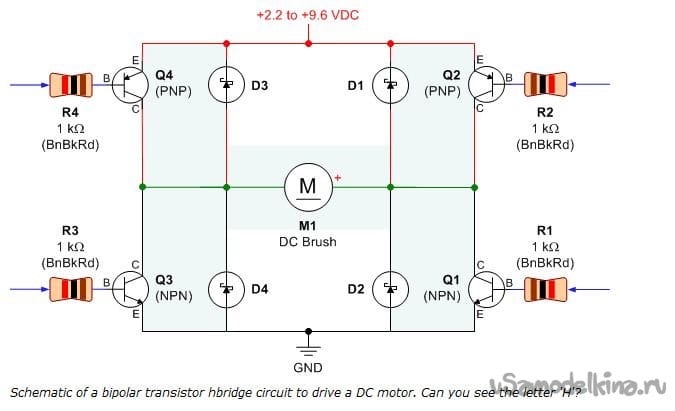
На той же плате хорошо будет разместить стабилизатор напряжения 7805 для питания Arduino, Bluetooth модуля и сервопривода. Чтобы обеспечить микросхемы стабильным питанием добавим в схему еще катушку индуктивности после стабилизатора, а также конденсатор тоже будет очень полезен.
Шаг 6 Аккумулятор.
Мощному моторчику нужен хороший источник питания. Для питания будем использовать литиевый элементы 18650. Для такого мотора будем использовать примерно 8В. Спаиваем две пары аккумуляторов параллельно, и эти пары между собой последовательно, чтобы на выходе получить примерно 8В:

Скручиваем их изолентой, чтобы не распадались:

Для дополнительной изоляции на аккумуляторы приклеиваем прямоугольник из пластика:
Устанавливаем полученную связку на место. Над задними колесами, на планку крепления амортизаторов:
Ставим их на место:

Сверху на двусторонний скот крепим драйвер:
Шаг 7 Arduino и Bluetooth.
Для управления моделью будем использовать связку Arduino и Bluetooth. Я написал уже много статей, где подробно описывал процесс подключения и настройки такого способа связи. Поэтому, вкратце, Arduino можно использовать любую. Если вы впаяли стабилизатор напряжения 7805, то питание Arduino, Servo SG-90 и Bluetooth берем от нашего стабилизатора. Если нет, надо позаботиться об отдельном питании этих элементов. Так как при включении мотора происходит сильная просадка напряжения, Arduino будет перезагружаться. Связь с Bluetooth будет через библиотеку SoftSerial, чтобы основной порт связи оставался свободным для подключения к компьютеру и отладки скетча. Подключаем Bluetooth модуль следующим образом:
Arduino Nano - Bluetooth
D7 – RX
D8 – TX
5V – VCC
GND –GND
Управление рекомендую сделать по моей инструкция по изготовлению пульта. Вначале делаем инфракрасный пульт.
Затем добавляем в него Bluetooth модуль.
Шаг 8 Программы и скетч.
Ставим Arduino IDE с официального сайта.
Скачиваем мой скетч:


Становитесь автором сайта, публикуйте собственные статьи, описания самоделок с оплатой за текст. Подробнее здесь.

